
Fターム[5H501GG03]の内容
Fターム[5H501GG03]の下位に属するFターム
負荷の検出値をフィードバックするもの (45)
Fターム[5H501GG03]に分類される特許
61 - 80 / 670
モータ制御装置
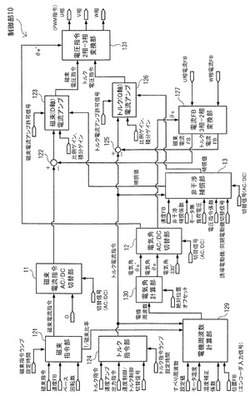
【課題】DCモータ制御及びACモータ制御の両機能を兼用する際に、DCモータとACモータとの切り替えを、小規模及び低コストにて実現する。
【解決手段】制御部10の磁束電流指令AC/DC切替部11は、磁束指令部121から磁束電流指令を入力し、切替信号を入力し、切替信号がACを示す場合、入力した磁束電流指令を出力し、切替信号がDCを示す場合、予め設定されたデータ0の磁束電流指令を出力する。電気角AC/DC切替部12は、電気角計算部130により計算された電気角を入力し、切替信号を入力し、切替信号がACを示す場合、入力した電気角を出力し、切替信号がDCを示す場合、予め設定された固定の電気角330°を出力する。電圧指令2相−3相変換部131は、DCモータ105を駆動する場合、絶対値が等しく逆相となるU相電圧指令及びV相電圧指令、並びにデータ0のW相電圧指令を生成する。
(もっと読む)
モータ制御装置およびモータ制御方法

【課題】動作中の進行方向に対する振動や偏差を抑えることにより、整定時間を短くすることが可能なモータ制御装置およびモータ制御方法を提供することにある。また、本発明により、理想的な軌跡でモータを動作させることができ、さらに、現在の位置を常にモニタリングすることができるため、複数の軸を同期させて動作させることが容易となる。
【解決手段】進行方向に対する振動に大きく影響する加加速度データからの指令波形を生成する手段と、偏差量に応じて、常に加加速度制限しながら今後の指令波形を再生成するリアルタイム実位置制御を行う手段とを備え、これにより高速でモータが動作する際の進行方向に対する振動や偏差を抑える。
(もっと読む)
モータ駆動回路
【課題】モータの駆動回路において、消費電力を少なくすることのできるモータ駆動回路を提供する。
【解決手段】このモータ駆動回路は、外部から入力される回転速度信号VSPに基づいてモータの回転速度を制御するモータドライバを備えたモータに適用される。そして、モータを駆動するとき、第1パルス信号P1と第2パルス信号P2とを形成し、第1パルス信号P1および第2パルス信号P2に基づいて電源動作信号SAを形成するとともに、この電源動作信号SAにより電源回路を動作させて、モータドライバに電力を供給する。さらに、第2パルス信号P2に基づいて回転速度信号VSPを形成し、この回転速度信号VSPをモータドライバへ出力する。
(もっと読む)
ピンチロールの速度制御装置及び速度制御システム
【課題】ピンチロールの速度制御において、操業中にピンチロールモータの速度制御系の不安定化によるハンチングを抑制することを目的とする。
【解決手段】ピンチロールの速度目標値と張力バランス目標値とを入力信号とし、第1のPI制御器を用いてピンチロールの補正速度目標値を出力する主幹制御部と、該補正速度目標値とピンチロールの速度実績値との第1の差分値を求め、該差分値を入力として第2のPI制御器によりピンチロールモータを駆動する電流指令値を求めるドライブ部とを具備し、主幹制御部は、張力バランス目標値と電流指令値との第2の差分値を求め、該第2の差分値を第1のPI制御器に入力し、その出力をローパスフィルタに入力し、該ローパスフィルタの出力と速度目標値とから補正速度目標値を出力する。
(もっと読む)
回転位相検出装置、レゾルバ装置、駆動装置、回転位相検出回路、および回転位相検出方法
【課題】レゾルバを用いて検出する回転位相の温度ドリフトを抑制する。
【解決手段】回転位相検出装置1は、励磁巻線13,14に対する励磁受信巻線15の回転位相θに応じた電圧波形信号を、出力巻線17から出力するレゾルバ6と、出力巻線17に接続され、出力巻線17とは逆の温度特性の抵抗を有する補償抵抗回路21と、出力巻線17および補償抵抗回路21が直列に接続され、出力巻線17から出力された電圧波形信号が補償抵抗回路21を通じて入力され、入力される信号の電圧波形に基づいて回転位相を検出する検出部7とを有する。補償抵抗回路21は、レゾルバ6に設けられる。検出部7は、補償抵抗回路21を通じて入力される信号の電圧の大きさからレゾルバ6の温度を推定し、推定した温度に応じた補償量で、電圧波形信号に基づいて検出した回転位相θ(DTCT)に含まれる温度誤差Δθを補償する。
(もっと読む)
誘導電動機の制御装置及び制御方法
【課題】誘導電動機の回転速度を把握し、その回転速度よりトルク指令値を演算した後、そのトルク指令値で誘導電動機を制御することでトルクモータと同等の回転速度−トルク特性が得られるようにすることができる誘導電動機の制御装置又は制御方法を提供する
【解決手段】誘導電動機の制御装置10は、基本トルク指令値と誘導電動機106の検出速度又は速度推定部112からの推定速度とからトルク指令値を演算するトルク指令値演算部18と、トルク指令値に基づいて、トルク電流指令値を演算するトルク電流指令値演算部19とを備える。
(もっと読む)
モータ速度制御回路
【課題】外付け部品の点数を削減することが可能なモータ速度制御回路を提供する。
【解決手段】モータの回転速度に応じた速度信号に基づいて、回転速度が設定された第1回転速度より速いか否かを判定する第1判定回路と、速度信号に基づいて、回転速度が第1回転速度より高速の設定された第2回転速度より速いか否かを判定する第2判定回路と、第1及び第2判定回路の判定結果に基づいて、回転速度が第1回転速度より遅い場合、回転速度が速くなり、回転速度が第2回転速度より速い場合、回転速度が遅くなるような駆動信号を、モータを駆動する駆動回路に出力する駆動信号出力回路と、を備える。
(もっと読む)
可変バルブタイミング制御システムのモータ回転状態検出系異常診断装置
【課題】モータ駆動式の可変バルブタイミング制御システムにおいて、モータ回転状態検出系の異常診断の誤判定を未然に防止する。
【解決手段】エンジンのクランク軸10の回転速度の1/2の回転速度に対してモータ18の回転速度を調整することでクランク軸10に対するカム軸13の回転位相(カム軸位相)を変化させてバルブタイミングを変化させる。モータ18を駆動するEDU23は、モータ回転位置に応じた位置信号とモータ回転方向に応じた方向信号をECU22に出力する。モータ回転速度が小さくなると、位置信号や方向信号のエッジを検出できないためにモータ回転状態検出系の異常診断を誤判定する可能性がある。この対策として、ECU22は、カム軸位相変化速度とエンジン回転速度に基づいてモータ回転速度を推定し、モータ回転速度が0付近の所定範囲内にあるときに異常診断を禁止する。
(もっと読む)
回転制御装置及び回転制御方法
【課題】 コンパクトな構成で作業台の回転制御の精度の向上を図ることができる回転制御装置及び回転制御方法を提供する。
【解決手段】 回転体の回転に連動して回転するロータリーエンコーダの読取信号を処理して回転ムラ信号と回転ブレ量信号とを生成し、回転駆動部において回転ムラ信号に応じて回転体の回転速度サーボ制御をなすステップと、処理部において回転ブレ量信号に応じてワークに対する位置サーボ制御をなす。
(もっと読む)
モータ制御装置
【課題】制御遅延や電流応答遅延が発生しても遠心力低減効果が低下せず、適切な軸位置指令値を求めるのに大きな負担を必要としないモータ制御装置を提供する。
【解決手段】振れ回り抑制制御部30において、ローパスフィルタLPFによって軸変位検出値dqから軸の回転周波数に同期した直流成分の信号のみを抽出し、周期外乱オブザーバ50によって前記直流成分の信号に基づいて外乱を推定し、前記推定した外乱を抑制する軸変位指令値α*,β*を演算する。そして、前記振れ回り抑制制御部30で演算された軸変位指令値α*,β*を軸支持制御部20に入力する。
(もっと読む)
モータ制御装置
【課題】複数のユニットを有するモータ制御装置において、大きな負担を必要とせずに、モータ軸の振れ回りを抑制する。
【解決手段】軸変位検出値α1,β1,α2,β2から、軸変位検出値の並進運動成分αp,βpと回転運動成分αr,βrとを求め、前記並進運動成分αp,βpと回転運動成分αr,βrのそれぞれについて、ローパスフィルタLPF1によって、軸の回転周波数に同期した直流成分の信号のみを抽出し、周期外乱オブザーバ50a,50bによって前記直流成分の信号に基づいて外乱を推定し、前記推定した外乱を抑制する軸変位指令値の並進運動成分αp*,βp*と回転運動成分αr*,βr*を演算する。そして、軸支持制御部20において、軸変位指令値の並進運動成分αp*,βp*と回転運動成分αr*,βr*に基づいて、各モータの軸変位指令値を算出する。
(もっと読む)
ドア駆動制御装置及びドア駆動制御方法
【課題】逆転暴走状態を誤認することなく正確に検出可能なドア駆動制御装置、及び、従来よりも安全性を向上させたドア駆動制御方法を提供する。
【解決手段】ドア1の駆動用のモータ2に電力を供給する電力変換器14を備え、ドア1の速度検出値と速度指令値とを用いたフィードバック制御により電力変換器14を運転し、ドア1の速度を制御するドア駆動制御装置に関する。速度検出値を用いてドアの加速度を演算する加速度演算手段と、この加速度演算手段から出力された加速度検出値と前記速度検出値とから所定時間後のドアの速度を予測し、その予測速度が正または負の第3の設定速度を超えた場合に、予測速度異常信号を出力する異常判定手段と、を備える。
(もっと読む)
電動機制御装置
【課題】外乱負荷トルクによる速度変動を抑制して安定な運転を実現することのできる交流電動機の速度制御技術を提供する。
【解決手段】速度調整器101と、トルク電流調整器102と、前記トルク電流指令をもとに推定トルク電流を演算するトルク電流換算ゲイン部201と、前記交流電動機の回転速度検出信号をもと推定加速/減速トルク電流を演算する加速/減速電流換算ゲイン部202と、前記推定トルク電流から前記推定加速/減速トルク電流を減算して得られる推定外乱負荷トルク電流にフィルタ処理と外乱負荷トルク電流指令換算ゲインを乗算し推定外乱負荷トルク電流指令を生成する外乱負荷トルクオブザーバゲイン部203と、前記外乱負荷トルクオブザーバゲイン部の出力の変化割合を制限するリミッタ205を備え、前記リミッタにより制限された前記外乱負荷トルクオブザーバゲイン部出力を前記トルク指令に加算する
(もっと読む)
制御装置
【課題】 本発明は、例えばモータに自動車のエンジンの動作を模擬させたシステムにおけるモータの制御等、制御対象物の制御を行なう制御装置に関し、制御系の遅れ時間を高精度に補償した制御を行なう。
【解決手段】 制御対象物の動作速度を第1の角度に変換し、制御系の遅れ時間に相当する時間をその動作速度に応じた第2の角度に変換し、第1の角度と第2の角度とを加算して第3の角度を生成し、その第3の角度を、その制御対象物の制御対象要素を指令値通りに制御するための指令値に変換して、その指令値に基づいて制御対象物を制御する。
(もっと読む)
サーボモータのコイル温度検出装置、およびサーボモータ
【課題】モータ動作時にコイル温度の推定値を正確に行えるサーボモータのコイル温度検出装置、およびサーボモータを提供することを目的としている。
【解決手段】モータに流れる電流値を、前記モータに発生する誘起電圧に基づく回転速度値に基づき補正する電流補正部(101〜103)と、前記モータに印加される電圧の指示値と、前記補正された電流値とを用いて、逐次最小二乗法により、前記モータのコイルの抵抗値を推定する抵抗値推定部(104〜106)と、前記推定された抵抗値に基づき、前記モータのコイルの温度を判別する温度判別部107とを備える。
(もっと読む)
サーボアンプの制御ループゲイン調整方法、プログラム及びロボット制御装置
【課題】ロボット動作中のサーボアンプの電源電圧の変動に対して簡易な制御で制御ループを安定化させる。
【解決手段】ロボットの各関節に設けられたサーボモータに対して外部からの制御指令に応じた該サーボモータの制御量を帰還させて制御ループを形成するサーボアンプの制御ループゲイン調整方法であって、前記制御ループゲインのデフォルト値及び前記サーボアンプの電源電圧のデフォルト値に基づいて、前記制御ループを形成するとともに前記サーボモータの駆動を開始する工程と、前記サーボアンプの電源電圧を検出する工程と、前記制御ループゲインを構成する制御ゲインのうち前記サーボアンプの電源電圧と相関して変化する制御ループゲインを、検出した前記サーボアンプの電源電圧の変化に対して逆方向に変化するように調整する工程と、を備える。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】 剛性の低いベルトを力伝達手段として含む運動機構におけるベルトの弾性変形の補正を行って、軌道と軌跡とのずれ量を小さくできるモータ制御装置及び制御方法を提供する。
【解決手段】 位置指令をプレフィルタ3に通し、その後位置指令と位置フィードバックとの偏差をとり、位置制御部2に通して速度指令を算出する。速度指令と速度との偏差をとり、速度制御部7に通し、トルク指令を算出する。このトルク指令を元に、トルク制御部8内の電力変換器を通してモータを駆動する。また、トルク指令とモータ速度から負荷トルクオブザーバ9により負荷トルクを推定し、この負荷トルクに対し、運動機構の作用点の軌道に応じた弾性変形補償のための補償ゲインを乗算し補償量を求める。この補償量を振動抑制フィルタ13に通して位置偏差に加算する。
(もっと読む)
電動機制御装置
【課題】電動機をより適正に制御する。
【解決手段】モータ10の回転数Nmが大きいほど大きな変化中回転変化量Δθofsを用いて変換器34からの理想角θidを補正して得られる補正後理想角θidmoをインバータ12のスイッチング素子のスイッチング制御に用いる。これにより、電子制御ユニット40に入力された理想角θidをそのタイミングでレゾルバ装置22から出力された検出角θdetに対応する理想角に換算することができ、モータ10をより適正に駆動制御することができる。
(もっと読む)
モータ制御装置、モータ制御方法、プログラム
【課題】 装置やモータの起動直後など、パルス信号の1周期の区間が検出されるまでは精度の良い速度情報を取得することができなかった。一方で、常に1/4周期のパルス信号に基づいて速度情報を得ようとすると、パルス信号に劣化が生じたときに算出される速度情報の精度が良くないため、あまり好ましくない。
【解決手段】エンコーダの両相両エッジをカウントし、1周期に満たない際はカウント値に応じて補間演算を行うことで駆動速度を取得して、高精度なモータ制御を可能とする。
(もっと読む)
電動機制御装置
【課題】 電動機のフィードバック制御部での制御パラメータの自動調整機能を有した好適な電動機制御装置を提供する。
【解決手段】 位置制御部11と速度制御部21とノッチフィルタ部32と電流制御部41とからなる電動機制御装置3において、応答状態測定部71では制御パラメータ調整部72での位置制御部11および速度制御部21の制御パラメータの変更に伴って、電動機6の回転速度などの発振状態を監視し、また、制御パラメータ調整部72では前記制御パラメータを再設定して電動機6を駆動するという作業を前記発振状態が無くなるまで行った後は、このときの前記制御パラメータを保持させる動作を行っている。また、機械振動検知部73は上述の設定動作のたびに電動機6の回転速度などの振動状態を監視し、振動状態を検知した場合には、ノッチフィルタ調整部74において、その振動周波数を検知し、検知した振動成分を減衰させるようにノッチフィルタ部72のノッチ周波数を設定する動作を行うようにしている。
(もっと読む)
61 - 80 / 670
[ Back to top ]