
Fターム[5H501GG03]の内容
Fターム[5H501GG03]の下位に属するFターム
負荷の検出値をフィードバックするもの (45)
Fターム[5H501GG03]に分類される特許
21 - 40 / 670
主軸駆動用モータの制御装置
【課題】主軸にかかる負荷が大きい場合はモータと主軸との間にスリップが発生し、主軸位置検出結果をモータ速度のフィードバック制御に利用するとモータ速度の制御が不安定になるという問題が生じていた。
【解決手段】本発明の制御装置は、位置指令値に従って速度指令値を出力する位置制御部と、前記速度指令値に従って電流指令値を出力する速度制御部と、モータに流れる電流を検出する電流検出部と、電流に基づいてモータの第1速度を推定する第1速度推定部と、センサにより検出される主軸位置に基づいて算出される主軸速度及び変速比に基づいてモータの第2速度を推定する第2速度推定部と、モータ負荷の値を算出する負荷演算部と、を有し、速度制御部は、モータ負荷の値が所定の値以上の場合は第1速度を用い、所定の値未満の場合は第2速度を用いて電流指令値を算出する、ことを特徴とする。
(もっと読む)
電動機制御装置

【課題】駆動機構における慣性モーメント又は慣性質量、及び多慣性モデルのいずれも未知もしくは変動し得る場合でも、各種パラメータを調整することなくロバスト性の高い電動機の駆動制御を可能にする。
【解決手段】電流制御系ループにおいて、慣性変動抑制部3が第1外乱オブザーバ31を用いて推定した電動機200の外乱トルクを、第1トルク指令に加算して第2トルク指令を出力する。また、慣性変動抑制部3において外乱トルクを推定する第1外乱オブザーバ31が、電動機200の電動機速度に対応して駆動機構500の機械共振の影響を抑制した理想電動機の加減速トルク信号を出力する共振抑制モデル43を備えている。第1外乱オブザーバ31が、この理想電動機の加減速トルク信号を利用して外乱トルクを推定することで、慣性変動抑制部3は駆動機構500の機械共振に起因する振動を生じることなく駆動機構の慣性モーメントの変動を抑制する。
(もっと読む)
画像形成装置
【課題】モータ負荷異常検出時であっても、負荷トルクを低減させるモータ駆動制御を行うことにより、一定の利便性・生産性を確保する画像形成装置を提供する。
【解決手段】本発明に係る画像形成装置は、入力された回転速度制御信号に応じて回転速度を切替えるモータと、モータに対し回転速度制御信号を出力する出力手段と、モータの回転速度に応じて線速を調整する調整手段と、モータから該モータが前記回転速度制御信号の回転速度で回転していないことを示す信号を検知する検知手段とを備え、出力手段は、モータに対し、第1の回転速度制御信号よりも低い回転速度で前記モータを駆動させる第2の回転速度制御信号を出力し、調整手段は、出力手段により第2の回転速度制御信号が出力されたとき、該回転速度に応じて画像形成に関する線速を調整する。
(もっと読む)
振動発生装置
【課題】 重心が偏った錘をモータで回転して振動を発生する振動発生装置において、モータが1回転する間の速度変化を効率良くできるように制御可能な振動発生装置を提供する。
【解決手段】 重心が偏った錘が回転軸に固定されたモータの回転速度変化をエンコーダから得て、予め設定された速度変化プロファイルPvと実際の速度情報との差を回復できるようにフィードバック制御が行われる。さらに、モータに発揮させる理想的なトルク変化プロファイルPtが使用され、フィードバックされた補正速度情報がトルク変化プロファイルPtに追従するように、フィードフォワード制御が行われる。これにより、モータを理想的な速度変化で駆動できるようになる。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】演算用モータ抵抗値の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に流れる電流検出値Ieを検出する電流値検出部31と、モータ12に印加される端子間電圧Vtを取得する入力電圧設定部37と、電流検出値Ie及び端子間電圧Vtに対してフィルタ処理を施すフィルタ部40と、モータ12で発生する誘起電圧Eを算出する誘起電圧推定部43と、デューティ比微分値ΔDを算出する変化量算出部41と、フィルタ後電圧値Vtfをフィルタ後電流値Iefで除算してモータ12の今回の抵抗算出値Re(n)を求める抵抗算出部72と、誘起電圧Eが基準値以下であると共に、デューティ比微分値ΔDが基準変化量以下である場合に、今回の抵抗算出値Re(n)に基づき今回の演算用モータ抵抗値R(n)を設定する抵抗設定部73と、を備える。
(もっと読む)
過大速度制御装置
【課題】システム安定性を損なわず、かつ設定回転速度を下げることなく制御できる過大速度制御装置を提供する。
【解決手段】油圧モータ13の容量可変部13aに過大速度制御装置21を連結する。この制御装置21は、回転速度センサ19により検出した回転速度から過大速度制御指令値Vreを演算する過大速度制御指令演算部22と、過大速度制御指令値Vreと操作指令値Vopとの指令偏差を演算して油圧モータ13の容量可変部13aに出力する指令偏差演算部24とを備えている。上記演算部22は、実際のモータ回転速度Vと通常時のモータ設定回転速度Vsとの速度偏差を演算し、実際の速度Vから過大速度制御機能を作動させるONトリガ点と過大速度制御機能を停止させるOFFトリガ点とを判定し、ONトリガ点と判定したときは上記指令値Vreを出力するとともにOFFトリガ点と判定したときは上記指令値Vreの出力を停止する。
(もっと読む)
モータ制御装置およびこれを備える電動パワーステアリング装置
【課題】算出するモータの抵抗値と実際のモータの抵抗値との差をより短い期間で小さくすることのできるモータ制御装置、およびこれを備える電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、ステアリングの操舵状態が保舵状態のとき、過去に算出したモータ抵抗値Rmに応じて算出されるフィルタ値Rfを用いたフィルタ処理により、モータ抵抗値Rmを算出する。また、前回の保舵状態において算出したフィルタ値Rfである前回フィルタ値Rfoldを今回の保舵状態において算出されるモータ抵抗値Rmに反映する補正係数Gを、回転状態のときの電流積算値に基づいて変更する。
(もっと読む)
フィードバック制御系の振動検出装置及び振動検出装置を備えたモータ制御装置
【課題】モータまたは負荷の慣性モーメントの値がずれても振動状態を精度良く検出し、素早く異常を察知して騒音や機械系の損傷等を防止することができるフィードバック制御系の振動検出装置および振動検出装置を備えたモータ制御装置を提供する。
【解決手段】負荷を連結したモータを制御対象とする制御装置の振動検出装置であって、制御装置は、制御対象をフィードバック制御してモータを制御する制御器部と、制御装置の出力の上下限ピーク値とそれらの発生時刻に基づいて、振動の発生を判断する振動状態判断部と、を備えた。
(もっと読む)
モータ速度検出装置およびモータ制御装置
【課題】モータ速度検出装置において、周波数発電コイル出力のサンプリング周波数を任意に設定できるようにする。
【解決手段】モータ速度検出装置は、モータ20の回転により相対的に移動する周波数発電コイル21およびマグネット22を有し、周波数発電コイルからの交流信号をサンプリングして該モータの回転速度を検出する。該装置は、周波数発電コイルから得られる交流信号をA/D変換するA/D変換手段1と、該A/D変換手段からのデジタル信号を時間積分する積分手段2と、該積分手段により得られた積分値が複数の閾値範囲のうちいずれの閾値範囲に入っているかを判定する第1の判定手段3(9)と、積分値の変化が増加か減少かを判定する第2の判定手段3(8)と、第1および第2の判定手段のそれぞれの判定結果の論理積を示す2値化信号を生成する論理積演算手段3(10)とを有する。
(もっと読む)
ショベル
【課題】電動発電機の異常をより柔軟に検出可能なショベルを提供すること。
【解決手段】本発明に係るハイブリッド式ショベルは、エンジン11により発電機として駆動される電動発電機12を備えるショベルであって、電動機として機能する電動発電機12の入力を表す入力物理量を取得する入力物理量取得部300と、入力物理量取得部300が取得する入力物理量に対応する、電動機として機能する電動発電機12の出力を表す出力物理量を取得する出力物理量取得部301と、出力物理量に対する入力物理量の割合に基づいて電動発電機12の異常を検出する電動発電機異常検出部302とを備える。
(もっと読む)
位置決め制御装置
【課題】精密測定装置に振動等が発生した場合に位置決め制御装置の制御ゲインを調整する際、その調整時間の短縮化、及び、ゲイン調整に掛かる労力の軽減化を図ること。
【解決手段】位置決め制御装置100は、位置補償部10、速度補償部20、電流補償部30、設定テーブル40及びゲイン選択手段50を有する。位置補償部10は目標位置及び検出位置の位置偏差を得て、これに基づき目標速度を制御する。速度補償部20は、目標速度及び検出速度の速度偏差を得て、これに比例ゲインKpを掛けた値及び速度偏差の積分に積分ゲインKiを掛けた値の加算値をモータの目標電流として出力する。電流補償部30は、目標電流及びモータの検出電流の電流偏差を得て、これに基づいて駆動電流を制御する。ゲインKp、Kiの設定値の組合せが複数通り設定テーブル40に記憶されており、選択手段50で選択された組合せに各ゲインが書き換えられるようになっている。
(もっと読む)
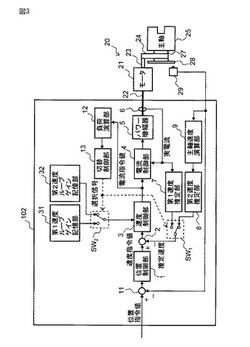
燃焼装置
【課題】設置条件によるファンの負荷の相違に応じて、目標燃焼量に対するファンの回転速度の補正条件を精度良く設定する燃焼装置を提供する。
【解決手段】ガス給湯装置1に電源が投入されたときに、バーナ2への燃料供給を停止した状態でファン4を負荷検出用回転速度で作動させ、負荷検出用回転速度でファン4が作動しているときの電流検出部51による検出電流と、負荷検出用回転速度に対応する基準電流ラインでの通電電流である基準電流との相違度合に応じて、基準電流ラインを補正する基準電流ライン補正部55を備える。
(もっと読む)
制御装置、制御プログラム及び制御方法
【課題】適切な比例ゲインを算出することができる制御装置、制御プログラム及び制御方法を提供することである。
【解決手段】デューティー比に応じた回転速度でモーター16を動作させるための制御信号を生成する制御装置10。制御装置10は、時間T1でデューティー比をD1からD2に変化させて、D1からD2の間の各デューティー比に対応する複数の回転速度R1を得る。制御装置10は、時間T1よりも時間T2でデューティー比をD1からD2に変化させて、D1からD2の間の各デューティー比に対応する複数の回転速度R2を得る。制御装置10は、複数の回転速度R1及び複数の回転速度R2に基づいて、各回転速度R1に対応する比例ゲインKpを算出する。
(もっと読む)
制振制御装置及び制振制御方法
【課題】制御ループの高い安定性を確保することができる制振制御装置を提供する。
【解決手段】車両に設けられたモータを制振させる制振制御装置において、第1フィルタを用いて、車両の車両情報に基づいて、第1トルク目標値を設定する第1トルク目標値設定手段と、モータの回転速度を検出するモータ回転速度検出手段と、第2フィルタを用いて、モータ回転速度検出手段により検出された検出回転速度に基づいて、第2トルク目標値を設定する第2トルク目標値設定手段と、第1トルク目標値設定手段により設定された第1トルク目標値と、第2トルク目標値設定手段により設定された第2トルク目標値とを加算して、トルク指令値を算出する第1加算手段と、第1加算手段により算出されたトルク指令値に基づき、モータを制御するモータ制御手段とを備え、第2フィルタの制御定数は、車両の駆動系の固有振動周波数より低い周波数に基づいて設定されている。
(もっと読む)
故障情報伝達装置、およびモータ装置
【課題】簡易に故障状態を知らせることができる故障情報伝達装置、およびモータ装置を提供する。
【解決手段】故障情報伝達装置は、モータおよびモータ駆動装置の少なくとも一方が故障したとき、その故障の種類を伝達する。故障情報伝達装置は、故障が発生したとき、非正弦波形からなる故障識別信号3aを伝達する伝達部を備え、伝達部は、非正弦波形中の波の数、および非正弦波形の休止期間の少なくとも一方を、故障の種類に応じて異ならせる。
(もっと読む)
車両用駆動制御装置
【課題】駆動系の機械共振を適切に抑制する。
【解決手段】アクセル開度および速度に基づく要求駆動力に応じて走行用モータに対するトルク指令を出力するトルク指令生成部41と、トルク伝達系の固有振動周波数成分を減衰させるようにして、トルク指令に減衰フィルタ処理を行なって処理後のトルク指令を出力するトルク指令ノッチフィルタ42と、処理後のトルク指令に応じたトルクを発生させるように走行用モータを制御する動力指示部と、調整パラメータ演算部43とを備え、調整パラメータ演算部43は、走行用モータの回転数が所定回転数以下かつトルクが所定トルク以上である場合にトルク指令ノッチフィルタ42の減衰フィルタ処理の減衰特性を同定する。
(もっと読む)
モータ駆動制御装置
【課題】共有メモリに調整用データとモニタデータとをこの順に排他的に保存する場合にユーザに特別な操作を要求することなく、自動的に共有メモリへの保存データの切り替えが行えるモータ駆動制御装置を得ること。
【解決手段】データ入出力装置10を用いた制御機能の調整設定時において、スイッチ7に調整用データ取得部5aの出力端と共有メモリ8のデータ入力端とを接続させ、その後、データ入出力装置10が出力する制御機能の調整設定の完了通知に応答してスイッチ7にモニタデータ取得部6の出力端と共有メモリ8のデータ入力端とを接続させるスイッチ切替信号17を発生する手段を備えた。
(もっと読む)
建設機械
【課題】電子制御系の異常判定に係る誤判定及び検出漏れの発生を抑制できる建設機械を提供すること。
【解決手段】旋回体と、旋回体を駆動する電動モータと、操作信号を操作量及び操作方向に応じて出力する操作装置と、操作信号に基づいて生成された制御信号に基づいて電動モータを制御するインバータ装置と、電動モータの速度を検出するための位置センサと、制御信号が規定する電動モータの速度指令V*から速度Vを減じた値の符号と、電動モータの加速度の符号とが異なる状態を第1条件とし、速度指令と速度の偏差が基準値Vthより大きく、かつ、加速度が基準値βthより大きい状態を第2条件としたとき、第1条件及び第2条件のうち少なくとも一方が成立するか否かを判定する第2コントローラとを備える。
(もっと読む)
モータ駆動装置
【課題】速度制御から位置制御への切替をシームレスに行い、機械伝達系に衝撃を与えないモータ駆動装置を提供する。
【解決手段】モータ駆動装置から前記上位コントローラ1への伝送遅れ時間の間のモータ移動量と、前記上位コントローラからモータ駆動装置への伝送遅れ時間の間のモータ移動量と、前記上位コントローラ1からモータ駆動装置への伝送遅れ時間の間のモータ移動量とを現在位置35に加算して前期の速度制御時指令位置37とし、速度制御から位置制御への切替時において、前回の前記速度制御時速度指令28から算出される位置偏差量を位置偏差24の初期値とするとともに、前記位置指令生成手段2において、前記位置偏差量を現在位置35に加算したものを位置制御時指令位置36の初期値として設定した後、前記目標位置指令21による位置制御を行うモータ駆動装置である。
(もっと読む)
モーター駆動方法、モーター駆動装置およびロボット
【課題】ロボットアームなどの被駆動部を高速で動作させることができるモーターの駆動方法、駆動装置およびロボットを提供する。
【解決手段】モーターの駆動トルク計測データと回転数計測データと、を取得する駆動データ取得工程と、前記駆動トルク計測データと前記回転数計測データと、を前記モーターの回転数/トルク特性テーブルと比較する比較工程と、前記比較工程の比較結果において、前記駆動トルク計測データと前記回転数計測データとが、前記回転数/トルク特性テーブルの駆動可能領域境界にある場合、前記モーターの駆動電圧を昇圧させる昇電圧工程と、を備えるモーター駆動方法。
(もっと読む)
21 - 40 / 670
[ Back to top ]