
Fターム[5H501GG03]の内容
Fターム[5H501GG03]の下位に属するFターム
負荷の検出値をフィードバックするもの (45)
Fターム[5H501GG03]に分類される特許
41 - 60 / 670
モータ駆動装置
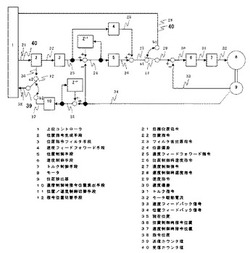
【課題】速度制御から位置制御への切替をシームレスに行い、機械伝達系に衝撃を与えないモータ駆動装置を提供する。
【解決手段】モータ駆動装置から前記上位コントローラ1への伝送遅れ時間の間のモータ移動量と、前記上位コントローラからモータ駆動装置への伝送遅れ時間の間のモータ移動量と、前記上位コントローラ1からモータ駆動装置への伝送遅れ時間の間のモータ移動量とを現在位置35に加算して前期の速度制御時指令位置37とし、速度制御から位置制御への切替時において、前回の前記速度制御時速度指令28から算出される位置偏差量を位置偏差24の初期値とするとともに、前記位置指令生成手段2において、前記位置偏差量を現在位置35に加算したものを位置制御時指令位置36の初期値として設定した後、前記目標位置指令21による位置制御を行うモータ駆動装置である。
(もっと読む)
電気推進システムにおける電動機制御方法

【課題】蓄電池とこの蓄電池を充電する発電機からなるハイブリッド電源を備えた電気推進システムにおいて、蓄電池電圧,電動機受電端電圧の異常低下を簡単かつ低コストに防止する。
【解決手段】電動機(M)6の入力電圧VMを検出器(VD)9により検出し、これが予め設定された制限開始設定電圧VMAを超えたら、予め設定されている回転速度(入力電流)制限線Yをもとに、速度指令制限部13により回転速度(入力電流)制限線を超えない回転速度を求め、これをもとに回転速度を制限して電動機(M)6を運転することで、掲記課題を装置の小型化,軽量化およびコストダウンにより実現する。
(もっと読む)
角速度推定装置
【課題】角周波数が低い領域においても、回転子の位置を推定する技術を提供する。
【解決手段】d軸電圧指令値Vd*からd軸電流Idに基づく電圧降下を減じてd軸誘起電圧edが得られ、q軸電圧指令値Vq*からq軸電流Iqに基づく電圧降下を減じてq軸誘起電圧eqが得られる。d軸誘起電圧edから修正積分器12によって推定d軸磁束φdが得られる。推定d軸磁束φdをq軸誘起電圧eqで除して推定角速度ω0が得られる。推定角速度ω0が積分されて推定位相θが得られる。修正積分器12は、同じカットオフ周波数ωcを有するローパスフィルタ13及びハイパスフィルタ14、及びこれら二つのフィルタの出力を加算して推定d軸磁束φdを出力する加算器16も有している。修正積分器12は更に、推定d軸磁束φdの上限を制限してハイパスフィルタ14に入力するリミッタ15をも備えている。ローパスフィルタ13にはd軸誘起電圧edが入力する。
(もっと読む)
負荷適応型制御ループ切り替え方法及び負荷適応型帰還制御装置
【課題】従来の制御ループの切り替え方法では、制御ループの切り替え時に制御対象回路が不安定になる問題があった。
【解決手段】本発明の制御ループの切り替え方法は、第1の誤差積分値INTG1に第1の誤差値ERR1を加算して第1の誤差積分値INTG1を更新し、第2の誤差積分値INTG2に第2の誤差値ERR1を加算して第2の誤差積分値INTG2を更新し、更新後の第1の誤差積分値INTG1と第2の誤差積分値INTG2とのうち小さな値を示す誤差積分値に基づきPWM信号のデューティ比を決定し、更新後の第1の誤差積分値INTG1とINTG2第2の誤差積分値とのうち小さな値を示す誤差積分値で更新後の第1の誤差積分値INTGと第2の誤差積分値INTG1のうちPWM信号のデューティ比の決定に用いられなかった誤差積分値を更新する。
(もっと読む)
画像形成装置、画像形成装置の制御方法、および画像形成装置の制御プログラム
【課題】装置の小型化を図ることのできる画像形成装置、画像形成装置の制御方法、および画像形成装置の制御プログラムを提供する。
【解決手段】画像形成装置としてのMFPは、縦搬送モータ100と、本体側制御基板200と、センサ1および2とを備えている。縦搬送モータ100において、エンコーダ103は、縦搬送モータ100の回転数に応じた周波数を有するエンコーダ信号405を発生し、センサ信号重畳部113は、センサ1および2の論理状態の入力を受け付ける。センサ信号重畳部113は、センサ1および2の論理状態に基づいて、エンコーダ信号405のデューティ比を変調することにより、エンコーダ信号405にセンサ1および2の論理状態を重畳し、重畳後のエンコーダ信号401を出力する。本体側制御基板200において、センサ信号分離部203は、入力されたエンコーダ信号401を復調することにより、センサ1および2の論理状態を得る。
(もっと読む)
電動モータの制御装置およびその制御方法
【課題】加速性も含めた作業操作上の違和感を低減すること。
【解決手段】作業モードを設定するモード切替部と、設定される作業モードによって予め設定される電動モータの最大出力を取得する作業モード・旋回最大出力変換テーブルTB11と、電動モータの回転速度を検出する回転センサと、前記回転速度と前記最大出力とをもとにトルク制限値Tlimを演算するトルク制限値演算部105と、前記電動モータの加速時に、トルク制限値Tlimによって前記電動モータのトルクを制限するトルク制限手段と、を備える。
(もっと読む)
電動パワーステアリング装置
【課題】操舵系にアシスト力を付与するモータについて、その抵抗値を精確に算出することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、電流値Imおよび電圧値Vmに基づいて外乱オブザーバにより推定誘起電圧EXaを算出する。そして、推定誘起電圧EXaが所定範囲内にあるとき電流値Imおよび電圧値Vmに基づいて抵抗値を算出する。さらに、最後に取得した電圧値Vmよりも前に取得した電圧値Vm(過去電圧値)および最後に取得した電流値Imよりも前に取得した電流値Im(過去電流値)に基づいて外乱オブザーバの演算式を補正する。
(もっと読む)
電動機器のシステム設計支援装置
【課題】総合的に電動機器全体のシステムの設計を行なうことが難しい。
【解決手段】システム設計支援装置は、解析手段10と、プログラム実行手段20と、記憶手段30と、入力手段40と、動作結果と設計要素を選択的に一覧表示する表示手段50と、システム設計モデルを有機的に結合させるモデル結合手段60と、設計要素を調整または変更する変更手段70と、を備える。解析手段10は、リニアモータ6の変動推力Frを減じた推力Fmを演算する推力演算手段11と、変位δを減じた検出位置Xiと検出速度Viとを演算する移動量演算手段12と、位置と速度の誤差を補正した移動指令に従う制御量Hcを演算する制御量演算手段13と、制御量Hcに対応する電流振動Irを減じた駆動電流Iiを演算する駆動電流演算手段14と、指令位置Pjと指令速度Vjを演算する指令値演算手段15と、を含んでなる。
(もっと読む)
電動機の駆動装置
【課題】簡便な手法で機械軸系の捩じり振動を抑制することができる電動機の駆動装置を提供する。
【解決手段】機械負荷1を駆動する電動機2に対する速度基準と電動機2の実速度との偏差がなくなるように、電動機2のトルク基準を得て、電動機2に対するトルク信号を出力する制御部4、を備え、制御部4は、電動機2と機械負荷1とで構成される機械軸系で発生する捩じり振動に対するトルク信号の位相遅れが90度未満となるように設定されるようにした。
(もっと読む)
モータの制御装置及び制御方法
【課題】モータの回転速度が変化する場合でも、安定的に精度よくモータを制御することの可能なモータの制御装置を提供する。
【解決手段】所定の周期でモータの回転量を検出するモータ回転量検出手段と、前記モータ回転量検出手段が前記モータの回転量を検出した回数を計測する計測手段(S2)と、計測値が計測間隔を超えたか否かを判定する計測間隔判定手段(S4)と、計測間隔を超えたと判定された場合、検出されたモータの回転量、計測間隔判定手段により計測間隔を超えたと判定された際に検出されたモータの回転量、及び計測間隔判定手段により計測間隔を超えたと判定されてからの経過時間からフィードバック速度を算出する速度算出手段(S5)と、算出されたフィードバック速度と速度指令値とを比較して、いずれか速い方から計測間隔を算出し、計測間隔判定手段に設定する計測間隔算出手段(S6〜S9)とを備える。
(もっと読む)
圧縮機モータ制御装置
【課題】トルク脈動に対する速度変動により、回転速度・位置推定演算の推定誤差が過大となる状態が発生する。
【解決手段】予め決められた一回転中の複数の各位置において回転速度が限界最低速度を下回った場合の速度補償値を記憶し、記憶された速度補償記憶値により前記複数位置における電流指令を補正する電流指令補正器を備え、回転速度が限界最低速度を下回らないように速度補償を行う。これにより、高調波の影響を抑制し安定した駆動を得られる圧縮機モータ制御装置を提供することができる。
(もっと読む)
電動機の速度制御装置
【課題】比較的容易に電動機の応答速度を変更することができるようにする。
【解決手段】電動機20の回転速度を制御する速度制御装置30は、電動機の回転速度を検出する回転速度検出手段と、電動機の回転速度を制御する制御回路11とを具備する。制御回路は回転速度検出手段によって検出された回転速度の実績値Nfbkが制御回路に入力された指令値になるように電動機を制御する。速度制御装置は、電動機の回転速度の目標値Ntrgが入力されて制御回路に入力すべき指令値を算出する補償制御手段31を更に具備する。補償制御手段は、回転速度検出手段によって検出された回転速度の実績値と回転速度の目標値との偏差が大きくなるに従って大きくなる補正値Rを、目標値に加算したものを修正目標値Nrevとして算出し、算出された修正目標値を指令値として制御回路に入力する。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】高速且つ高精度に、駆動対象を目標停止位置に停止可能とする。
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理を、駆動初期において実行する。一方、駆動対象の現動作状態に基づき、第二制御処理に対応するパターンで駆動対象を減速・停止させるのに必要な搬送量である停止必要量Pn=Pc+Pdを算出する。そして、目標停止位置までの残り搬送量Psが停止必要量Pn以下となった時点で、第一制御処理に代えて第二制御処理を実行する。この動作により、第一制御処理を長めに実行して駆動対象を高速に搬送し、第二制御処理では、上記パターンに対応する目標軌跡に追従するように駆動対象の位置P及び速度Vを制御して、駆動対象を精度よく目標停止位置で停止させる。目標軌跡は、減速時の加速度ピークが、モータで実現可能な限界値−Apに設定されてなる。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】トルク飽和が生じるにもモータを当初定めた速度まで適切に加速可能とする。
【解決手段】モータ制御ユニットは、制御に使用する目標加速度Arを、加速度プロファイルに従う目標加速度Anに設定する一方、トルク飽和によるモータの加速度上限Amを推定し、目標加速度Anが加速度上限Amを超える場合には、その時点以降、目標加速度Arを、加速度上限Amに設定する。また、当初の加速度プロファイルに従う目標加速度Anが加速度上限Am以下となる時点(時点Tx)で速度ωcを設定し、モータ速度が速度ωcに到達した時点(時点T1)で、モータ速度を加速指令時に指定された加速終了時の速度ωfに調整するための新たな加速度プロファイルを、その時点でのモータの運動状態に基づいて設定する。そして、この時点以降には、この新たに設定した加速度プロファイルに従う目標加速度Azを、使用する目標加速度Arに設定して、モータ制御を行う。
(もっと読む)
電動機の脈動抑制装置および電動機の脈動抑制方法
【課題】システム同定モデル誤差を推定することができる電動機の脈動抑制装置を提供する。
【解決手段】インバータのベクトル制御により駆動される電動機(実プラントPn)の軸トルクTnに、トルクリプル補償電流指令値から軸トルク検出値までの周波数伝達関数の逆関数を乗算して外乱トルクを推定する周期外乱オブザーバPDOと、トルクリプル抑制制御開始直前の初期状態時の軸トルクTnとトルクリプル抑制制御開始後に十分トルクリプルが打ち消された最終状態時に、前記PDOにより推定された外乱推定値dI^nを外乱とみなしシステム同定モデルP^nから推定した軸トルク推定値T^nとを比較してシステム同定モデル誤差ΔPnを求める誤差推定器100と、前記誤差ΔPnを格納するメモリー110とを備え、メモリー110内の誤差ΔPnによってPDOのシステム同定モデルP^nを補正する。
(もっと読む)
車両用モータ制御装置
【課題】車両の共振周波数を解消できる車両用モータ制御装置を提供する。
【解決手段】各種センサ7からの車両の状態量に応じて第1のトルク指令値Trefを生成する車両制御装置1と、走行用モータ3の電気角ωから検知できるトルクリプル成分の中で車両共振を発生させる周波数成分を車両共振成分抽出フィルタ24で抽出し、その周波数成分に対してフィードバック制御を行うための共振補償値である第2のトルク指令値Tcmpを生成する車両共振補償演算部23と、第1のトルク指令値Trefから第2のトルク指令値Tcmpを減算してトルク指令値Tref_cmpを生成する加算器20とを備え、当該トルク指令値により走行用モータ3を制御する。これにより、走行用モータ3のトルクリプルによる車両の共振が抑制できる。
(もっと読む)
制御装置
【課題】回転電機の応答遅れが伝達トルク振動の周波数に対して無視できない領域においても、十分な制振効果が得られる制御装置が求められる。
【解決手段】伝達トルク振動を打ち消すトルクを回転電機に出力させる制御装置であって、回転速度振動を抽出する回転振動抽出部と、トルク振動周波数を算出する振動周波数算出部と、位相遅れ回転速度振動を算出する位相遅れ回転振動算出部と、回転速度振動及び位相遅れ回転速度振動を固定座標系で表す固定座標系設定部と、回転速度振動及び位相遅れ回転速度振動を回転座標変換する回転座標変換部と、フィードバック値を算出する回転座標系フィードバック制御部と、フィードバック値を固定座標変換する固定座標変換部と、打消トルク振動の指令値を生成する打消トルク制御部と、を備える。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】一定期間、予め設定されたトルクを出力させて、モータを目標停止位置に停止させることができるモータ制御装置及びモータ制御方法を提供する。
【解決手段】モータ制御装置10は、トルク指令に基づいて、モータMを駆動する電流を出力する電力変換部12と、モータMの速度指令とモータMのモータ速度との偏差に基づいて、トルク指令を生成する速度制御部14と、モータMの速度制御中に、モータMのモータ位置を検出する位置検出器PGの1回転当たりの基準位置を最初に検出した後、モータMを位置制御する定位置停止制御部20とを備える。
(もっと読む)
ミシン及びミシン制御プログラム
【課題】モータのトルク指令値を算出するためのゲイン値を駆動状況に応じて増減することができるミシン及びミシン制御プログラムを提供する。
【解決手段】ミシンのCPUはミシンモータに対する回転速度の指令値Sを取得する(S11)。CPUはミシンモータの回転速度の検出値Nをエンコーダにより取得する(S12)。指令値Sと検出値Nの偏差ΔNを算出する(S13)。CPUはミシンの駆動状況に応じた増減割合で、ミシンモータのトルク指令値Tを算出するためのゲイン値を偏差ΔNの増減に従って増減する(S14〜S17、S21〜S25)。CPUは設定したゲイン値に偏差ΔNを乗じてトルク指令値Tを算出する(S29)。
(もっと読む)
モータ制御装置
【課題】動作中に振動特性が変化する制御対象に対する振動抑制制御の精度を向上できるモータ制御装置を得ること。
【解決手段】モータ1a及び振動可能要素1bを有する制御対象1の動作を制御して、制御対象の動作を動作目標値に追従するようにモデルトルクτaを生成するフィードフォワード制御部111と、モデルトルクに応じてトルク指令τMを発生させる発生部とを備え、フィードフォワード制御部は、制御対象の振動関連情報に応じて、振動特性を表す振動パラメータθを生成する生成部と、振動パラメータに応じて、動特性を模擬した数式モデル121を変更し、モデルトルクから変更された数式モデルにより、制御対象の動作状態を含むモデル変数を演算する第1の演算部と、モデル変数が一定の追従特性で動作目標値に追従するように、振動パラメータに応じて特性を変化させた演算によりモデルトルクを演算する第2の演算部とを有する。
(もっと読む)
41 - 60 / 670
[ Back to top ]