
Fターム[5H560DC13]の内容
無整流子電動機の制御 (40,007) | その他の検出 (3,633) | 電気的変量を検出するもの (2,636) | 電圧 (880)
Fターム[5H560DC13]に分類される特許
41 - 60 / 880
電動パワーステアリング装置
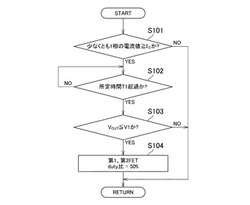
【課題】インバータ装置を構成しているスイッチング素子に過電流が流れた場合でも、昇圧回路を構成するスイッチング素子を保護することができる電動パワーステアリング装置を提供すること。
【解決手段】インバータ装置に流れる少なくとも1相以上の電流値が所定値1(I0)以上になった場合(ステップ、S101:YES)が、所定時間T1以上経過(ステップ、S102:YES)し、かつ、出力電圧検出手段から検出した出力電圧が所定値2(V1)以下になった場合(ステップ、S103:YES)には、第1および第2のスイッチング素子のオン/オフ比を50%に制限する(ステップ、S104)。昇圧回路の第1、および第2のスイッチング素子のオン/オフ比を50%に制限するので、昇圧回路内に流れる電流の急激な増加を抑えることができる。
(もっと読む)
インバータ制御装置およびこれを用いた電動圧縮機、並びに電気機器

【課題】 ブラシレスDCモータの運転制御を行うセンサレス型のインバータ制御装置において、ブラシレスDCモータの脱調停止を有効に抑制し、より安定で信頼性の高い運転制御を実現可能とする。
【解決手段】 インバータ制御装置20の駆動制御器231は、インバータ回路部21の出力電圧が予め設定される閾値以上であり、かつ、回転速度の検出値が目標値より小さい基準値以下である場合に、スイッチング素子の転流を、位置検出転流信号に基づく制御から強制同期転流信号に基づく制御に切り換える。また、インバータ制御装置20の出力電圧制御器232は、駆動制御器231が強制同期転流信号に基づいてスイッチング素子の転流を制御していれば、位相差検出器234による位相差に基づいて出力電圧制御信号を変化させる。
(もっと読む)
回転機の制御装置
【課題】デッドタイム付与後の実際のスイッチング状態の切替タイミングが複数のレッグ間で重なることで、サージ電圧が大きくなるおそれがあること。
【解決手段】ノルム設定部30では、要求トルクTrと電気角速度ωとに基づき、インバータINVの出力電圧ベクトルのノルムを設定する。位相設定部26では、推定トルクTeを要求トルクTrにフィードバック制御するための操作量として位相δを設定する。操作状態設定部34では、ノルム設定部30によって設定されたノルムVnと、位相設定部26によって設定された位相δとに基づき操作信号を生成してインバータINVに出力する。操作状態設定部34には、デッドタイム付与後における実際のスイッチング状態の切り替えが複数レッグで同時になされない波形が記憶されている。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、実変調度となまし変調度との間に乖離が生じても、PWM制御モードと過変調制御モードとの間の制御モード切替に際し、過大な電流が生じることを抑制することである。
【解決手段】回転電機制御システム10は、回転電機20と、回転電機20を駆動する電源回路ブロック12と、電流フィードバックの制御ブロック22と、制御装置40で構成される。制御装置40は、実変調度と、なまし変調度とを求める変調度取得部42と、実変調度となまし変調度の間について予め定めた所定条件に基づいて、PWM制御モードと過変調制御モードとの間で制御モードを切り替える制御モード切替部44を含んで構成される。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御の実行が開始される場合に、矩形波の出力電圧波形の位相が急変することを防止できる交流回転電機の制御装置が求められる。
【解決手段】電流フィードバック制御部は、トルク振動の周波数の周期関数の特性を有する高調波モデルを用いた演算の出力値に少なくとも基づいて二相電圧指令を算出し、矩形波制御の実行が開始された場合は、トルク振動の周期に応じて設定された期間内でゼロとなるように、高調波モデルを用いた演算の出力値を徐々に変化させる減衰処理を実行する制御装置。
(もっと読む)
駆動装置および電動車両
【課題】パルス幅変調制御によるインバータの制御から矩形波制御によるインバータの制御への切替時にインバータの制御性が低下するのを抑制する。
【解決手段】インバータをPWM制御によって制御するか矩形波制御によって制御するかに拘わらず、電圧位相指令θs*の今回値と前回値との差分としての電圧位相指令変化量Δθsが変化許容値θslim以下となるよう電圧位相指令θ*を設定し(S330〜S430)、設定した電圧位相指令θs*を用いて次の切替電気角θswやスイッチングパターンを設定する(S440,S450)。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御が実行される場合に、制御系が不安定になることを抑制できる交流回転電機の制御装置が求められる。
【解決手段】電圧制御部は、第一変調率域ではパルス幅変調制御を実行し、第二変調率域では矩形波制御を実行し、電流フィードバック制御部は、トルク指令に周期的なトルク振動が含まれる場合に、振動周波数の周期関数の特性を有する高調波モデルにより二相電圧指令を算出し、トルク電流演算部は、第一変調率域において変調率が増加するに従ってトルク振動の振幅を減少させ、第二変調率域でトルク振動の振幅をゼロとするように、トルク指令に含まれる前記トルク振動の制限を実行する制御装置。
(もっと読む)
モータ駆動回路、および、モータ装置
【課題】信号伝送の制約を回避しつつ、より適切に試験動作することが可能なモータ駆動回路を提供する。
【解決手段】モータ駆動回路は、前記モータを駆動する駆動電圧を前記モータに供給するドライバを、駆動制御信号により制御する駆動制御信号生成回路を備える。モータ駆動回路は、電源から前記ドライバに供給される電源電圧を検出し、前記電源電圧が予め設定された第1の閾値以上である場合には、前記駆動制御信号生成回路に通常動作を指示する通常動作モード信号を出力し、一方、前記電源電圧が前記第1の閾値未満である場合には、前記駆動制御信号生成回路に試験動作を指示する試験動作モード信号を出力するモード選択回路を備える。前記駆動制御信号生成回路は、前記通常動作モードに応じて、前記駆動制御信号により前記ドライバを制御して、前記モータを通常動作させ、一方、前記試験動作モード信号に応じて、前記駆動制御信号により前記ドライバを制御して、前記モータを試験動作させる。
(もっと読む)
埋込型永久磁石同期電動機の駆動装置
【課題】埋込型永久磁石同期電動機(IPMSM)の駆動装置が開示される。
【解決手段】埋込型永久磁石同期電動機(IPMSM)の回転子の位置及び速度を測定する検出部を含むシステムにおいて、弱磁束制御の第1領域の第1電流指令を受信して、IPMSMを駆動するための本発明の装置は、過変調された電圧情報を修正部に伝達する帰還部と、回転子速度と過変調された電圧情報を用いて、第1電流指令を弱磁束制御の第2領域の第2電流指令に修正する修正部と、第2電流指令を制御して、電圧を出力する制御部と、制御部の出力をインバータ部が合成可能な最大電圧に制限する第1制限部と、第1制限部の出力から、指令トルクに追従するための3相の電圧指令をIPMSMに印加するインバータ部と、を含む。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】モータの駆動時においても、相開放スイッチのオープン故障を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】異常検出部は、モータ21と駆動回路32との間で一方向への通電が可能、且つモータ21が高速回転していない状態で、判定対象となる特定相の相誘起電圧値が継続して異常判定閾値以下となった場合に、該特定相のリレーFETにオープン故障が発生したと判定するようにした。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】簡易な制御によって、高トルク領域からトルクを減少させる際のトルク追従性を高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域においてトルクを減少する場合には、電圧位相の上限ガード値を通常時からトルク減少方向に変化させる。これにより、電圧位相の変化量が強制的に確保される。
(もっと読む)
モータ駆動装置、それを用いたファン制御装置およびヒートポンプ装置
【課題】モータが運転停止後も慣性によって回転している状態から再起動する場合に、インバータへの過電圧や過電流などの異常を発生させずにモータを起動させることができるモータ駆動装置を提供する。
【解決手段】モータ駆動装置20では、マイクロコンピュータ30は、室内ファン15を駆動するファンモータ51を停止させる際、ファンモータ51の回転数を所定回転数まで低下させた後にインバータ25を停止する。ファンモータ51はブラシレスDCモータであって、起動後はロータ位置センサレス制御によって駆動される。ファンモータ51の回転数を所定回転数まで低下させた後にインバータ25を停止することによって、モータを再起動させるときの回転数は所定回転数以下となっている。
(もっと読む)
ブラシレスモータの制御装置及び制御方法
【課題】コンパレータの出力信号にチャタリングが発生し、ロータ位置を誤検出してしまうことを防止し、ロータの位置検出精度を向上させることができるブラシレスモータの制御装置を提供する。
【解決手段】ロータとステータを備えるブラシレスモータの回転駆動を制御する制御装置であって、ブラシレスモータの始動時にロータの停止位置に合わせた励磁パターンを初期通電時間だけブラシレスモータに通電した後、通電を停止してブラシレスモータのロータをフリーランさせる回転制御手段と、フリーラン中に発生する誘起電圧のエッジ検出を割り込みによって検出することによりロータの位置を検出する際に、ロータの回転方向毎に、次に検出されるべきエッジ検出の割り込みのみを許可した状態において、検出されたエッジの相と向きに基づきロータ位置を確定する回転方向判定手段とを備える。
(もっと読む)
駆動装置、及び駆動方法
【課題】モータの負荷が大きい場合において誘起電圧に基づいてモータを駆動させる。
【解決手段】駆動装置は、モータのコイルに通電するインバータ回路と、各コイルに生じる誘起電圧と等価中性点電位との比較結果を示すパルス信号を生成する誘起電圧インターフェース回路と、コイルに流す電流の向きを示す複数の通電パターンを用いて通電を行い、所定の電流値に達するまでの通電時間に基づいてロータが停止している位置を検出する停止磁極位置検出部と、停止磁極位置検出が検出したロータの位置に基づいて選択した通電パターンで通電を行いロータにトルクを加えた後に、誘起電圧インターフェース回路が出力するパルス信号のレベルに基づいてロータにトルクを加える通電パターンを選択し、選択した通電パターンで通電をインバータ回路に行わせる起動通電を行った後に誘起電圧に基づいた制御を行う通電制御部とを備える。
(もっと読む)
車両用操舵装置
【課題】三相ブラシレスモータの駆動回路内の1つのスイッチング素子が短絡故障した場合に、短絡故障が発生したスイッチング素子を特定することが可能となる車両用操舵装置を提供する。
【解決手段】短絡故障したFETがローサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最大値を検出し、検出された各相の相電圧最大値を比較することにより、短絡故障相を特定する。一方、短絡故障したFETがハイサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最小値を検出し、検出された各相の相電圧最小値を比較することにより、短絡故障相を特定する。
(もっと読む)
電動機制御装置、及びその電動機制御装置を用いた電動過給装置
【課題】電動機の損傷が発生することなく、適切に位置センサの位相を補正でき、位置センサの取り付け誤差低減にコストをかける必要のない電動機制御装置、及びその電動機制御装置を用いた電動過給装置を得る。
【解決手段】電動機5の磁極位置を検出する位置センサ信号の位相を補正する位相補正量を生成して出力する位相補正手段83を備え、位相補正手段83は、電動機5の回転速度が所定の範囲内にある場合に、通電停止信号を生成して出力し、位置センサの信号または第1の位相と電動機5の誘起電圧との比較に基づいて位相補正量を生成して記憶し、出力する。
(もっと読む)
駆動装置および車両
【課題】モータを良好に駆動するのに必要な電圧センサに検出誤差がある異常を判定する。
【解決手段】モータのトルク指令Tm*に基づいてPWM制御モードと矩形波制御モードとのうちいずれかの制御モードでインバータを制御するものにおいて、矩形波制御モードは、電圧センサにより検出された駆動電圧系の電圧VHとモータの回転数Nmとに基づいて電圧位相上限θlimを設定すると共に、設定した電圧位相上限θlimを用いてトルク指令Tm*に基づいて電圧位相指令θ*を設定して矩形波信号を出力する制御モードであり、インバータの制御モードCmの過変調制御モードから矩形波制御モードへの切り替え直前の過変調制御モードにおけるモータの電圧位相θovmが切り替え直後の矩形波制御モードで設定すべき電圧位相上限θlimより大きい場合には(S310)、電圧センサに検出誤差があるセンサ異常と判定する(S330)。
(もっと読む)
ブラシレスDCモータおよび換気送風機
【課題】発生トルクを高精度に制御可能なブラシレスDCモータおよび換気送風機を得ること。
【解決手段】モータ部3の回転速度を求め回転速度フィードバック値ωrfを出力する速度検出部5と、直流電圧を検出し直流母線電圧フィードバック値Vdcfを出力する直流母線電圧検出部6と、直流母線の平均電流を求め直流母線平均電流フィードバック値Idcfを出力する直流母線平均電流検出部7と、電機子電流指令値Ia*と各フィードバック値を入力し駆動回路2に電圧指示値Vsを出力する電機子電流制御部8と、を備え、電機子電流制御部8は、電機子電流フィードバック値Iafを推定する電機子電流推定部8fと、電機子電流指令値Ia*と電機子電流フィードバック値Iafとの偏差ΔIaを算出する偏差算出部8dと、偏差ΔIaをなくす電圧指示値Vsを出力する制御アンプ8aと、を備える。
(もっと読む)
電動パワーステアリング装置
【課題】3相電動モータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続できる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて3相電動モータ12を駆動する。その際、操舵トルク及び前記3相電動モータ12で発生する操舵補助トルクの和と外力との釣合い時に、前記異常時相電流指令値を低下させる電流指令値補正手段を備えている。
(もっと読む)
単相ブラシレスモータの駆動回路
【課題】 ホール素子などの位置検出素子を用いないで単相ブラシレスモータを駆動することで、モータの小型化や低コスト化を実現する。
【解決手段】 単相ブラシレスモータの駆動コイルに第1および第2駆動電流をいずれも供給しない非通電期間を挟んで、駆動コイルに第1駆動電流と第2駆動電流とを交互に供給するための駆動信号を生成する駆動信号生成回路と、駆動信号に応じて駆動コイルに第1または第2駆動電流を供給する出力回路と、非通電期間に、駆動コイルに発生する誘起電圧のゼロクロスを検出するゼロクロス検出回路と、を有し、駆動信号生成回路は、出力回路が駆動コイルに第1または第2駆動電流を供給する通電期間の開始から、ゼロクロス検出回路がゼロクロスを検出するまでの駆動周期に基づいて、次の通電期間の長さを決定し、ゼロクロス検出回路は、非通電期間の開始から所定時間経過後にゼロクロスの検出を開始する。
(もっと読む)
41 - 60 / 880
[ Back to top ]