
Fターム[5H501GG03]の内容
Fターム[5H501GG03]の下位に属するFターム
負荷の検出値をフィードバックするもの (45)
Fターム[5H501GG03]に分類される特許
121 - 140 / 670
サーボシステム、サーボモータ駆動装置、セーフティユニットおよびサーボシステムの制御方法
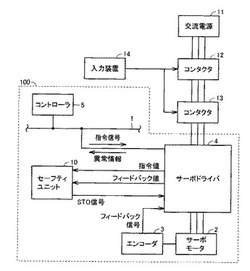
【課題】サーボシステムに用いられるエンコーダを、安全機能を有するものに入れ替えることなく、サーボシステムの安全化を図る。
【解決手段】サーボドライバ4は、コントローラ5からの指令信号に基づいて、サーボモータ2の動作に関する指令値を設定する。サーボドライバ4は、その指令値およびフィードバック信号から得られたフィードバック値をセーフティユニット10に送信する。サーボドライバ4から送られた指令値およびフィードバック値の少なくとも一方の値が異常である場合に、STO信号を発生させるとともに、そのSTO信号をサーボドライバ4に送信する。サーボドライバ4にSTO信号が入力された場合、サーボドライバ4はサーボモータ2への電力の供給を停止する。従来から使用されていたエンコーダを用いて安全規格に適合したサーボシステムを構築することが可能となる。
(もっと読む)
モータの制御装置

【課題】 特別なセンサなどを用いずに、制御対象の振動を抑制して、制御対象を高速、高精度に制御できるモータ制御装置を提供する。
【解決手段】 モータの制御装置1は、速度検出器2と、位置検出器を構成するエンコーダ3と、速度制御器4と、位置制御器5と、トルク制御器6と、ピークフィルタ7とを備えている。ピークフィルタ7は、モータを設置している機台と制御対象との間で発生する機台振動中の反共振周波数成分を増幅し、該反共振周波数成分の周波数で制御対象が反共振特性をもたない剛体システムのようになるように伝達関数が定められている。
(もっと読む)
モータ駆動装置
【課題】速度制御から位置制御への切替をシームレスに行い、機械伝達系に衝撃を与えないモータ駆動装置を提供。
【解決手段】位置指令生成手段と位置指令フィルタ手段と速度フィードフォワード手段と位置制御手段と速度制御手段と速度制御時指令位置算出手段と位置/速度制御切替手段と指令位置切替手段とを備え、前記速度制御時指令位置算出手段においてモータ駆動装置から前記上位コントローラへの伝送遅れ時間の間のモータ移動量と、前記上位コントローラからモータ駆動装置への伝送遅れ時間の間のモータ移動量とを現在位置に加算して前期速度制御時指令位置とし、速度制御から位置制御への切替時において前回の前記速度制御時速度指令から算出される位置偏差量を位置偏差の初期値とするとともに、前記位置指令生成手段において前記位置偏差量を現在位置に加算したものを位置制御時指令位置の初期値として設定した後、前記目標位置指令による位置制御を行う。
(もっと読む)
モータの制御方法及び装置
【課題】 モータの出力をできるだけ大きなトルクで減速し、しかも、位置決め時のオーバーシュートが小さく、高速に位置決めできる定位置停止制御装置を実現する。
【解決手段】 モータMの回転子の回転速度がオリエンテーション速度になった後、制御部7は、位置ループ速度指令vcにより指令された速度と2乗速度v2との偏差を速度制御器4に与える。速度制御器4から出力されたトルク指令tcに、制御部7が決定したトルク加算指令acを加算部ADで加算して得た加算トルク指令atcをトルク制御器6に与える。オリエンテーション制御に用いる物理変数を用いて定めたスライディングカーブに沿って回転子の位置及び速度を制御することにより、回転子を目標位置に停止させるスライディングモード制御によりトルク制御器の入力を調整する。
(もっと読む)
種々のモータ制御機構を有するクルーズコントロールシステムにおける高精度適応モータ制御
【課題】種々のモータ制御機構を有するクルーズコントロールシステムにおいて高効率の制御機構でのモータ動作の範囲を延長する高精度適応モータ制御を行う。
【解決手段】可変運転条件のもとで希望の速度を維持するように電気乗物を適応制御するための新規なクルーズコントロールシステムが提供される。このシステムは、制御電流の種々の波形プロフィールを使用してモータを制御するために多数のモータ制御機構を使用し、そして運転条件の変化に応答して制御電流と逆EMFとの間の位相進み角度を適応制御して、希望の速度を達成するのに充分な制御電流を発生するために設けられた位相進み角度調整を含む。モータ制御機構選択回路は、クルーズコントロールシステムが現在の運転条件に適した電流波形プロフィールを選択できるようにする。
(もっと読む)
モータの制御方法及び装置
【課題】 モータの負荷イナーシャが変わったことを高速に検出し、モータの負荷イナーシャが変わった場合でも高速に定位置停止制御ができるモータの制御装置を提供する。
【解決手段】 モータMの回転子の回転速度がオリエンテーション速度になった後、制御部17は、位置ループ速度指令vcにより指令された速度と2乗速度v2との偏差を速度制御器14に与える。オートチューニング部18は、オリエンテーション制御の前に、回転子の加速度を算出し、加速度の絶対値の最大値に基づいて位置制御器15のゲインCを決定する。
(もっと読む)
モータ制御装置
【課題】 モデル制御系のパラメータを簡単に調整でき、しかも、モデル速度制御器から出力されるトルク指令が過大になることがなく、より高速で振動のない位置決めを実現できるモータ制御装置を提供する。
【解決手段】 モデル制御系1は、モータについての第1の慣性系の機械モデルと、負荷についての第2の慣性系の機械モデルと、モータと負荷との間のねじりトルクについてのねじりトルクモデルと、フィードバック加速度指令S10をモデルトルク指令部8にフィードバックする第1の状態フィードバック系と、フィードバック速度指令S5をモデル速度指令部5に状態フィードバックする第2の状態フィードバック系とを備えている。モデル制御系の状態方程式から得られる特性方程式が4重根を持つように演算して得たパラメータの関係式に基づいて、モデル制御系のパラメータが定められている。
(もっと読む)
モータ駆動装置、モータ駆動システム及びマイクロコンピュータ
【課題】モータの目標速度値と、その速度検出値との差分の演算結果から、一方の基準信号自身の誤差成分を相殺除去できるようにすると共に、精度の低い発振器を使用した場合であっても、他方の基準信号に同期した駆動指令値を制御対象に出力できるようにする。
【解決手段】基準クロックを発生するオシレータ1と、モータに命令を発行するためのシステムクロックに同期したモータ目標速度信号を入力すると共に、基準クロックに基づいてモータ目標速度信号から当該モータの目標速度値を算出するカウント部21と、モータ速度クロックを入力すると共に、基準クロックに基づいてモータの速度検出値を算出するカウント部31と、モータの目標速度値とその速度検出値との差分を演算してモータ駆動指令値を作成する制御部51と、基準クロックに基づいてモータ駆動指令値をモータ駆動指令信号に変換して出力する指令クロック生成部41とを備えるものである。
(もっと読む)
モータ速度検出構造、角速度センサ付き角度センサおよびサーボシステム
【課題】 角度センサを有するサーボシステムにおいて、演算器の負荷を軽減でき、低速時の速度演算の誤差を低減でき、速度制御性にも検出精度にも優れたシステムを提供すること。
【解決手段】 モータ速度検出構造10は、モータ1の回転による角度情報を検知してモータ1の位置制御用として提供するための角度センサ2と、モータ1の回転による角速度情報を検知してモータ1の速度制御用として提供するための角速度センサ3とから構成する。角度センサ2としてはレゾルバ、角速度センサ3としてはジャイロスコープを用いることができる。ジャイロスコープはレゾルバのロータあるいはサーボの軸に取り付ければよい。
(もっと読む)
飲料供給装置
【課題】飲料原料を攪拌羽根により攪拌して調理する飲料供給装置において、その攪拌羽根を確実に設定した回転数になるように制御し、原料の溶け残り等の攪拌不足を防止する。
【解決手段】飲料攪拌装置20により調理した飲料を容器に注ぎ出す飲料供給装置1であって、飲料攪拌装置20は、飲料原料と湯水を攪拌、混合する攪拌容器12と、その内部の攪拌羽根15と、攪拌羽根15を駆動するPWM制御可能な攪拌モータ13と、その攪拌モータ制御手段21と、を備え、攪拌モータ制御手段21は、攪拌モータ13の回転数設定手段26と、その回転数を制御するPWM制御手段23と、その回転数を実測する回転数実測手段27と、設定された回転数と実測された回転数を比較する回転比較手段28と、を備え、PWM制御手段23は、回転比較手段の比較結果に基づいて、攪拌モータ13の回転数が設定された回転数となるように、供給する電圧の通電率を制御する。
(もっと読む)
ロボットシステム
【課題】モータの駆動を制御する駆動制御手段の制御内容を変更することなく、減速時間が長くなることを抑制しつつ、減速動作時にモータから生じる回生エネルギーを消費する際に発生する熱を低減することができるロボットシステムを提供する。
【解決手段】制御部27は、モータMが加速動作状態から定速動作状態に移行すると、電圧制御スイッチ30のオン、オフを制御することでバス電圧Vdを定常値から下限電圧値まで低下させる。バス電圧Vdは、減速動作時において回生エネルギーによって上昇するものの、定速動作時にバス電圧Vdを低下させた分だけ減速動作時におけるそのピーク値が低くなる。この結果、減速動作時にバス電圧Vdが回生消費電圧値以上になったとしても、ピーク値が低下した分だけ回生消費回路23が動作する期間が短くなる。
(もっと読む)
電動機の制御装置
【課題】作業状態や載荷状態に応じて大きく変化する慣性の駆動において、慣性が小さい場合にも角加速度が大きくなり過ぎず、良好な操作感覚が得られる電動機の制御装置を提供する。
【解決手段】慣性体の慣性より小さい慣性を有する駆動系を介して駆動する電動機の制御装置において、作業状態あるいは載荷状態で慣性の大きさが変化する作業手段あるいは載荷手段を含み、電動機の角加速度の最大値を、電動機の出力トルクによって慣性体の最小値を加速する角加速度以下の所定の値に制限する。
(もっと読む)
画像形成装置、サーボ制御装置、プログラム
【課題】キャリッジを駆動するときに目標停止位置に求められる最も高い停止位置精度が得られるサーボ制御終了タイミングでサーボ制御を終了しているために停止までの時間がかかる。
【解決手段】キャリッジ3を駆動するとき、当該駆動の目標停止位置に求められる停止位置精度を判別し、停止位置精度が高いときには、サーボ制御を終了タイミング1で終了し、停止位置精度が中のときには、サーボ制御を終了タイミング2で終了し、停止位置精度が低いときには、サーボ制御を終了タイミング3で終了する。
(もっと読む)
電動機の速度制御装置
【課題】速度制御時に機械共振の発生要因となる負荷と電動機を連結した機械系を、インバータで制御する場合、電動機の慣性は既知であっても、負荷側の慣性値が不明により、機械系との共振特性に起因する不安定現象が発生する。
【解決手段】速度制御部の出力側にトルク電流指令に対するゲイン補償部を設ける。また、機械系で算出された軸トルク検出に対する重み係数を付与する重み係数補償部を設け、各補償部の出力信号を加算してトルク電流指令として電流制御部に入力する。また、軸トルク検出の代わりとして、外乱オブザーバの補償出力に対する重み係数補償部を設ける。
(もっと読む)
モータを備える機器
【課題】 移動体を移動させるタイミングベルトの伸びの変化があっても、モータのコギングの影響を抑制する。
【解決手段】 移動体と、モータと、モータを駆動する駆動手段と、エンコーダとを備える電子機器であって、前記モータが接続されたモータプーリと、従動プーリと、タイミングベルトを備え、前記移動体を走査する走査手段と、前記エンコーダから出力された信号に基づく位置と速度の情報に基づき駆動指令に従って第1制御信号の生成を行うとともに、前記モータのコギング周期と前記位置の情報に基づく周期的な第2制御信号の生成を行い、前記第1及び第2制御信号を前記駆動手段へ出力する信号生成手段とを備え、前記移動体の第1走査位置に対応する前記第2制御信号の周期は、従動プーリ前記第1走査位置より前記従動プーリに相対的に近い第2走査位置に対応する前記第2制御信号の周期と異なる。
(もっと読む)
動力線の損失を少なくとも表示または出力する機能を有する電動機制御装置
【課題】動力線の損失を表示または出力する機能を有する電動機制御装置を提供する。
【解決手段】直流を交流に変換し、工作機械や産業用機械に備わった電動機16−1〜16−nに、電力を供給するインバータ14−1〜14−nを有する電力供給部に対して、電動機に流れる電流を検出する電流計18−1〜18−nによって検出された電流検出値と、電動機を駆動するための電流指令値とを元に指令し、電動機を駆動制御する電動機制御装置10において、電動機制御装置10のメモリ内に予め設定されている電動機とインバータ間の動力線20−1〜20−nの損失値を計算する損失計算部と、損失計算部により計算された損失値を、表示する表示部、または電動機制御部の外部機器に出力する出力部のいずれか一方と、を備えた。
(もっと読む)
検出システム、制御システム、画像形成システム及び制御方法
【課題】高精度な位置制御及び速度制御を実現可能とする。
【解決手段】エンコーダ装置40から出力される正弦波のアナログA相及びB相信号を、信号処理回路50で次のように変換する。即ち、信号処理回路50では、アナログA相及びB相信号をディジタル化して無逓倍のディジタルA相及びB相信号を生成すると共に、アナログA相及びB相信号を4倍に逓倍且つディジタル化して、ディジタル逓倍A相信号及びディジタル逓倍B相信号を生成する。更には、ディジタルA相及びB相信号の排他的論理和(XOR)信号を、ディジタルZ相信号として生成する。位置検出部61は、ディジタル逓倍A相信号及びディジタル逓倍B相信号に基づき、対象物の位置を検出する。一方、速度検出部631,632,633は、ディジタルA相信号、又は、ディジタルZ相信号、又は、ディジタルA相及びB相信号の両者に基づき、対象物の速度を検出する。
(もっと読む)
位置制御装置
【課題】速度制御系をマイナーループに、位置制御をメジャーループに持つ位置制御では、高応答にするための調整が困難となっている。
【解決手段】位置制御部にフィードフォワード部を設ける。位置制御部に入力されるステップ状の角度指令θrefと制御対象物の角度検出θdetから比の伝達関数を次式で求める。
θdet/θref={KIω(FFθ+KPθ)}/{Jdys3+(KPω+Ddy)
s2+KIωs+(KIω*KPθ)}
フィードフォワード部のパラメータFFθを、上式の分子多項式の零点=分母多項式の定数項としてKIω(FFθ+KPθ)=KIω*KPθからFFθ=0
として求める。
(ただし、KPθは位置制御部の比例パラメータ、KPω,KIωは速度制御部の比例及び積分パラメータ、Jdyはモータ慣性、Ddyは回転損失s)
(もっと読む)
モータ制御方法及び装置
【課題】 機械系に剛性の低い部分があったとしても、位置決め精度を低下させることなく、機械系の微振動を抑制できるモータ制御方法及び装置を提供する。
【解決手段】 現在速度データ生成部9は、差分現在位置データ生成部7が生成した差分現在位置データに基づいてモータMの可動子の現在速度データを生成する。現在速度データ生成部9は、極性判定部11が極性が変化したことを判定した後直ちに、差分現在位置データ生成部7から出力される差分現在位置データを1以上の整数であるnサンプリング周期の間ゼロとして現在速度データを生成する。現在速度データ生成部9は、nサンプリング周期が経過した後、差分現在位置データをゼロから実際のデータに戻す。その結果、制御できない力の影響で可動子の振動が大きくなって、騒音が発生するのを防ぐことができる。
(もっと読む)
電動機の速度制御装置
【課題】PI制御のみの速度制御では、指令応答と外乱応答の両方を向上することは、トレードオフの関係にあることから困難となっている。
【解決手段】速度制御部にフィードフォワード部を設ける。速度制御部に入力されるステップ状の角速度指令ωrefと制御対象物の角速度検出ωdetから比の伝達関数を次式で求める。
ωdet/ωref=(KI + FF{ EMBED Equation.3 , })/{Jdys2+(KP+Ddy)s+KI}
フィードフォワード部のパラメータFFを、上式の分子多項式の零点=分母多項式の定数項とし、KI+FFs=KIからFF=0として求める。
(ただし、KP,KIは速度制御部の比例、及び積分のパラメータ、Jdyはモータ慣性、Ddyは回転損失)
(もっと読む)
121 - 140 / 670
[ Back to top ]