
Fターム[5H501GG03]の内容
Fターム[5H501GG03]の下位に属するFターム
負荷の検出値をフィードバックするもの (45)
Fターム[5H501GG03]に分類される特許
101 - 120 / 670
プレス機械、および、プレス機械の制御方法
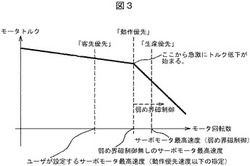
【課題】サーボプレス機械において、ユーザの生産目的に合わせた動作指定を事前におこない、サーボモータの回転数と出力トルク特性に応じて、加減速の制御をおこなえるようにする。
【解決手段】弱め界磁制御を始める回転数の動作モードである動作優先モード、それより小さな回転数の動作モードである客先優先モード、それより大きな回転数の動作モードである生産優先モードのいずれかの動作モードを設定する。そして、設定された動作モードに応じて、最高非加工速度、加減速時定数、加減速終端丸め定数からなるサーボパラメタによりサーボモータに対してサーボ制御をするように設定する。客先優先モードでは、加減速時定数を小さくし、加減速の変化を大きくして、生産優先モードでは、加減速時定数を大きくして、加減速の変化を小さくする。
(もっと読む)
作業機械の電動機トルク制御装置

【課題】制御ゲインを適正に補正し、制御の安定性及び応答性を両立させる。
【解決手段】本発明の実施形態に係る電動機トルク制御装置10は、トルク指令Trdの演算に用いる制御ゲインG1を補正する制御ゲイン補正手段18を備えている。制御ゲイン補正手段18は、所定時間毎に電動機9の速度変化Δ’ωを演算すると共に、トルク指令Trd(予測トルクTr)に対する速度変化Δ’ωの比率kに応じて制御ゲインG1を補正する。
(もっと読む)
電動機の制御装置
【課題】高速域における位相ずれを防止して高精度な速度制御を可能にする。
【解決手段】第1の制御周期に従い速度制御を行って電動機の電流指令を生成する速度制御系と、第2の制御周期に従い電流制御を行って電力変換器の出力電圧指令を生成する電流制御系と、電力変換器の出力電圧位相を用いて出力電圧指令及び電流検出値を座標変換する手段と、を備えた制御装置において、ラッチ信号作成部21、エッジ保持部26、回転方向検出部32及び保持部33、時間計測カウンタ23、ラッチ25−1〜25−4、エッジ変化情報保持部29と、回転方向,時間計測値及びエッジ変化情報を用いて回転速度を演算するCPU30と、出力パルスのエッジのうち少なくとも一つのエッジの数をカウントするカウンタ41と、そのカウント値を第2の制御周期ごとに保持するラッチ42と、前記カウント値から出力電圧位相を演算するCPU30内の位相演算手段と、を有する。
(もっと読む)
モータ位置制御装置
【課題】パルス態様の不整合によるモータの動作不具合を回避し、モータを確実に正常に作動させる。
【解決手段】外部から入力される指令パルス信号及び所望のパルス態様設定に基づいてモータ6を駆動するモータ位置制御装置1であって、所望のパルス態様設定に応じて、指令パルス信号から位置指令信号を生成するカウンタ2と、位置指令信号に基づいてモータ6に電力を供給するモータ制御部3と、所望のパルス態様設定と指令パルス信号との整合性を判定する整合判定部4とを有する。
(もっと読む)
サーボモータの健康警告装置およびその計算方法
【課題】本発明は、サーボモータの健康警告装置およびその計算方法に関する。
【解決手段】
サーボモータの健康警告装置およびその計算方法は、コンピュータ数値制御工作機械の振動状況の推測に使用される。まず、振動検出ユニットによって、振動信号が生成され、その後、該振動信号がデータバッファに順次伝送される。続いて、時間周波数領域変換ユニットによって、振動信号の時間周波数領域変換が行われる。最後に、悪化指数計算ユニットによって、悪化指数が計算され、健康指数計算ユニットを利用して、健康指数が得られる。したがって、内蔵の振動検出ユニットを利用して、余分な検出器の取付けおよび配線を省くことができる。さらに、健康指数の大小によって、サーボモータがコンピュータ数値制御工作機械において回転することによる振動状況を推測する。非線形および非定常の振動特性に対して、好適な解析を提供する。
(もっと読む)
同期機の位置センサレス制御装置
【課題】多重巻線構成にした同期機の位置センサレス制御において、多重巻線からの電圧や電流情報にアンバランスが存在する場合にも各インバータの位相推定情報を1つに統合処理し、この統合処理に制御要素の共通化と制御情報の通信を簡略化できる。
【解決手段】二重巻線構成にした同期機の1つの巻線をマスターインバータで駆動し、残りの巻線をスレーブインバータで駆動し、両インバータは回転座標上の電圧指令と電流検出信号およびモータの回路定数と推定速度から推定位相角Δφ^e1およびΔφ^e2を演算し、平均値演算部20は推定位相角の平均値を求め、速度推定部12は平均値から推定速度ω^reを演算し、位置積分部13は推定速度を時間積分して推定基準位相θ^を演算する。
平均値演算は速度推定後に行う構成、または位置積分後に行う構成も含む。
(もっと読む)
モータ制御装置を含む制御機器
【課題】発振時の安定化等で制御パラメータが変更された時、機器の安定動作と稼働率低下抑制を両立させることを目的とする。
【解決手段】モータ制御装置は、速度指令あるいは位置指令を入力して、それに追従するようにモータの回転速度あるいは回転位置を検出してフィードバック制御を行うフィードバックループを有するものである。このモータ制御装置は、第1の制御性能判断部11と、制御パラメータ変更部10と、モータ1の位置を検出する位置検出器3からの出力信号を受ける速度演算器4と、位置制御器5と、速度算出器の出力信号を受ける発振検知部9と、発振検知部9からの出力信号を受ける速度制御器6と、トルク制御器7と、を備える。
(もっと読む)
電気推進船の駆動装置及び駆動方法
【課題】船内電源の電源母線の電圧を急変動させることなく、簡単な方法で停止制御を行うことが可能な電気推進船の駆動装置及び駆動方法を提供する。
【解決手段】船舶の推進用プロペラPの軸に接続した電動機1と、船内電源3から給電され、電動機1を駆動する電力変換装置2と、電力変換装置2を制御する制御装置4とで構成する。制御装置4は、外部からの速度指令に基づいて速度制御してトルク基準を出力する速度制御部41と、外部からの運転指令に基づいて電動機1の運転停止を制御する運転シーケンス制御部46を備える。運転シーケンス制御部46は、外部からの運転指令がオフとなったとき、一旦速度基準を所定の減速率で減速し、トルク基準が所定値以下となるか、または力行から回生に変化したときに電力変換装置2を停止して電流を遮断する。
(もっと読む)
誘導電動機の制御装置及び制御方法
【課題】振動の原因となっている推定磁束の直流成分を除去し、モータの振動を低減する制御方式を実現した誘導電動機の制御装置又は制御方法を提供する。
【解決手段】誘導電動機の制御装置10は、誘導電動機106に供給される電流を、静止座標上のα相電流及びβ相電流に変換する3相/2相座標変換器108と、回転座標上のd軸成分の磁束電圧指令及びq軸成分のトルク電圧指令を、静止座標上のα相電圧指令及びβ相電圧指令に変換するdq/2相座標変換器120と、α相電流及びβ相電流と、α相電圧指令及びβ相電圧指令とを入力してα相磁束推定値及びβ相磁束推定値を算出する磁束推定器11と、α相磁束推定値及びβ相磁束推定値からオフセットを取り除くオフセット除去処理部12と、オフセット除去処理部12からのα相磁束推定値及びβ相磁束推定値を入力して誘導電動機106の速度を推定する速度推定器112と、を備える。
(もっと読む)
モータ駆動装置及びモータ駆動車両
【課題】トルク制御と速度制御の切り換えタイミングと、クラッチの接続/分離タイミングとの不一致の問題に対処するためのモータ制御技術を提供する。
【解決手段】モータ駆動装置が、上位トルク指令に応答して第1トルク指令を生成するトルク制御手段と、上位速度指令と3相モータのロータ回転数とに応答して第2トルク指令を生成する速度制御手段と、第1トルク指令と第2トルク指令のいずれかから選択された選択トルク指令に応答してインバータを制御するインバータ制御手段と、クラッチを接続状態と分離状態の間で切り替えるクラッチ制御手段とを備えている。選択トルク指令は、クラッチの切り替えに対応して第1トルク指令と第2トルク指令のいずれかから選択される。トルク制御手段は、ロータ回転数の絶対値が所定の速度制限値を超えた場合、第1トルク指令の絶対値が上位トルク指令の絶対値より小さくなるように第1トルク指令を生成する。
(もっと読む)
プログラム、記録媒体、サーボモータの制御パラメータ調整方法、開発支援装置、サーボシステムの開発システム
【課題】サーボモータを制御するサーボドライバのパラメータを容易に調整可能な技術を提供する。
【解決手段】ユーザは、自身の利用する装置を開発支援装置の画面上で選択する。選択された装置(機械構成)と剛性値とが関連付けられる。さらに剛性値とサーボドライバの制御パラメータとが対応付けられる。完了条件を満たすように、制御パラメータが自動的に調整される。したがって、ユーザが自身の利用する装置を選択するだけで、サーボドライバのパラメータを自動的に調整することができる。
(もっと読む)
モータの制御装置
【課題】モータの制御装置において、慣性モーメントを含む機械定数の推定に要する時間を短縮し、加減速時間に関わらず一定とする。
【解決手段】負荷駆動用のモータの機械系モデルを構成する機械定数を、速度相当値及びトルク相当値から推定する機械定数推定部30を備えた制御装置において、機械定数推定部は、機械系の加速度相当値に第1のゲインを乗算して第2の加速度相当値を演算する加速度演算手段(微分器31及びゲイン乗算器32)と、第2の加速度相当値、速度相当値及びトルク相当値から、第2の加速度相当値の比例係数である第2の慣性モーメント推定値を含む機械定数を演算する機械定数演算手段(逐次形最小二乗演算部33)と、第2の慣性モーメント推定値に第2のゲインを乗算して慣性モーメントを推定するためのゲイン乗算器34と、を備え、第1のゲインと第2のゲインとを同じ値Kamとする。
(もっと読む)
自動ドア駆動制御装置
【課題】本発明は、特定の速度域において最適となるように調整された制御ゲインがその速度域以外では最適な制御ゲインとならないことに起因する速度の不安定性を解消でき、制御の応答性を向上できる自動ドア駆動制御装置を提供することを課題とする。
【解決手段】本発明による自動ドア駆動制御装置では、フィードバック速度制御部32は、自動ドアのドア体を開閉するモータ10への入力電圧20aを、速度指令43aと検出開閉速度60aとに基づいて制御することで、ドア体の開閉速度制御を行う。ゲイン変更部33は、ドア体の現在位置42aに応じてゲイン変更指令33aをフィードバック速度制御部32に入力して、フィードバック速度制御部32の開閉速度制御の制御ゲインを変更する。
(もっと読む)
PID制御器のモード切替装置
【課題】PID制御器の動作モードを手動モード及び自動モードに切り替える場合、モードの切替によって発生する衝撃を除去し、安定してモードを切り替えることができるPID制御器のモード切替装置を提供すること。
【解決手段】本発明は、手動モード切替信号及び自動モード切替信号に応じて、自動モード及び手動モードのPID演算を行って、駆動信号を発生するPID演算部、前記手動モード切替信号が発生した場合、前記PID演算部が発生する駆動信号を処理して、負荷駆動機に出力する手動モード緩衝部、及び、前記自動モード切替信号が発生した場合、前記PID演算部が発生する駆動信号を分析して、前記PID演算部に出力する速度差積分信号計算部を含む。
(もっと読む)
電子機器の制御装置、駆動源のトルク出力制限方法及び電子機器
【課題】制御負荷を低減させつつ、駆動源から出力されるトルクの制限制御を適切なタイミングで実行させることができる電子機器の制御装置、駆動源のトルク出力制限方法及び電子機器を提供する。
【解決手段】PF制御部52は、PFモーター14に流れる電流値Iを取得する電流値算出部66と、PFモーター14の目標速度Vtを設定する第1印加電圧設定部65と、PFモーター14の回転速度Vnを検出する回転速度算出部64と、目標速度Vtから回転速度Vnを減算して差分Vsubを取得する差分算出部67と、電流値Iに基づきPFモーター14から出力されるトルクTrを算出するトルク算出部69と、トルクTrが第1制限値を超える場合にはPFモーター14に印加する第2電圧V2を低下させる第2印加電圧設定部71とを備える。トルク算出部69は、差分Vsubが差分閾値KVsub未満である場合にはトルクTrを算出しない。
(もっと読む)
サーボモータを制御するためのフィードバック装置及びフィードバック方法
【課題】回転速度の測定精度を上げる。
【解決手段】少なくとも1つの回転角度センサ3.2及び回転速度センサ3.1を含む、モータ制御のフィードバックシステムであって、回転角度センサがコンピュータ2に回転角度測定値φを供給し、回転速度センサがコンピュータに回転速度測定値ωを供給し、回転速度測定値ωが積分されて参照回転角度が形成され、参照回転角度が回転角度測定値φと比較されて回転角度補正値が計算され、回転角度測定値φが校正され、コンピュータ2が制御の目的で実回転角度値及び/又は実回転速度値を与え、高回転速度では、実回転速度値が校正済み回転角度測定値であり、かつ、低回転速度では、実回転速度値が、積分済み回転速度測定値に応じて補間された回転角度測定値であり、高回転速度では、実回転速度値が、時間に関して微分された校正済み回転角度測定値であり、低回転速度では、実回転速度値が回転速度測定値である。
(もっと読む)
出力制御装置、温度制御装置、定着装置、画像形成装置、電気機器および出力制御プログラム
【課題】簡便な制御でON持続時間やOFF持続時間を短縮化して交流負荷に求められる特性の向上を図りながら、交流負荷への通電制御を適切に行うことができる出力制御装置、温度制御装置、定着装置、画像形成装置、電気機器および出力制御プログラムを提供する。
【解決手段】商用交流電源のゼロクロスポイント間隔以上の連続OFF、または商用交流電源のNゼロクロスポイント期間中で1ゼロクロスポイント期間ONかつ残りのN−1ゼロクロスポイント期間OFF、商用交流電源のNゼロクロスポイント期間中でN−1ゼロクロスポイント期間ONかつ残りの1ゼロクロスポイント期間OFF、または商用交流電源のゼロクロスポイント間隔以上の連続ONのいずれかの制御状態にて交流負荷への通電を制御し、ゼロクロススイッチングによりON/OFFの切り替えを行う。Nは2以上の自然数で制御状態ごとに選択できる任意の数である。
(もっと読む)
モータ駆動装置
【課題】速度制御で動作するモータ駆動装置において、バックラッシュ補正を行う手段を提供することを目的とする。
【解決手段】コントローラ2は、モータ駆動装置1からのモータ位置フィードバックパルス113をパルスカウンタ202で受信し、モータ位置203を得る。モータ位置203を位置指令201と減算器204で比較し、位置偏差205を得る。位置偏差205は位置比例制御器206で位置比例ゲイン倍されて速度指令207となる。これをD/A変換器208でアナログ速度指令209に変換し、モータ駆動装置1に出力する。
(もっと読む)
モータ制御方法及び装置、並びにこれを適用したディスク・ドライブ及び記録媒体
【課題】システムに適用される外乱の状態を考慮し、適応的にモータを制御するモータ制御方法及び装置、並びにこれを適用したディスク・ドライブ及び記録媒体を提供する。
【解決手段】モータ制御方法は、モータ制御システムに適用される外乱(disturbance)の状態に従って、モータ制御システムでの周波数応答特性の周波数帯域幅を変更する段階と、モータ制御システムに変更された周波数帯域幅を適用し、モータの回転速度を制御する段階とを有する。
(もっと読む)
作業機械
【課題】オペレータの意に反した大きな加速トルクが生じるのを防止できる作業機械を提供すること。
【解決手段】作業機械としてのパワーショベル1は、旋回電動モータ7にて駆動される上部旋回体9を備えるとともに、上部旋回体9の旋回制御を行う旋回制御装置20が設けられており、旋回制御装置20は、旋回電動モータ7から出力される加速トルクの上限値を旋回リミットトルク指令値として設定する旋回トルクリミット設定手段29を備えている。従って、その上限値を旋回トルクリミット設定手段29にてより小さく変更すれば、上部旋回体9の旋回中に慣性力が急激に減少しても、旋回電動モータ7から出力される加速トルクの急な上昇を防止でき、操作性を向上させることができる。
(もっと読む)
101 - 120 / 670
[ Back to top ]