
Fターム[5H560DA10]の内容
無整流子電動機の制御 (40,007) | 位置検出(回転子) (3,428) | レゾルバ (380)
Fターム[5H560DA10]に分類される特許
41 - 60 / 380
回転電機制御装置
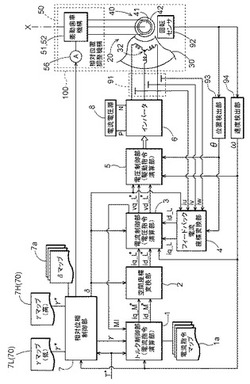
【課題】可変磁束型の回転電機の運転状態や界磁磁束の調整によるロータ表面の磁気抵抗の変化などを考慮して界磁磁束の調整を最適に制御することを可能としつつ、界磁調整のためのロータ間位相の調整量を少なく抑えることができる技術を提供する。
【解決手段】第1ロータ41と第2ロータ42との相対位置を示す位相指令γ*が、目標トルクT*及び回転速度ωに応じて規定された位相マップ70として、界磁磁束が最大となる相対位置を含むように設定された位相範囲内で位相指令γ*が規定された低回転速度域位相マップ7Lと、界磁磁束が最小となる相対位置を含むように設定された位相範囲内で位相指令γ*が規定された高回転速度域位相マップ7Hとを有する。相対位相制御部7は、回転速度ωに基づいて、低回転速度域位相マップ7Lと高回転速度域位相マップ7Hとを切り換えて参照し、位相指令γ*を決定して、相対位置を調整する。
(もっと読む)
モータ駆動制御装置とモータ駆動方法

【課題】三相モータを高速且つ高トルクで駆動可能とする。
【解決手段】三相モータ30の各相の電流から、マグネットトルク電流iqrとリラクタンストルク電流idrとを求めてフィードバック制御を行う。この際、回転角センサ109の測定した回転角θに、制御システムの遅れに相当する回転角を所定の角度deg分加算することにより、遅れ補償制御を行い、モータの応答性を高める。さらに、弱め磁束制御を行って、モータの応答性を高める。制御系の遅れは、無駄時間と一次遅れ系の時定数とで近似する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】トルク変動の発生を抑えつつ、加算角に含まれるモータ回転角速度の推定誤差を補正して、安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】加算角調整演算部は、トルク偏差Δτに基づき第1変化成分が演算される方向に応じて、推定モータ回転角速度(ωm_e)に対応する第1の閾値dθlim1、及び当該第1の閾値dθlim1よりも推定モータ回転角速度(ωm_e)から離れた値を有した第2の閾値dθlim2を設定する。そして、これら二つの閾値(dθlim1,dθlim2)により規定される制限範囲内に加算角θaを制限する。更に、加算角調整演算部は、制御角と実回転角との乖離を示す負荷角を推定する。そして、その負荷角が安定領域外にある場合には、上記第1の閾値dθlim1を、推定モータ回転角速度(ωm_e)から、その想定される推定誤差の最大値に対応する所定値N2離れた値に変更する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】電流指令値制限部は、電流指令上限値演算部が演算する電流指令上限値Ilim以下にγ軸電流指令値を制限する。また、電流指令上限値演算部に設けられた切替制御部は、その制御上の仮想的なモータ回転角としての制御角と実回転角との乖離を示す負荷角(誤差角)θLの(正弦成分である「sinθL」)を推定し、その負荷角θLに基づいて、モータの制御状態を判定する。そして、切替制御部は、その制御状態が不安定化状態にあると判定した場合には、上記電流指令上限値Ilimを、当該制御状態が安定的である場合の値(Ilim_a)よりも高い値(Ilim_b)に変更すべき旨を決定する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】電流指令値制限部74は、電流指令上限値演算部73が演算する電流指令上限値Ilim以下にγ軸電流指令値を制限する。また、電流指令上限値演算部73に設けられた切替制御部75は、演算周期毎のモータ回転角変化量に相当する加算角の基礎成分、即ちトルク偏差Δτに基づく第1変化成分dθτ、及びモータの回転により生ずる誘起電圧(誘起電圧二乗和Esq_αβ)に基づいて、モータの制御状態が安定的であるか否かを判定する。そして、切替制御部75は、その制御状態が不安定であると判定した場合には、上記電流指令上限値Ilimを、当該制御状態が安定的である場合の値(Ilim_a)よりも高い値(Ilim_b)に変更すべき旨を決定する。
(もっと読む)
アクチュエータ、モータ制御システム、及びモータ制御方法
【課題】信頼性又はロバスト性を向上したアクチュエータ、モータ制御システム、及びモータ制御方法を提供する。
【解決手段】アクチュエータは、モータと、モータの回転角を検出する回転角センサと、モータの回転を所定の変位に変換する被駆動機構と、被駆動機構の変位を検出する位置センサと、モータを制御する制御装置と、を含み、制御装置は、正常時における回転角センサの回転角信号及び位置センサの変位信号の相対関係情報を記憶しており、変位信号を取得し、相対関係情報に基づいて回転角を推定した推定回転角信号を演算し、推定回転角信号に基づいてモータを制御する。
(もっと読む)
電動パワーステアリング装置および設定方法
【課題】トルク計などの計測器を用いることなく、装置全体での製造ばらつきなどを考慮して左右の操舵特性をバランスさせることができる技術を提供する。
【解決手段】同軸的に配置された2つの回転軸の相対回転角度に応じた電気信号を出力する相対角度検出装置と、2つの回転軸のいずれか一方の回転軸に駆動力を付与する電動モータと、相対角度検出装置からの出力値と記憶領域に記憶された補正値とに基づいて操舵トルクを検出するトルク検出部と、補正値を設定する中立補正値設定部と、を備え、中立補正値設定部は、電動モータが右方向に予め定められた所定回転速度で回転したときの相対角度検出装置からの出力値である右側出力値と、電動モータが左方向に所定回転速度で回転したときの相対角度検出装置からの出力値である左側出力値とに基づいて補正値を設定する。
(もっと読む)
電動パワーステアリング装置および禁止方法
【課題】モータの回転角度を正確に検出することができない状態でモータにより操舵補助力が与えられることを抑制する技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、電動モータの回転角度に応じた信号を出力するレゾルバと、レゾルバからの出力値に基づいて電動モータの回転角度を算出するモータ角度算出部と、モータ角度算出部が算出した算出回転角度に基づいて電動モータへの目標電流を設定し、電動モータの駆動を制御する制御装置と、を備え、制御装置は、起動時に、電動モータの実際の回転角度と、レゾルバからの出力値が示す回転角度とが所定の位相差とならない異常が発生しているか否かを診断し、異常が発生している場合には電動モータの駆動を禁止する。
(もっと読む)
エレベータの制御装置
【課題】回転センサの温度上昇に伴い検出角度に誤差が生じても、安価で簡単な方法で、検出角度を補正して正常な運転を継続する。
【解決手段】制御装置15は、同期電動機の通電時間を時間積分する時間積分部42と、この電流積分値から同期電動機の発熱に伴う回転センサの温度上昇度を算出する温度算出部43と、温度上昇度に基づいて回転センサの検出角度のずれ量を求め、そのずれ量を補正して同期電動機の駆動系に与える補正部46とを備える。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】固定子コイルに相電流を流してモータを温める際に、同期モータにトルクを発生させず、回転子に加わる逆磁界を低減する。
【解決手段】モータ制御部40は、モータの回転子磁束と平行なd軸磁界成分を発生させるd軸電流目標値の瞬時値に所定しきい値よりも正側の値で、かつ、所定期間におけるd軸電流目標値の平均値がゼロより正側となる値を設定し、回転子磁束と直交するq軸磁界成分を発生させるq軸電流目標値に回転子が回転しない値を設定する目標電流設定部45と、d軸電流目標値とq軸電流目標値に基づいて、モータの固定子のコイルに駆動電流を流す制御を行う駆動制御部と、を備える。
(もっと読む)
電動パワーステアリング装置
【課題】モータ制御の安定性を好適に維持しつつ、効果的にモータ電流を抑制することのできる電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、演算周期毎に、目標操舵トルクτ*と実際の操舵トルクτとの間のトルク偏差Δτに基づいてγ軸電流増減値を演算し、当該γ軸電流増減値を積算することによりγ軸電流指令値Iγ*を演算する。また、加算角演算部41は、上記トルク偏差Δτに基づいて、演算周期毎のモータ回転角変化量に相当する加算角θaを演算し、当該加算角θaを積算することにより、制御上の仮想的な制御角θcを演算する。そして、加算角演算部41は、そのトルク偏差Δτに基づいて、上記加算角θaを低減する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を好適に維持しつつ、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】低減時間調整部は、「負の値」を有するγ軸電流増減値を積算制御部に出力してγ軸電流指令値Iγ**(Iγ*)の低減を許可した時点から、所定時間t_thの経過をもって、新たなγ軸電流増減値の積算によるγ軸電流指令値Iγ**の低減を許可する。そして、低減時間調整部は、γ軸電流指令値Iγ**に基づいて、当該γ軸電流指令値Iγ**の低減調整処理に用いる上記の所定時間t_thを変更する。
(もっと読む)
電動パワーステアリング装置
【課題】センサレス制御を行う場合の電気角の推定精度を向上させる。
【解決手段】電気角推定部110は、操舵トルクTrによりモータの第1推定回転方向d1を推定する第1回転方向推定部111と、誘起電圧ベクトルの移動方向からモータの第2推定回転方向d2を推定する第2回転方向推定部114と、第1推定回転方向d1と第2推定回転方向d2とを選択的に切り替える回転方向修正部115とを備える。回転方向修正部115は、第1推定回転方向d1と第2推定回転方向d2とが相違する場合、誘起電圧ベクトルの向く方向から決まる第2推定電気角と、モータ制御で使用している推定電気角θebとが一致したタイミングで、最終推定回転方向dxを第2推定回転方向d2に切り替える。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】レゾルバの検出角度に関わらず検出精度が向上することが可能なモータ制御装置、モータ制御方法を提供することを目的としている。
【解決手段】微分係数が不連続な点を有する角度検出信号を検出して出力する角度検出部12と、検出された角度検出信号の不連続点を検出する不連続点検出部131と、検出された不連続点近傍の角度検出信号を、不連続点以前のランプ波形の角度検出信号に置換して出力する置換部133と、角度検出部の出力信号または置換された出力信号を、基準値と比較し直線近似により制御信号を算出する制御信号算出部134と、を備える。
(もっと読む)
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の前記操舵系に対する操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備えている。前記相対角度情報補完部は、相対角速度を検出し、検出した相対角速度が少なくとも零近傍の不感帯内となったとき、前記モータ相対角度検出手段により相対角度情報が得られるように前記相対角速度に所定周期毎に符号を変更するオフセット値を加算する相対角速度オフセット処理を行う。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】モータと制御装置の各相特性を相殺して所望特性に変換すると共に、各相特性を一致させることによりトルクや速度等のリップル精度を向上させ、異音の発生がなく操舵に違和感のない電動パワーステアリング装置の制御装置を提供する。
【解決手段】ステアリングシャフトに発生する操舵トルク及び車速に基づいて操舵トルク補助指令値を算出し、操舵トルク補助指令値から各相電流指令値を算出し、各相電流指令値とモータの各相電流値とから算出した電流制御値に基づいてステアリング機構に操舵補助力を与えるモータを制御するようになっている電動パワーステアリング装置の制御装置において、モータと制御装置の各相特性を相殺する特性を有するフィルタを各経路に配設し、モータと制御装置の各相特性を一致させると共に、モータと制御装置の各相特性を所望特性とする。
(もっと読む)
電動パワーステアリング装置
【課題】モータに負荷トルクが印加された状態でモータ電流が極小化する状況を回避して、モータ制御の安定性を好適に維持することのできる電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、演算周期毎に、目標操舵トルクτ*と実際の操舵トルク(τ)との間のトルク偏差Δτに基づいてγ軸電流増減値ηを演算するγ軸電流増減値演算部71と、当該γ軸電流増減値ηを積算する積算制御部72とを備える。そして、電流指令値演算部61は、そのγ軸電流増減値ηの積算値をγ軸電流指令値Iγ*とする。また、電流指令値演算部61は、γ軸電流増減値ηを補正する増減値調整演算部73を備えるとともに、同増減値調整演算部73は、車両が直進状態にあるか否かを判定する。そして、増減値調整演算部73は、車両が非直進状態にあると判定した場合には、γ軸電流増減値ηを「0」に補正して積算制御部72に出力する。
(もっと読む)
モータ制御装置、および、これを用いた電動パワーステアリング装置
【課題】回転角検出手段を用いることなくモータを駆動し、このときのモータの巻線の異常を確実に検出できるモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】マイコン30は、第1駆動手段として機能し、トルクセンサ82により検出した操舵トルクに基づき加算角を演算し、当該演算により導出した加算角に基づきモータ10を制御する。マイコン30は、演算により導出した加算角に基づきモータ10を制御しているとき、第1異常検出手段として機能し、前記加算角、電流センサ81により検出した電流、および、インバータ部20に供給される第1制御信号(PWM制御信号)の値に基づき、モータ10の巻線の異常を検出する。
(もっと読む)
航空機搭載用モータ駆動制御装置及び航空機搭載用モータ駆動制御システム
【課題】制御性能の確保と発熱の抑制とを高い次元でバランスよく達成することができる、航空機搭載用モータ駆動制御装置を提供する。
【解決手段】インバータ23と、指令信号処理部25及びPWM周波数制御部29を有してパルス幅変調制御を行う制御器24とを備える。指令信号処理部25は、第1PWM周波数指令信号の受信時は、所定の一定周波数のPWM周波数にて非同期PWM制御が行われるよう高PWM周波数指令信号を出力する。第2PWM周波数指令信号の受信時は、上記よりも低い周波数にて非同期又は同期PWM制御が行われるように低PWM周波数指令信号を出力する。PWM周波数制御部29は、低PWM周波数指令信号の入力時は、モータ14が所定の回転速度未満のときに非同期PWM制御が行われ、モータ14が所定の回転速度以上のときに同期PWM制御が行われるようにPWM周波数を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置では、q軸電圧が印加されているにも関わらず、q軸電流が第1閾値以下である基準電気角を算出し、前記基準電気角に基づいて異常相を判定する。
(もっと読む)
41 - 60 / 380
[ Back to top ]