
Fターム[5H560EC01]の内容
無整流子電動機の制御 (40,007) | 電子整流子機構の出力基本波形 (1,038) | 正弦波 (475)
Fターム[5H560EC01]に分類される特許
21 - 40 / 475
回転電機制御装置、および、これを用いた操舵制御システム
【課題】簡単な構成で、回転電機の駆動停止時に発生するラジオノイズを低減可能な回転電機制御装置を提供する。
【解決手段】マイコン41は、各相の巻線11、12、13に流す目標電流値を算出する。マイコン41は、算出した目標電流値に基づき、各相の巻線毎にパルス状のPWM信号を生成する。プリドライバ42およびインバータ30は、マイコン41により生成されたPWM信号に基づき、各相の巻線11、12、13に電圧を印加する。マイコン41は、モータ10の駆動を停止させる制御をするとき、全ての各相のPWM信号のパルス変化のタイミングと、他の各相のPWM信号のパルス変化のタイミングとがいずれも異なるようにPWM信号を生成する。
(もっと読む)
モータ駆動回路

【課題】 PWM信号のキャリア周波数を基本波とする高調波成分の影響を低減する。
【解決手段】 モータの回転子の回転位置を示す位置信号に基づいて前記モータの駆動コイルへの通電位相を制御する位相制御回路と、前記通電位相に応じたパルス幅変調信号を生成するパルス幅変調回路と、前記パルス幅変調信号に応じて前記駆動コイルに駆動電流を供給する出力回路と、前記通電位相に応じて前記パルス幅変調信号の周波数を切り替える周波数切替回路と、を有する。
(もっと読む)
モータ制御システム
【課題】1つのコンバータの出力電圧で複数のモータを駆動するモータ制御システムにおいて、各モータに対応して行われるフィードバック制御同士の干渉を防止してシステム電圧の可変制御を安定して滑らかに行えるようにする。
【解決手段】モータ制御システムは、コンバータと、2つのインバータと、2つの交流モータと、制御部とを備える。制御部は、少なくとも一方のモータついて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御されるようにシステム電圧を電流位相のフィードバック制御により可変するにあたり、電流ベクトルからそれぞれ求めたシステム電圧偏差が大きい方のモータをフィードバック制御の対象として選択する(S20〜S28)。
(もっと読む)
交流電動機の駆動装置およびそれを搭載する車両、ならびに交流電動機の制御方法
【課題】変調PWM制御および正弦波PWM制御を切換えて制御する交流電動機の駆動装置において、交流電動機の回転速度が急変した場合の緊急切換動作時におけるトルク急減を抑制する。
【解決手段】車両100は、ECU300によってPWM制御を用いてインバータ130が制御されてモータジェネレータ140を駆動することによって走行する。ECU300は、正弦波PWM制御および過変調PWM制御を含む複数の制御モードを切換えてインバータ140を制御する。ECU300は、過変調PWM制御を実行中に、駆動輪160がスリップ状態からグリップ状態に変化することに伴って電流が急増した場合に、過変調PWM制御から正弦波PWM制御に強制的に切換えるとともに、正弦波PWM制御における変調率の上限値を緩和して、正弦波PWM制御において通常時よりも大きなトルクが出力できるようにする。
(もっと読む)
ブラシレス電気機械、それを備える装置、移動体、発電機、及びロボット
【課題】ブラシレス電気機械における磁場の利用効率を高めて電気機械の効率を向上させる技術を提供する。
【解決手段】本発明によるブラシレス電気機械は、複数の永久磁石32Uを有する第1の駆動部材30Uと、複数の電磁コイルを有し第1の駆動部材30Uに対して相対的に移動可能な第2の駆動部材10と、第2の駆動部材10を挟んで第1の駆動部材30Uと反対側に配置され、第1の駆動部材30Uとの相対的な位置関係が固定された第3の駆動部材30Lとを有する。第2の駆動部材10には、第1と第2の駆動部材の相対位置を検出する磁気センサ40A,40Bと、磁気センサの出力信号を利用してブラシレス電気機械の制御を行う制御回路とを備える。第3の駆動部材30Lは、第1の駆動部材30Uの各永久磁石と対向する位置に、各永久磁石と共同して第2の駆動部材10の位置における磁場を強める磁場強化部材32Lを有する。
(もっと読む)
モータ制御装置
【課題】方形波駆動用のブラシレスモータに改造を加えることなく、モータ制御装置のロジック変更のみで推定角度の分解能を向上させ正弦波駆動させる。
【解決手段】モータ制御装置の制御部3において、パターン変換部12は、2π/3radずつ位相のずれた回転位置信号U,V,Wの値の組み合わせに対応するパターン番号を、パターン情報保持部11が記憶しているパターン情報に従って決定する。角速度算出部15は1つの回転位置信号の立ち上りから次の立ち上りまでの時間間隔から、サンプル時間あたりのロータの角速度を求める。断続角度算出部13がパターン番号にπ/3radを乗じて断続角度を求め、連続角度算出部18が断続角度にサンプル時間毎に角速度を加算して連続角度にする。
(もっと読む)
ブロアモータ駆動装置
【課題】ブロアモータ側に付いている制御装置の基準クロックである動作クロックの精度が低いブロアモータ制御装置でも、実回転速度の検出誤差を抑制し、バラツキの少ない回転動作を可能とする。
【解決手段】上位システムからPWM信号デューティ比を用いて、目標回転速度を与えられるブロアモータ駆動装置であり、PWM信号の周期誤差を算出し、位置検出センサから算出されたロータ回転速度を、周期誤差に基づき乗算補正し速度制御を実施する。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】PMW制御中の三相同期モータに発生するトルクの変動や異音を抑制することが可能な、モータ制御装置及びモータ制御方法を提供する。
【解決手段】三相電圧指令値(VUCMD、VVCMD、VWCMD)をパルス幅変調で制御して三相同期モータ2を制御するモータ制御装置1であって、三相同期モータ2に供給されるQ軸電圧VQ及びD軸電圧VDに基づいて、三相電圧(VU、VV、VW)を算出するDQ‐UVW変換部22と、DQ‐UVW変換部22が算出した三相電圧(VU、VV、VW)を三乗した値を、Q軸電圧VQとD軸電圧VDとの二乗和で除算して、三次高調波を演算し、さらに、演算した三次高調波を三相電圧(VU、VV、VW)に重畳して、三相電圧指令値(VUCMD、VVCMD、VWCMD)を演算する三次高調波重畳部24を備える。
(もっと読む)
モータ制御システム
【課題】交流モータにおいて最適電流進角ライン上か又はその近傍での電流位相による矩形波制御を積極的に用いることによってシステム全体の損失を効果的に低減する。
【解決手段】モータ制御システム10は、バッテリ11からの直流電圧を昇降圧可能なコンバータ20と、コンバータ20による昇圧直流電圧を交流電圧に変換するインバータ22と、インバータ22から交流電圧が印加されて駆動される交流モータM1と、入力されるトルク指令値に応じてコンバータ20およびインバータ22を作動制御することにより交流モータを矩形波制御等の複数の制御方式で駆動制御可能な制御部26とを備える。制御部26は、交流モータM1が矩形波制御中であるとき、交流モータM1に流れるモータ電流のd軸q軸平面上における電流ベクトルの電流位相(id,iq)が最適電流進角ライン上に近づくようにシステム電圧指令値VH*を補正する。
(もっと読む)
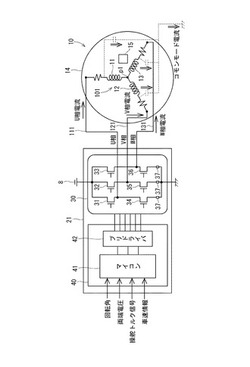
回転電機制御システム
【課題】回転電機制御システムにおいて、実変調度となまし変調度との間に乖離が生じても、PWM制御モードと過変調制御モードとの間の制御モード切替に際し、過大な電流が生じることを抑制することである。
【解決手段】回転電機制御システム10は、回転電機20と、回転電機20を駆動する電源回路ブロック12と、電流フィードバックの制御ブロック22と、制御装置40で構成される。制御装置40は、実変調度と、なまし変調度とを求める変調度取得部42と、実変調度となまし変調度の間について予め定めた所定条件に基づいて、PWM制御モードと過変調制御モードとの間で制御モードを切り替える制御モード切替部44を含んで構成される。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(63)を有する。そして、モータの回転角度と、ローパスフィルタのゲインの関係を示すマップ(61)から演算された値により、ローパスフィルタ(63)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(63)に基づいて出力されるモータ回転角速度に基づき、モータの逆起電力により発生する電流を相殺するように、モータに電流を流す非干渉制御を実行する。
(もっと読む)
駆動装置および電動車両
【課題】パルス幅変調制御によるインバータの制御から矩形波制御によるインバータの制御への切替時にインバータの制御性が低下するのを抑制する。
【解決手段】インバータをPWM制御によって制御するか矩形波制御によって制御するかに拘わらず、電圧位相指令θs*の今回値と前回値との差分としての電圧位相指令変化量Δθsが変化許容値θslim以下となるよう電圧位相指令θ*を設定し(S330〜S430)、設定した電圧位相指令θs*を用いて次の切替電気角θswやスイッチングパターンを設定する(S440,S450)。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御が実行される場合に、制御系が不安定になることを抑制できる交流回転電機の制御装置が求められる。
【解決手段】電圧制御部は、第一変調率域ではパルス幅変調制御を実行し、第二変調率域では矩形波制御を実行し、電流フィードバック制御部は、トルク指令に周期的なトルク振動が含まれる場合に、振動周波数の周期関数の特性を有する高調波モデルにより二相電圧指令を算出し、トルク電流演算部は、第一変調率域において変調率が増加するに従ってトルク振動の振幅を減少させ、第二変調率域でトルク振動の振幅をゼロとするように、トルク指令に含まれる前記トルク振動の制限を実行する制御装置。
(もっと読む)
永久磁石同期電動機の永久磁石の不可逆減磁が発生したか否かを検出する制御装置
【課題】永久磁石同期電動機の駆動軸の動作範囲が制限された場合でも永久磁石同期電動機の磁石の不可逆減磁が発生したか否かを適切に検出することができる制御装置を提供する。
【解決手段】正弦波状指令信号生成部17は、永久磁石同期電動機3へのトルク指令に対する正弦波状指令信号を生成する。推定トルク定数計算部23は、正弦波状指令信号の複数周期に亘る同一の動作状態での複数の電流値と複数の加速度値から取得した電流代表値及び加速度代表値と、永久磁石同期電動機3に関連する予め設定されたイナーシャとから、永久磁石同期電動機3に関連する推定トルク定数を計算する。減磁検出部24は、推定トルク定数と永久磁石同期電動機3に関連する予め設定されたトルク定数との差分に基づいて、永久磁石同期電動機3の永久磁石34a,34b,34c,34dに不可逆減磁が発生したか否かを検出する。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御の実行が開始される場合に、矩形波の出力電圧波形の位相が急変することを防止できる交流回転電機の制御装置が求められる。
【解決手段】電流フィードバック制御部は、トルク振動の周波数の周期関数の特性を有する高調波モデルを用いた演算の出力値に少なくとも基づいて二相電圧指令を算出し、矩形波制御の実行が開始された場合は、トルク振動の周期に応じて設定された期間内でゼロとなるように、高調波モデルを用いた演算の出力値を徐々に変化させる減衰処理を実行する制御装置。
(もっと読む)
駆動装置および車両
【課題】モータを良好に駆動するのに必要な電圧センサに検出誤差がある異常を判定する。
【解決手段】モータのトルク指令Tm*に基づいてPWM制御モードと矩形波制御モードとのうちいずれかの制御モードでインバータを制御するものにおいて、矩形波制御モードは、電圧センサにより検出された駆動電圧系の電圧VHとモータの回転数Nmとに基づいて電圧位相上限θlimを設定すると共に、設定した電圧位相上限θlimを用いてトルク指令Tm*に基づいて電圧位相指令θ*を設定して矩形波信号を出力する制御モードであり、インバータの制御モードCmの過変調制御モードから矩形波制御モードへの切り替え直前の過変調制御モードにおけるモータの電圧位相θovmが切り替え直後の矩形波制御モードで設定すべき電圧位相上限θlimより大きい場合には(S310)、電圧センサに検出誤差があるセンサ異常と判定する(S330)。
(もっと読む)
モータ起動制御装置およびモータ起動制御方法
【課題】 センサレス駆動方式による同期モータの駆動制御において、異常音の発生を抑制しつつ、駆動素子の破壊の危険性を低減してモータを起動することができるモータ起動制御装置およびモータ起動制御方法を提供する。
【解決手段】 起動制御部11は、強制起動期間で、ピーク値ホールド回路部17で検出されたモータ電流のピーク値のばらつきを算出し、算出したピーク値のばらつきが所定範囲よりも大きいか否か、小さいか否、および所定範囲内であるか否かを判定する。起動制御部11は、算出したピーク値のばらつきが所定範囲よりも大きいとき、駆動電圧の変調率を小さくし、算出したピーク値のばらつきが所定範囲よりも小さいとき、駆動電圧の変調率を大きくする。算出したピーク値のばらつきが所定範囲内であるとき、起動を完了して、強制起動期間を終了し、通常運転期間に移行し、制御部18による位相差制御を開始する。
(もっと読む)
車両用操舵装置
【課題】代替モータ回転角の検出に用いる回転角センサの分解能をモータ回転角に換算した値が90°〜180°の範囲内にある場合であっても、安定的に代替モータ回転角を用いたモータ制御を実行することのできる車両用操舵装置を提供すること。
【解決手段】マイコンは、モータ回転角センサにより検出されるモータ回転角に異常が検出された場合には、当該モータ回転角に代えて、ステアリングセンサの検出値に基づく代替モータ回転角を用いた代替制御を実行する。そして、マイコンは、代替制御に基づき換算分解能Δθ0に対応する位相遅れが生じたq軸電流指令値Iq*のq軸電流成分(第1成分Iq1)を打ち消すd軸電流指令値Id*を演算する。
(もっと読む)
電動車両
【課題】電動機の回転軸の回転角を検出するセンサに角度ズレが生じていても、電動機の予期しない回生制動を回避して、二次電池の過充電をより確実に抑止する。
【解決手段】d軸にマイナス方向の電流Idを流すと共にq軸に電流が流れないように電流指令Id*,Iq*を設定してモータを制御する際には、制御に用いる回転角センサからの回転角θをモータの正転時には逆転方向に補正し、モータの逆転時には正転方向に補正することにより、回転角θを回生から力行に向かう方向に補正する。これにより、回転角センサにオフセット誤差が含まれていても、補正した回転角θに基づいてモータMG2を制御することにより、q軸にモータMG2の回転方向とは逆方向の電流が流れない、即ち回生トルクが出力されないようにすることができる。この結果、モータが予期せずに回生するのを防止でき、二次電池の過充電を抑止することができる。
(もっと読む)
インバータ制御装置および車両
【課題】矩形波制御から過変調制御に切り替えた後のモータのトルク変動を抑制する。
【解決手段】過変調制御によってインバータを制御するときに、d軸,q軸の電流Id,Iqと電流指令Id*,Iq*との差分と比例項,積分項の制御ゲインと積分項の積分区間とを用いた電流フィードバック制御によってd軸,q軸の電圧指令Vd*,Vq*を設定してインバータを制御するものにおいて、矩形波過変調切替時に、矩形波過変調切替によるモータのトルク変動が大きくなりやすい変動想定状態のときには(S110,S120)、変動想定状態でないときに比して比例項,積分項のゲインを大きくすると共に積分項の積分区間を短くする(S140)。
(もっと読む)
21 - 40 / 475
[ Back to top ]