
Fターム[5H560DA10]の内容
無整流子電動機の制御 (40,007) | 位置検出(回転子) (3,428) | レゾルバ (380)
Fターム[5H560DA10]に分類される特許
81 - 100 / 380
車両操舵装置用電動モータユニットの製造方法
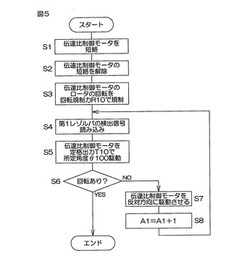
【課題】電動モータのゼロ点位置とセンサのゼロ点位置との間のオフセット値を容易に求めることのできる車両操舵装置用電動モータユニットの製造方法を提供する。
【解決手段】伝達比制御モータのロータのゼロ点位置と第1レゾルバのゼロ点位置との間のオフセット値A1を設定するようになっている。具体的には、第1レゾルバを用いたフィードバック制御により、伝達比制御モータが定格出力を発生するように伝達比制御モータを駆動させる(ステップS5)。このとき、伝達比制御モータが定格出力で回転しないときには(ステップS6でNO)、オフセット値A1を変更する(ステップS8)。一方、伝達比制御モータが定格出力で回転したとき(ステップS6でYES)には、オフセット値A1の設定を完了する。
(もっと読む)
制御装置

【課題】矩形波制御に基づく制御の実行時に処理負荷を適切に低減することが可能な制御装置を実現する。
【解決手段】制御モード決定部20と、電圧指令値決定部33,43と、制御信号生成部23と、制御モード決定部20により決定された制御モードがパルス幅変調制御モードである場合に、制御信号生成部23の演算周期を、キャリア周期の1/2に設定された基準演算周期のN倍(Nは1以上の整数)の第一周期に設定するとともに、電圧指令値決定部43の演算周期を、第一周期のM倍(Mは2以上の整数)の第二周期に設定する演算周期設定部21と、を備え、演算周期設定部21は、制御モード決定部20により決定された制御モードが矩形波制御モードである場合に、電圧指令値決定部33の演算周期及び制御信号生成部23の演算周期の双方を、第二周期に設定する。
(もっと読む)
制御定数の決定方法及び電動機制御装置
【課題】矩形波制御のトルクリップルへの対応を考慮するとともに、電動機のトルクフィードバック制御系の安定性及び応答性を考慮した、制御定数の決定方法を提供する。
【解決手段】トルクフィードバック制御器は、トルク指令値に対する、ローパスフィルタの処理を行った電動機の出力トルクのトルク偏差を算出し、比例積分制御を行って電圧位相を算出する制御器であり、電圧位相の変化に対する出力トルクの傾きであるトルク位相傾きを電動機の伝達関数と決定するステップと、一巡伝達関数のゲイン余裕及び位相余裕が確保されるような積分ゲインの第一の決定条件を導出するステップと、閉ループ伝達関数の応答性が、所定の応答性以上に速くなるような積分ゲインの第二の決定条件を導出するステップと、積分ゲインを、第一の決定条件及び第二の決定条件の双方を満たすように決定するステップと、を備える。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】インバータを用いた交流電動機制御において、効率を低下させることなくインバータのスイッチングによるサージ電圧を抑制する。
【解決手段】交流制御指令(Vu)とキャリア信号(Vcw)との電圧比較に基づいて、インバータ各相のスイッチング素子のオンオフが制御される。交流制御指令(Vu)は、三相変調のための本来の交流電圧指令(Vu♯)に、3次高調波電圧(Vuh)を重畳することによって得られる。3次高調波電圧(Vuh)は、相電流の特定タイミング(tp1、tp2)を含む所定の電流位相期間(T1)において、当該相でのスイッチング素子のオンオフが固定されるように設定される。
(もっと読む)
モータ駆動制御装置及びこれを使用した電動パワーステアリング装置
【課題】高回転・高電流時に誘起電圧の歪みによる誘起電圧補償誤差が著しく大きくなる場合に、誘起電圧補償誤差を低減させるようにしたモータ駆動制御装置及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】3以上の相数nの電動モータ12を駆動するモータ駆動制御装置であって、前記電動モータを駆動する電流指令値を演算する電流指令値演算部82と、前記電動モータのモータ角度を検出するモータ角度検出部13と、前記電動モータのモータ角速度を検出するモータ角速度検出部80と、前記モータ角速度で回転するd−q座標に沿って演算されたd軸電流及びq軸電流値の少なくとも一方と、前記モータ角速度及び前記モータ角度とに基づいて補償用誘起電圧を演算する補償誘起電圧演算部84とを備え、前記電動モータの誘起電圧を前記補償誘起電圧演算部で演算した補償用誘起電圧でフィードフォワード補償する。
(もっと読む)
電動機の駆動制御方法
【課題】モータが負荷保持停止位置で停止する時間を各相コイルで均一になるように駆動制御することで、各相コイルの発熱温度を均一化させた電動機の駆動制御方法を提供する。
【解決手段】制御回路7はモータコイル3に通電状態で、かつロータ2が負荷保持状態で回転停止させたロータ2の回転停止位置である負荷保持停止位置を、前回ロータ2が回転停止した負荷保持停止位置に対して電気角で((180/n)°;nは相数であり、2以上の整数)だけ所定回転方向にロータ2を回転させた位置で停止させる。
(もっと読む)
電動パワーステアリング装置
【課題】構成簡素且つ信頼性の高い異常判定を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】ECU11は、モータ制御信号出力手段として、同一の電流フィードバック演算を実行する独立した二つのマイコン21a,21bを備える。また、各駆動回路22u,22v,22wを構成する二列のスイッチングアームSA1,SA2は、それぞれ、上記各マイコン21a,21bの何れかと関連付けられるとともに、その関連付けられた各マイコン21a,21bの出力するモータ制御信号Smcu,Smcv,Smcwのみに基づいて、独立に作動する。そして、各マイコン21a,21bは、その電流フィードバック演算における過大な電流偏差の発生を監視することにより、システムの異常判定を実行する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】実回転角に基づく回転角速度検出を行うことなく、精度よく、電力供給経路における通電不良の発生を検出することが可能なモータ制御装置を提供すること。
【解決手段】通電不良検出部は、誘起電圧二乗和Esq_αβが、所定の閾値E1を超えるか否かを判定する(ステップ602)。また、モータ回転角速度推定値ωm_eが所定の閾値ω1よりも低いか否かを判定する(ステップ603)。そして、その誘起電圧二乗和Esq_αβが最高速回転状態に対応する最大領域にあるにもかかわらず(Esq_αβ>E1、ステップ602:YES)、モータ回転角速度推定値ωm_eは非回転状態を示す最小領域にある(ωm_e<ω1、ステップ603:YES)という矛盾を検知した場合に、何れかの相に通電不良の発生を示す異常があると判定する(ステップ604)。
(もっと読む)
モータ制御装置
【課題】直流電源に接続されたインバータ及び平滑コンデンサと、インバータで駆動される交流モータとを備えたモータ制御システムにおいて、交流モータで電気エネルギを消費して平滑コンデンサの電荷を放電する際に交流モータの意図しない回転を抑制する。
【解決手段】平滑コンデンサ33に蓄えられた電荷を放電する際に、ロータ回転位置センサ34で検出したロータ回転位置と目標位置との偏差を小さくするように交流モータ12の指令電圧ベクトルを制御する回転位置F/B(フィードバック)制御を実行する。その際、放電開始時に回転位置センサ34で検出したロータ回転位置を目標位置として設定することで、回転位置F/B制御によって、交流モータ12のロータ回転位置を放電開始時のロータ回転位置付近に維持する。これにより、交流モータ12をほとんど回転させないようにすることが可能となり、交流モータ12の回転による不具合を確実に防止する。
(もっと読む)
ブラシレスモータ制御方法及びブラシレスモータ制御装置
【課題】正弦波駆動される線間誘起電圧が正弦波のブラシレスモータにて、電流量の変動に関わらずトルクリップルの低減を図る。
【解決手段】線間の誘起電圧が正弦波波形となる複数相の電機子巻線を備えたステータと、永久磁石を備えたロータとを有してなるブラシレスモータ3にて、電機子巻線に対し正弦波波形の駆動電流を供給する。電機子巻線に生じる誘起電圧の高調波成分と、誘起電圧の基本波と高調波成分との間の位相差を駆動電流に含ませる。巻線電流量と高調波成分含有率、巻線電流量と位相差の関係を予め把握して制御マップ58を作成し、電流指令部51に配置する。電流指令部51には、ロータ回転位置情報とロータ回転数情報及びモータ負荷情報に基づいて供給電流量を算出する供給電流量算出部52と、算出された電流量と制御マップ58に基づいて駆動電流を制御する電流波形制御部59を設ける。
(もっと読む)
モータ制御装置
【課題】モータジェネレータの減磁と電流センサの異常とを識別する。
【解決手段】電流指令値Id*,Iq*と電流センサ125で検出された電流値Id,Iqとの偏差に応じて電圧指令値Vs,Vqを生成しMG2を駆動する。制御モード判定器140gは、Vqが所定のしきい値より低下したか否かを判定し、低下した場合にはさらにVqの挙動を監視し、Vqが定常的であればMG2の減磁であると識別し、振幅変動があれば電流センサ125の異常と識別する。
(もっと読む)
電動機の制御装置および電動機制御システム
【課題】キャリア周波数の切り替わり時の外乱成分の誤推定を抑制し、電流応答特性の低下を抑制することである。
【解決手段】制御ユニットは、キャリアのキャリア周波数に準じた周期、具体的には、キャリアの山と谷とのそれぞれのタイミングで制御演算を行っている。そして、制御ユニットを構成する外乱推定部は、キャリア周波数が切り替えられた場合、このキャリア周波数が切り替わった際の制御演算よりも1周期後の制御演算において制御演算周期に依存する外乱推定用の制御定数の更新を行う。
(もっと読む)
電動機駆動装置、および、それを用いた電動パワーステアリング装置
【課題】断線故障箇所を特定可能な電動機駆動装置を提供する。
【解決手段】電源リレー61、62を導通状態となるように制御したとき(S101)、導通状態となるように制御された第1電源リレー61および第2電源リレー62よりもモータ2側に電力が供給されていないと判断された場合(S104:YES)、電源リレー61、62自体の故障ではなく、第1電源リレー61および第2電源リレー62とバッテリ55との間の配線56が断線していると特定する(S105)。これにより、故障箇所を適切に特定することができる。この場合、第1電源リレー61および第2電源リレー62とバッテリ55との間の配線56を交換すればよいので、電動機駆動装置1の分解、精査を行う必要がなく、故障箇所の特定に係る工数を低減することができる。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】回転角速度検出を行うことなく、精度よく、電力供給経路における通電不良の発生を検出することのできるモータ制御装置を提供すること。
【解決手段】通電不良検出部は、通電状態にあるべき特定相(X=U,V,W、|Ix*|>I2)の相電流値が非通電状態を示す値(|Ix|<I1)であり、且つ他相の相電流値が通電状態を示す値(|Iy|>I3)である場合には、その特定相に通電不良の発生を示す異常があると判定する。
(もっと読む)
ハイブリッド車両
【課題】走行に悪影響を及ぼすことなく、磁極位置補正量を求める学習処理を行う行うことが可能なハイブリッド車両を提供する。
【解決手段】位相補正器30は、内燃機関ENGが駆動し、第1クラッチC1が接続状態であり、且つ第1噛合機構SM1により第1入力軸4と出力軸3aとが選択的に連結されて、当該車両が走行する第1の走行状態では、磁極補正角θofsを第1の学習処理により求める。位相補正器30は、内燃機関ENGが駆動し、第2クラッチC2が接続状態であり、且つ第2噛合機構SM2により第2入力軸5と出力軸3aとが選択的に連結されて、当該車両が走行する第2の走行状態では、磁極補正角θofsを第2の学習処理により求める。
(もっと読む)
電動機制御装置及び制御方法
【課題】電動機を駆動するインバータを用いて、自動で磁極位置センサ信号の補正を行う。
【解決手段】磁極位置推定2は、回転子に電気的突極性を有する電動機1に、前記回転子の磁極位置検出用の高周波電圧または電流をインバータ6を介して供給し、電動機1の応答電流または電圧を測定することで、電動機1の回転子磁極位置を推定する。磁極位置センサ3は電動機1の磁極位置を検出し、磁極位置検出器4は磁極位置センサ3の出力信号から磁極位置を求める。初期位置補正器5は、磁極位置推定器2からの前記磁極位置推定値と、磁極位置検出器4により求められた磁極位置との差分を求め、この差分を補正値として提供する。インバータ6は初期位置補正器5から提供される補正値を用いて、磁極位置検出器4から得られる磁極位置信号を補正し、補正された磁極位置に基づいて電動機1を駆動制御する。
(もっと読む)
ブラシレスモータの回転位置検出装置
【課題】レゾルバを搭載したブラシレスモータの回転位置を、簡単な構成で、精度よく検出するブラシレスモータの回転位置検出装置を得る。
【解決手段】回転位置検出装置は、ブラシレスモータ1に搭載されたレゾルバ2と、モータ制御装置16から構成される。モータ制御装置16はレゾルバ2に対して励磁信号を出力し、レゾルバ2から出力される正弦波信号と余弦波信号をA/D変換器9で交互にアナログ/デジタル変換することでモータの回転位置を演算する。
(もっと読む)
モータ制御装置
【課題】三相ブラシレスモータの駆動回路内の1つのスイッチング素子が短絡故障した場合に、三相ブラシレスモータが負荷となる負荷領域を特定することができるモータ制御装置を提供する。
【解決手段】V相のローサイドFET31VLが短絡故障している場合には、負荷領域特定部41は、短絡故障相(この例ではV相)の相電圧が、正常相(U相、W相)のいずれかの相電圧より大きくなるロータ回転角(電気角)領域を、負荷領域として特定する。一方、
V相のローサイドFET31VLが短絡故障している場合には、負荷領域特定部41は、短絡故障相の相電圧(この例ではV相)が、正常相(U相、W相)のいずれかの相電圧より小さくなる電気角領域を、負荷領域として特定する。
(もっと読む)
永久磁石モータの制御装置
【課題】本発明は永久磁石モータの制御装置に関し、リラクタンストルクが存在し、誘起電圧波形が矩形波(誘起電圧歪み)である永久磁石モータのトルクリプルを抑制することを目的とする。また、トルクリプルの「リプル成分」と「直流成分」とを所定の関係で任意に制御することが可能で、高精度なトルク制御特性を実現する。
【解決手段】上位から与えられるq軸(トルク軸)の電流指令値に、正弦上の信号を重畳し、該電流指令値に従い、電力変換器の出力電圧を制御する。q軸の電流指令値に加算する重畳信号の演算は、永久磁石モータの回転座標系のd軸およびq軸の誘起電圧係数の脈動成分情報と、d軸およびq軸の電流指令値と、d軸の誘起電圧係数の平均値と、d軸およびq軸のインダクタンス値を用いて、正弦波状の重畳信号を演算し、前述のq軸の電流指令値に加算する。
(もっと読む)
電動パワーステアリング装置およびこれに用いられる電動機駆動制御装置
【課題】駆動電圧の飽和により生じる電動機のトルクリップルを抑制し、所定のトルクを維持して軽快な操舵フィーリングを実現する。
【解決手段】q軸目標電流設定手段21は、操舵トルクセンサTSからの操舵入力信号と車速センサVSからの車速信号とに基づいてq軸電流指令値を生成する。このq軸電流指令値とフィードバックされたq軸実電流とが加算されたq軸電流(トルク電流)によって電動機8は所定のトルクを発生する。一方、d軸補正電流設定手段38aは、電圧飽和度算出手段から出力された電圧飽和度(デューティ比=電動機の駆動電圧/電源電圧)に応じて界磁弱め電流(d軸電流)を設定する。これにより、電圧飽和度が高くなったときは、所定のトルク電流で一定トルクを維持したまま、電圧飽和度を下げることにより電流の歪み(高調波成分)が低減でき、トルクリップルが抑制される。
(もっと読む)
81 - 100 / 380
[ Back to top ]