
Fターム[5H505BB07]の内容
交流電動機の制御一般 (51,584) | 目的 (3,865) | 保守、試験 (97)
Fターム[5H505BB07]に分類される特許
1 - 20 / 97
液体抵抗器の劣化診断装置
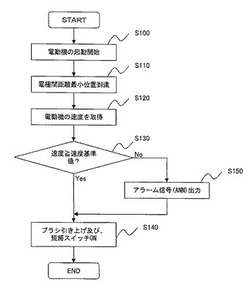
【課題】この発明は、液体抵抗器の劣化診断装置に関し、液体抵抗器の劣化を、機器を分解することなく判断することのできる液体抵抗器の劣化診断装置を提供することを目的とする。
【解決手段】巻線形誘導電動機の速度を検出する速度センサと、前記巻線形誘導電動機の二次回路に接続され前記巻線形誘導電動機の起動に際し電極間距離を徐々に縮めることによりその抵抗値を下げる液体抵抗器と、前記電極間距離が最小となったときに前記速度センサにより検出される電動機速度が速度基準値を下回るか否かを判定する電動機速度判定手段と、前記電動機速度が前記速度基準値を下回る場合にアラーム信号を出力するアラーム信号出力手段とを備える。
(もっと読む)
インバータ装置及びインバータ装置のティーチング方法

【課題】機械式ブレーキを備えるモータ駆動システムについてブレーキ開遅れ時間を得るためのティーチング動作を行う場合に、より精度が高い結果を得る。
【解決手段】実施形態のインバータ装置によれば、設定手段は、制御部がモータの起動に伴って実行するブレーキの開制御をモータの可変速制御と連携して行なう際に、インバータ回路を介して検出される相電流に基づき演算により推定したモータの回転周波数の変化に基づき機械式ブレーキの開制御に使用されるブレーキ制御データを設定する際に、モータが停止して機械式ブレーキが閉じた状態で出力トルクを上昇させるよう制御部に指令を与え、推定されるモータの回転周波数の平均値を求め、その平均値に前記回転周波数の所定の変化分を加えたものを判定周波数として設定する。そして、ブレーキ開指令を出力するとブレーキ開遅れ時間の計測を開始し、モータの回転周波数が判定周波数以上になるまでの時間をブレーキ開遅れ時間として計測し当該時間を記録する。
(もっと読む)
永久磁石同期モータの制御装置
【課題】モータを駆動しつつモータ定数を迅速に同定し、電流検出手段のオフセット値を同定して除去可能とする。
【解決手段】モータの速度及びd,q軸電圧を入力としてd,q軸推定電流を演算する電流シミュレータ9と、d軸検出電流が零となるようにモータを定速制御し、d,q軸推定電流及びd,q軸検出電流から磁束鎖交数の偏差が零となるようにシミュレータ9の自己インダクタンスノミナル値を調整して自己インダクタンスを同定し、d軸検出電流が所定値となるようにモータを制御し、d,q軸推定電流及びd,q軸検出電流から磁束鎖交数の偏差が零となるようにシミュレータ9の電機子抵抗ノミナル値を調整して電機子抵抗を同定し、d,q軸推定電流及びd,q軸検出電流から磁束鎖交数を同定し、d軸推定電流と検出電流との偏差、及び、q軸推定電流と検出電流との偏差から、電流検出手段のオフセット値を同定する同定手段10と、を備える。
(もっと読む)
回転子に永久磁石を用いた電動機の特性判定方法
【課題】回転子に永久磁石を用いた電動機の特性を、例えば整備後に容易に確認することが可能な判定方法を提供する。
【解決手段】電動機11を回転駆動源12に接続し、電動機11の無負荷の発電電圧とその時の回転速度Nを計測し、予め電動機11に設定されている誘起電圧算出式によって算出される基準値Eと比較し、電動機11の良否を判定する。ここで、誘起電圧算出式はE=(ke20)×N、(ke20)={0.0012×(θ−20)+1}×(ke)であり、(ke20)は20℃に補正した誘起電圧定数、0.0012は温度係数、θは電動機11の継鉄の温度、keは電動機11によって設定される誘起電圧定数である。
(もっと読む)
多相回転機の制御装置、及びこれを用いた電動パワーステアリング装置
【課題】 回転角センサの取り付け位置ずれ等による角度誤差を、多相回転機を搭載対象に搭載したままの状態で検出する多相回転機の制御装置を提供する。
【解決手段】 3相モータ(多相回転機)の制御装置であるマイコンは、モータに取り付けられた回転角センサの取り付け位置ずれ等による角度誤差Δθを算出する処理を実行する。まず、d軸およびq軸電流指令値を0アンペアに設定する(S00)。次に、モータの回転軸を外部から回転させ(S10)、逆起電圧によって流れる相電流を検出し(S30)、3相2相変換する(S40)。制御器は、電流検出値が0アンペアになるように電圧指令値Vq、Vdを出力する(S50)。角度誤差算出手段は、電圧指令値Vq、Vdに基づいて角度誤差Δθを算出し(S70)、角度補正値として記憶する(S90)。以後、回転角センサの検出値から補正値を差し引いて補正する。
(もっと読む)
誘導モータ制御装置及び制御方法
【課題】車両の走行用動力源として搭載された誘導モータの駆動制御で用いられるモータ定数を簡易且つ精度よく求めることにより、誘導モータの制御精度を向上可能な誘導モータ制御装置及び制御方法を提供する。
【解決手段】誘導モータ1の制御装置は、拘束状態で第1のパラメータ群を算出する第1のパラメータ群算出部8と、無負荷状態で第2のパラメータ群を算出する第2のパラメータ群算出部9と、前記算出した第1及び第2のパラメータ群を誘導モータの回転数N及び出力トルクと対応付けてマップとして記憶する記憶部10と、第1及び第2のパラメータ群を前記マップから取得して電流指令値を算出する電流指令値算出部8,9とを備えたことを特徴とする。
(もっと読む)
空気調和機の制御装置
【課題】生産ラインにおける試験時間の短縮を可能とする空気調和機の制御装置を得ること。
【解決手段】商用交流電圧を整流する整流回路7と、整流回路7により整流された電圧を平滑して直流母線電圧とする平滑コンデンサ9と、直流母線電圧を任意の周波数の交流電圧に変換して圧縮機モータ12を駆動するインバータ部11と、直流母線電圧から制御電源電圧を生成するトランス10と、制御電源電圧が供給されて動作し、外部からの指令に基づいてインバータ部11を駆動制御する制御部8と、を備え、制御部8は、外部からの圧縮機モータ拘束通電指令に基づいて、圧縮機モータ12が動作しない程度の低トルクを与える圧縮機モータ拘束通電を継続して実施する。
(もっと読む)
モータ駆動装置
【課題】平滑コンデンサを使用することなくモータの絶縁抵抗の劣化を検出する。
【解決手段】平滑コンデンサが無充電状態となった際に、インバータ部21内の下アームスイッチング素子SW6と検出スイッチ32を接続することで、低電圧源33を起電部として、アースG、3相交流モータ4、インバータ部21の下アームスイッチング素子SW6、負側の直流バスN、検出抵抗31及びA/D変換器34の閉回路を形成でき、当該閉回路に流れる閉回路電流Icを検出抵抗31及びA/D変換器34で検出することで、3相交流モータ4の絶縁抵抗の劣化を検出できる。
(もっと読む)
モータの状況検査方法及びモータ特性検査装置
【課題】設備に組み込まれたモータの状況を設備から取り外すことなく検査することが可能なモータの状況検査方法及びモータ特性検査装置を提供する。
【解決手段】三相モータが外力で動いたときに発生する三相の逆起電力波形から電圧ベクトルの変化量を求める電圧ベクトル変化量演算部23と、所定の角度範囲における可動子の速度の変化量を検出する速度変化量検出部21と、電圧ベクトルの変化量及び速度変化量から逆起電力定数を演算する逆起電力定数演算部25と、結果表示部27とを備えたモータ特性検査装置1を用意する。設備に組み込まれたモータから給電線を外した状態で、モータの電機子巻線とモータ特性検査装置1とを電気的に接続し、モータの可動子3bに外力を加えて電機子巻線に三相の逆起電力を発生させ、モータ特性検査装置1の結果表示部27に表示された演算結果に基づいて、モータの状況を判定する。
(もっと読む)
電動モータユニットの検査装置及び検査方法
【課題】モータ制御装置と電動モータが一体となった組込みユニットに対応し、精度が高い電動モータの良否判定を行う。
【解決手段】電動モータユニット10に入力される入力トルク信号を取得し、電動モータMの出力トルクを検出し、電動モータMの温度を検出し、検出された電動モータMの出力トルクを温度で補正し、温度補正された電動モータMの出力トルクの、入力トルクに対する関係を、あらかじめ用意した電動モータの出力トルクの入力トルクに対する基準関係に近づけるように、電動モータユニット10内で電動モータMに供給されるモータ電流を補正する。このために補正に必要な値をEEPROM19に書き込む。
(もっと読む)
回転機の制御装置
【課題】インバータIVのスイッチング素子Swp,Swnの短絡異常に伴うフェールセーフ処理によって消費電力が大きくなる懸念があること。
【解決手段】短絡異常が生じると、リレーSMR1,SMR2をオフすることで、高電圧バッテリ20をインバータIVから切り離す。そして、例えばU相の高電位側のスイッチング素子Swpおよび低電位側のスイッチング素子Swnの双方をオン状態とすることで、上下アームを短絡させる。これにより、車載主機としてのモータジェネレータ10を流れる電流の絶対値を低減する。こうしたフェールセーフ処理を行いつつ、図示しない別の主機にて退避走行を行う。
(もっと読む)
インバータホイストの駆動制御装置及びインバータホイストの駆動制御方法
【課題】電源電圧が低下した場合や電動機の電圧特性により定格速度で出力電圧が飽和した場合でも、比較的簡易な処理で荷重の落下を回避し、安定したベクトル制御が可能なインバータホイストの駆動制御装置及びインバータホイストの駆動制御方法を提供する。
【解決手段】電源電圧低下などによる出力電圧飽和(過変調)を検出したとき、運転速度指令を、所要トルクを出力することができる周波数まで低減することで、誘導電動機2の運転速度を低減する。これにより、低速から高速までの全領域において、ホイストとしての機能を損ねることなく、安全でかつベクトル制御の持つ性能を十分に活用することが可能となる。
(もっと読む)
インバータ制御装置
【課題】インバータ装置を構成する個々のパワー半導体素子の劣化状態を均等化可能で、インバータ装置の長寿命化とメンテナンスの容易化とを図ることができるインバータ制御装置を提供する。
【解決手段】インバータ装置3を構成する各パワー半導体素子2についてのパワーサイクル寿命の劣化状態を推定する劣化状態推定部9と、該劣化状態推定部9にて求められた各パワー半導体素子2についてのパワーサイクル寿命の劣化状態から、パワーサイクル寿命の劣化が最も早いパワー半導体素子と最も遅いパワー半導体素子との電気的な位相差を算出する位相算出部10と、該位相算出部10にて算出された位相差を表示する表示部11を備える。
(もっと読む)
インバータ負荷模擬装置
【課題】インバータと接続された状態において、処理が複雑化するのを回避しつつ相電圧が平衡するように運転することが可能なインバータ負荷模擬装置を提供する。
【解決手段】電圧補正部22は、2相/3相変換部21から出力された相電圧指令を、インバータ負荷模擬装置100の相電圧を各相の間で互いに平衡した状態にするための補正指令へと変換する。ローパスフィルタ7は線間電圧から基本波成分を取り出す。線間電圧検出部6は、ローパスフィルタ7によって取り出された線間電圧の基本波成分を用いて線間電圧を検出する。電圧補正部22は、補正指令と相電圧指令との差としての補正量を算出するとともに、その補正量に対してローパスフィルタ7と同じフィルタ処理を実行する。電圧補正部22は、フィルタ処理後の補正量と線間電圧検出部6によって検出された線間電圧とを用いて線間電圧の変化分を補正する。
(もっと読む)
エレベータを駆動する誘導電動機の2次時定数測定方法およびシステム
【課題】エレベータを駆動する誘導電動機の2次時定数を正確に測定する方法およびシステムを提供する。
【解決手段】先ず、乗りかごを一定速度で走行させるときに誘導電動機の負荷が0となると見積もられたウェイトを乗りかごに積載した状態で、乗りかごを一定速度で走行させている時に、誘導電動機に電力を供給する電力変換器を制御する制御回路における電流指令値を0に切り換え、零電流制御を開始する。この時点における制御回路の出力電圧値をVstartとし、時定数測定の終了の基準となる出力電圧値として、Vstartの1/eの目標電圧値Vendを設定する。次に、制御回路の出力電圧値が目標電圧Vendに達するまで、カウンタの値をインクリメントする。出力電圧値が目標電圧Vendに達した時点におけるカウント値に対応する時間を誘導電動機の2次時定数として求める。
(もっと読む)
インバータ駆動モータの検査診断方法
【課題】インバータ駆動モータの絶縁評価方法を確立して検査診断方法を提供する。
【解決手段】 モータを検査又は診断する際に用いるインバータパルス試験電源のパルス立ち上がり時間が、インバータ駆動時に検査診断対象のモータ端子で観測されるサージ電圧の立ち上がり時間と異なる際には、モータ巻線ターン間にインバータ駆動時に発生するピーク電圧Vmを印加するのに必要な値だけ、前記インバータパルス試験電源のサージ電圧の大きさΔVを高くあるいは低くすることを特徴とする。
(もっと読む)
絶縁劣化検知装置及び車載高電圧系統
【課題】簡易な構成により、絶縁劣化の発生検知及び絶縁劣化箇所の特定を容易に行うこと。
【解決手段】電力ラインL上に設けられ、インピーダンス成分を有するコイル11と、電力ラインL上において、コイル11よりも車載コンポーネント2側に設けられた接続点P1と車体アースとの間に直列的に接続されたコンデンサ12および電圧検出用抵抗13と、コンデンサ12および電圧検出用抵抗13と直列に接続されるとともに、コンデンサ12およびコイル11とで決定される共振周波数よりも高い周波数の電圧を印加する発振源14と、電圧検出用抵抗13の両端電圧を検出する電圧検出部15と、電圧検出部15によって検出された両端電圧に基づいて、車載コンポーネント2の絶縁劣化を判定する判定部16とを具備する絶縁劣化検知装置3を提供する。
(もっと読む)
インバータ制御装置、駆動装置、空気調和機、コンデンサ放電制御プログラム、およびコンデンサ放電制御方法
【課題】コンデンサ放電時にインバータ回路に大電流が流れるのを防止し、かつ短時間でコンデンサ放電を終了する。
【解決手段】インバータ制御装置2は、整流回路RC、メインリレー10、平滑コンデンサC、スイッチング素子Tr1〜6有するインバータ回路30、コンデンサ放電制御部110、電圧検出部120、および基準電圧値Vsと基準電圧値Vsに対応する基準デューティ比Dとを記憶する記憶部130を備える。メインリレー10が開放された場合(コンデンサ放電時)に、電圧検出部120は、平滑コンデンサCの放電電圧値を検出し、コンデンサ放電制御部110は、前記放電電圧値と基準電圧値Vsとに基づいて、基準デューティ比Dを補正した修正デューティ比D’を算出し、スイッチング素子Tr1〜6を修正デューティ比D’で開閉する。
(もっと読む)
電気機械のトルクの妥当性検査の方法、および同方法を実行し、電気機械を制御する機械制御器
本発明は、機械モデルに基づいて計算された電気機械(1)のトルク(TrqEmMdl)の妥当性検査の方法に関する。計算されたトルク(TrqEmMdl)と電気機械(1)の回転数(n)とから、電気機械(1)の電磁出力の第1の値(PwrEmMdl)が求められる。ステータ電流(IsU、IsV、IsW)とステータ線間電圧(UsU、UsV、UsW)とから、ステータ固定の参照座標系におけるステータ電流成分(IsA、IsB)とステータ線間電圧成分(UsA、UsB)が計算される。ステータ電流成分(IsA、IsB)とステータ線間電圧成分(UsA、UsB)とから電気機械(1)の電磁出力の第2の値(PwrEmSens)が求められる。電気機械(1)の電磁出力の第1の値(PwrEmMdl)の、電気機械(1)の電磁出力の第2の値(PwrEmSens)からの偏差が、所定の出力閾値(PwrErrLim)を超えている場合には、機械モデルに基づいて計算された電気機械(1)のトルク(TrqEmMdl)は妥当でないと評価される。  (もっと読む)
(もっと読む)
回転角検出装置の製造方法、回転角検出装置、モータ制御装置及び電動パワーステアリング装置
【課題】製造工程の煩雑化を招くことなく、全域に亘ってより高精度にモータの回転角を検出することができる回転角検出装置の製造方法を提供すること。
【解決手段】無負荷状態で回転するモータに生じた三相の誘起電圧値を座標変換することにより検出されるd軸電圧値及びq軸電圧値に基づいて、モータレゾルバにより検出される回転角θの全域に亘って設定された複数の検出点(θ1〜θn)におけるオフセット値(φ:α1〜αn)を演算する。そして、その各オフセット値を各検出点における補正値Δθとすることにより回転角θの全域に亘る補正データ35を生成し、メモリ33(の不揮発性記憶領域34)に記憶(書込)する。
(もっと読む)
1 - 20 / 97
[ Back to top ]