
Fターム[5H560DA10]の内容
無整流子電動機の制御 (40,007) | 位置検出(回転子) (3,428) | レゾルバ (380)
Fターム[5H560DA10]に分類される特許
21 - 40 / 380
多相回転機の制御装置、及びこれを用いた電動パワーステアリング装置
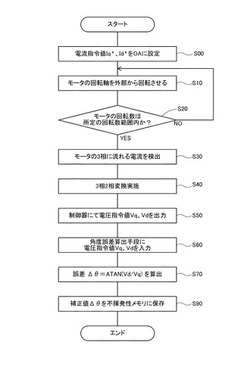
【課題】 回転角センサの取り付け位置ずれ等による角度誤差を、多相回転機を搭載対象に搭載したままの状態で検出する多相回転機の制御装置を提供する。
【解決手段】 3相モータ(多相回転機)の制御装置であるマイコンは、モータに取り付けられた回転角センサの取り付け位置ずれ等による角度誤差Δθを算出する処理を実行する。まず、d軸およびq軸電流指令値を0アンペアに設定する(S00)。次に、モータの回転軸を外部から回転させ(S10)、逆起電圧によって流れる相電流を検出し(S30)、3相2相変換する(S40)。制御器は、電流検出値が0アンペアになるように電圧指令値Vq、Vdを出力する(S50)。角度誤差算出手段は、電圧指令値Vq、Vdに基づいて角度誤差Δθを算出し(S70)、角度補正値として記憶する(S90)。以後、回転角センサの検出値から補正値を差し引いて補正する。
(もっと読む)
回転電機制御システム

【課題】回転電機制御システムにおいて、実変調度となまし変調度との間に乖離が生じても、PWM制御モードと過変調制御モードとの間の制御モード切替に際し、過大な電流が生じることを抑制することである。
【解決手段】回転電機制御システム10は、回転電機20と、回転電機20を駆動する電源回路ブロック12と、電流フィードバックの制御ブロック22と、制御装置40で構成される。制御装置40は、実変調度と、なまし変調度とを求める変調度取得部42と、実変調度となまし変調度の間について予め定めた所定条件に基づいて、PWM制御モードと過変調制御モードとの間で制御モードを切り替える制御モード切替部44を含んで構成される。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(63)を有する。そして、モータの回転角度と、ローパスフィルタのゲインの関係を示すマップ(61)から演算された値により、ローパスフィルタ(63)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(63)に基づいて出力されるモータ回転角速度に基づき、モータの逆起電力により発生する電流を相殺するように、モータに電流を流す非干渉制御を実行する。
(もっと読む)
インバータ装置
【課題】モータの回転位置センサ信号から演算した検出位置と、モータ誘起電圧の位置との位置誤差を検知するモータ印加電圧を出力するモータおよびインバータ装置を得ること。
【解決手段】通電位相θ*となるモータ電流Iu,Iv,Iwを供給してモータ回転位置を引き込み、通電位相θ*と、モータの回転位置センサからの入力信号から演算した検出位置θsとの位相差を検出位置誤差θeとして検知するモータ印加電圧を制御するモータおよびインバータ装置であって、モータの時計回り方向にモータを回転させてモータ回転位置を引き込む通電位相と、モータの反時計回り方向に回転させてモータ回転位置を引き込む通電位相とを出力する初期調整手段を有することを特徴としている。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御が実行される場合に、制御系が不安定になることを抑制できる交流回転電機の制御装置が求められる。
【解決手段】電圧制御部は、第一変調率域ではパルス幅変調制御を実行し、第二変調率域では矩形波制御を実行し、電流フィードバック制御部は、トルク指令に周期的なトルク振動が含まれる場合に、振動周波数の周期関数の特性を有する高調波モデルにより二相電圧指令を算出し、トルク電流演算部は、第一変調率域において変調率が増加するに従ってトルク振動の振幅を減少させ、第二変調率域でトルク振動の振幅をゼロとするように、トルク指令に含まれる前記トルク振動の制限を実行する制御装置。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御の実行が開始される場合に、矩形波の出力電圧波形の位相が急変することを防止できる交流回転電機の制御装置が求められる。
【解決手段】電流フィードバック制御部は、トルク振動の周波数の周期関数の特性を有する高調波モデルを用いた演算の出力値に少なくとも基づいて二相電圧指令を算出し、矩形波制御の実行が開始された場合は、トルク振動の周期に応じて設定された期間内でゼロとなるように、高調波モデルを用いた演算の出力値を徐々に変化させる減衰処理を実行する制御装置。
(もっと読む)
ブラシレスモータおよびこれを備える車両
【課題】ロータの回転が不安定になることが抑制される構成を備え、そのうえでコストの低減に貢献することのできるブラシレスモータおよびこれを備える車両を提供する。
【解決手段】モータは、第1U相コイル32Aおよび第2U相コイル32Bと、第1V相コイル32Cおよび第2V相コイル32Dを有する2相の第1コイル32と、第1U相コイル42Aおよび第2U相コイル42Bと、第1V相コイル42Cおよび第2V相コイル42Dとを有する2相の第2コイル42とを有している。そして、各U相コイル32A,32Bおよび各V相コイル32C,32Dの周方向Wの位置と、各U相コイル42A,42Bおよび各V相コイル42C,42Dの周方向Wの位置とが互いに異なる。
(もっと読む)
モータ駆動装置
【課題】 モータ角度検出器に故障が生じても、モータロータの磁極位置に応じた制御が行えて、モータ駆動が行えるモータ駆動装置を提供する。
【解決手段】 車輪駆動用のモータ6につき、モータ角度検出器36の角度検出値に従い、磁極位置に応じた制御をする基本駆動制御部38を備えたモータ駆動装置20に適用する。車輪回転数検出器24の検出値からモータロータの角度を推測する車輪速度対応モータ角度推測手段46と、センサレス角度検出手段50を設ける。モータ角度検出器36が故障と判別した場合に、基本駆動制御部38による制御を、車輪速度対応モータ角度推測手段46の出力を用いて行わせるセンサ切替え手段49を設ける。車輪回転数検出器24が故障の場合、センサレス角度検出手段50を用いる。
(もっと読む)
ブラシレスDCモータの制御回路の調整装置、調整方法、調整プログラム、及びブラシレスDCモータの制御回路
【課題】ブラシレスDCモータの回転数のばらつきを抑制するブラシレスDCモータの制御回路の調整装置、調整方法、調整プログラム、及びブラシレスDCモータの制御回路を提供することを課題とする。
【解決手段】ブラシレスDCモータ5の制御回路16の調整装置22であって、前記ブラシレスDCモータ5のロータ19を所定の電気角にした際の回転角センサ20の出力値をブラシレスDCモータ5の極対数分取得し、取得した出力値の平均値を、制御回路16が前記回転角センサ20の信号に基づいてブラシレスDCモータ5に給電する電流の位相を調整するオフセット値として制御回路16に設定する処理部23を備える。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】モータの駆動時においても、相開放スイッチのオープン故障を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】異常検出部は、モータ21と駆動回路32との間で一方向への通電が可能、且つモータ21が高速回転していない状態で、判定対象となる特定相の相誘起電圧値が継続して異常判定閾値以下となった場合に、該特定相のリレーFETにオープン故障が発生したと判定するようにした。
(もっと読む)
モータ駆動装置
【課題】 モータ角度検出器に故障が生じても、モータロータの磁極位置に応じた制御が行えて、モータ駆動が行えるモータ駆動装置を提供する。
【解決手段】 車輪駆動用のモータ6につき、モータ角度検出器36の角度検出値に従い、磁極位置に応じた制御をする基本駆動制御部38を備えたモータ駆動装置20に適用する。車輪回転数検出器24の検出信号からモータロータの角度を推測する車輪速度対応モータ角度推測手段46と、モータ角度検出器36の故障を判別するセンサ故障判別手段48とを設ける。故障と判別した場合に、基本駆動制御部38による制御を、モータ角度検出器36による角度検出値に代えて、車輪速度対応モータ角度推測手段46の出力するモータロータ角度を用いて行わせるセンサ切替え手段49を設ける。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】簡易な制御によって、高トルク領域からトルクを減少させる際のトルク追従性を高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域においてトルクを減少する場合には、電圧位相の上限ガード値を通常時からトルク減少方向に変化させる。これにより、電圧位相の変化量が強制的に確保される。
(もっと読む)
車両用操舵装置
【課題】三相ブラシレスモータの駆動回路内の1つのスイッチング素子が短絡故障した場合に、短絡故障が発生したスイッチング素子を特定することが可能となる車両用操舵装置を提供する。
【解決手段】短絡故障したFETがローサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最大値を検出し、検出された各相の相電圧最大値を比較することにより、短絡故障相を特定する。一方、短絡故障したFETがハイサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最小値を検出し、検出された各相の相電圧最小値を比較することにより、短絡故障相を特定する。
(もっと読む)
モータ制御装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(65)を有する。そして、モータ回転角速度を更に微分してモータ回転角加速度を演算するモータ回転角加速度演算手段(61)と、モータ回転角加速度演算手段(61)により演算された値により、ローパスフィルタ(65)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(65)に基づいて出力されるモータ回転角速度に基づき、モータの速度起電力により発生する電流を相殺するように、モータ電圧指令値を定める非干渉制御を実行する。
(もっと読む)
電動パワーステアリング装置
【課題】3相電動モータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続できる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて3相電動モータ12を駆動する。その際、操舵トルク及び前記3相電動モータ12で発生する操舵補助トルクの和と外力との釣合い時に、前記異常時相電流指令値を低下させる電流指令値補正手段を備えている。
(もっと読む)
車両
【課題】コンバータおよびインバータを含むモータ駆動回路を備えた車両において、駆動回路の共振に起因する直流電源の過熱を適切に抑制する。
【解決手段】コンバータおよびインバータを含むモータ駆動回路を制御する制御装置は、コンバータの上アームオン制御中(非昇圧中)である場合(S10にてYES)で、かつモータ回転速度Nが共振回転速度領域に含まれる場合(S11にてYES)で、かつ電流Ibの2乗値が許容値以上である場合(S12にてYES)、インバータの矩形制御の実行を禁止する(S13)。一方、上アームオン制御中でない場合(S10にてNO)、モータ回転速度Nが共振回転速度領域に含まれない場合(S11にてNO)、電流Ibの2乗値が許容値未満である場合(S12にてNO)の少なくともいずれかの場合、制御装置は、矩形制御の実行を許容する(S14)。
(もっと読む)
モータの磁極位置推定方法
【課題】磁極位置推定結果が真値に対して電気角90度以上ずれていた場合においても、不安全動作を引き起こすことのない磁極位置推定方法を提供する。
【解決手段】仮の磁極位置を基準に電気角半周期をN分割した位相に電流を印加し、そのときの移動方向D(+,0,−)を判定するステップ1と、移動方向の符号が反転する電気角領域を2分割した位相に電流を印加し、そのときの移動方向D1を判定するステップ2と、移動方向が+から0および0から−に変化する電気角領域をそれぞれ2分割した位相に電流を印加し、そのときの移動方向D2を判定するステップ3と、移動方向が0となる電気角領域の中間点を発生電磁力が零となる位相と決定するステップ4と、発生電磁力が零となる位相から90°ずらした位相を発生電磁力が最大となる位相と決定するとともに電流を印加し、その時の移動方向D3を判定するステップ5とを備える。
(もっと読む)
モータ制御装置
【課題】電圧指令値の制限を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI演算値を演算するためのPI制御部と、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部と、PI制御手段により演算されたPI演算値と、非干渉化制御量演算部により演算された非干渉化制御量とを加算する加算部と、加算部の加算結果を制限し、制限した制御量をモータ電圧指令値として出力するリミッタと、モータの回転角速度と所定のゲインマップに基づき、目標電流ゲインを演算するゲイン演算部とを備え、ゲイン演算部によって演算された目標電流ゲインをdq軸目標電流に乗じて、モータのdq軸目標電流を制限する。
(もっと読む)
モータ制御装置
【課題】電流によるインダクタンス変動に追従した電流指令を生成して、トルク制御の精度を向上させる。
【解決手段】電流指令ベクトルの向きを示す電流位相角βrefとトルク指令Trefとを入力し、電流位相角βrefの示す方向を向く複数の電流指令ベクトルのうち、トルク指令Trefに対応する総合トルクを発生させ得る電流指令ベクトルを示すd軸電流指令Id及びq軸電流指令Iqを生成する電流指令生成部24を備え、モータに流れる電流値に応じて変化するd軸及びq軸のインダクタンス(Ld,Lq)を電流値Iaに関連付けたインダクタンス情報Da3を予め設定しておき、d軸及びq軸の電流指令(Id,Iq)を生成するにあたり、既に出力したd軸及びq軸の電流指令(Id,Iq)によってモータに流れたとみなせる電流値Iaに対応するd軸及びq軸のインダクタンス(Ld,Lq)を用いてd軸及びq軸の電流指令(Id,Iq)を生成する。
(もっと読む)
モータ制御装置
【課題】モータトルクの変動を緩慢にすることができ、操舵フィーリングを向上させることができるモータ制御装置を提供する。
【解決手段】速度指令値設定部21は、トルクセンサ1によって検出される操舵トルクThおよび車速センサ2によって検出される車速Vsに応じたモータトルク(アシストトルク)をモータ5から発生させるためのq軸電流指令値に対応したロータ回転速度を、速度指令値ω*として設定する。速度偏差演算部22は、速度指令値設定部21によって設定された速度指令値ω*と、速度演算部34によって演算されたロータ回転速度ωとの偏差(ω*−ω)を演算する。速度制御部23は、速度偏差演算部22によって演算された偏差(ω*−ω)に対して比例積分演算(PI演算)を行なうことによって、q軸電流指令値Iq*を演算する。
(もっと読む)
21 - 40 / 380
[ Back to top ]