
Fターム[5H560HA00]の内容
無整流子電動機の制御 (40,007) | 起動 (564)
Fターム[5H560HA00]の下位に属するFターム
ソフトスタート (33)
高トルク起動 (39)
位置検出手段の切換による起動 (138)
直流機起動 (3)
断続起動 (18)
再起動 (51)
起動のための界磁位置の特定 (198)
その他 (18)
Fターム[5H560HA00]に分類される特許
1 - 20 / 66
モータ駆動装置、シート搬送装置及び画像形成装置
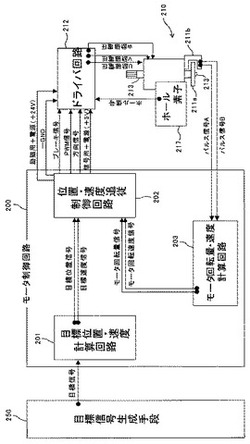
【課題】ドライバ回路に入力される回転センシング信号へのノイズの混入に起因するモータ回転の不安定化と、モータ起動時のギヤ歯の衝突に起因するギヤの寿命低下とを抑えつつ、搬送モータによって第1搬送ローラ16aを迅速に加速する。
【解決手段】DCブラシレスモータからなる搬送モータ210の回転量を検知するモータエンコーダ211と、ドライバ回路212とを搬送モータ210に搭載し、モータ起動時にて、搬送モータ210の回転速度を第1加速特性で加速させるように搬送モータ210を駆動しながら、モータエンコーダ211による検知結果と第1加速特性とに基づいて把握したタイミングが到来した後に、搬送モータ210の回転速度を第1加速特性よりも加速性に優れた第2加速特性で加速させるように搬送モータ210を駆動する加速度変更処理を実施するようにモータ制御回路200を構成した。
(もっと読む)
単相ブラシレスモータの駆動回路

【課題】 ホール素子などの位置検出素子を用いないで単相ブラシレスモータを駆動することで、モータの小型化や低コスト化を実現する。
【解決手段】 単相ブラシレスモータの駆動コイルに第1の駆動電流、および前記第1の駆動電流と反対方向の第2の駆動電流をいずれも供給しない非通電期間を挟んで、前記駆動コイルに前記第1の駆動電流と前記第2の駆動電流とを交互に供給するための駆動信号を生成する駆動信号生成回路と、前記駆動信号に応じて前記駆動コイルに前記第1または第2の駆動電流を供給する出力回路と、前記非通電期間に、前記駆動コイルに発生する誘起電圧のゼロクロスを検出するゼロクロス検出回路と、を有し、前記駆動信号生成回路は、前記出力回路が前記駆動コイルに前記第1または第2の駆動電流を供給する通電期間の開始から、前記ゼロクロス検出回路が前記ゼロクロスを検出するまでの駆動周期に基づいて、次の通電期間の長さを決定する。
(もっと読む)
モータ駆動制御装置及び画像形成装置
【課題】素早くかつ安定にモータを起動することができるモータ駆動制御装置を提供する。
【解決手段】モータ10を停止状態から起動するときは第1の駆動方式である矩形波駆動により回転駆動し、回転中は矩形波駆動または第2の駆動方式である正弦波駆動を切り替えて回転駆動する。これにより、回転位置が正確に得られない起動時は分解能の低い回転位置情報だけでも高トルクを発生可能な駆動方式でモータを駆動し、起動して高分解能の回転位置が得られるようになってから、正弦波駆動に駆動方式を切り替えることができる。そのため、素早くかつ安定にモータを起動することができる。
(もっと読む)
電動パワーステアリング装置および禁止方法
【課題】モータの回転角度を正確に検出することができない状態でモータにより操舵補助力が与えられることを抑制する技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、電動モータの回転角度に応じた信号を出力するレゾルバと、レゾルバからの出力値に基づいて電動モータの回転角度を算出するモータ角度算出部と、モータ角度算出部が算出した算出回転角度に基づいて電動モータへの目標電流を設定し、電動モータの駆動を制御する制御装置と、を備え、制御装置は、起動時に、電動モータの実際の回転角度と、レゾルバからの出力値が示す回転角度とが所定の位相差とならない異常が発生しているか否かを診断し、異常が発生している場合には電動モータの駆動を禁止する。
(もっと読む)
DCブラシレスモータおよびその制御方法
【課題】永久磁石が不要なSRモータのスペース効率(大きさ当りの出力)を高める。
【解決手段】励磁コイル31,32を有する固定子2と、該固定子2に同軸で設けられる回転子4とを備えて構成され、SR動作を行なうDCブラシレスモータ1において、固定子を軸線Z方向の断面において半径分を大略E字状に形成して2層構造とし、そのE字の3段の平行な部分21,22,23に磁極となる複数の突起212,222,232を周方向に繰返し形成するとともに、E字の3段の平行な部分21,22,23の磁極数を等しく、かつ中段の磁極(222)の中心線Yに対して、上下段の磁極(212,232)の位置をθだけ逆方向にずれて配置することで起動を可能にする。したがって、回転子4に磁石を使用していないために低コストであり、かつ磁石の熱減磁の問題も無い。また、2相分の磁気回路は常にトルクの発生に寄与しているので、スペース効率を高められる。
(もっと読む)
ブラシレスDCモータの制御装置およびそれを用いた送風装置
【課題】ブラシレスDCモータの磁束量ばらつきによるモータ出力ばらつきを抑制することができるブラシレスDCモータの制御装置を提供する。
【解決手段】インバータ回路9と、ブラシレスDCモータ1の印加電圧を検出する印加電圧検出手段10と、ブラシレスDCモータ1への供給電流を検出する電流検出手段11、ブラシレスDCモータ1が所望の出力となるように検出した供給電流と印加電圧に基づいてインバータ回路9を制御する出力制御手段12、ブラシレスDCモータ1の供給電流検出と同時に誘起電圧と電気角速度を検出し、誘起電圧と電気角速度の検出結果に応じて、出力制御手段12に予め記憶した基準となる印加電圧あるいは印加電圧に比例関係のあるデューティの制御パラメータを変更して、ブラシレスDCモータ1の磁束量のばらつきを補正する補正手段13を備える。
(もっと読む)
モータ駆動制御装置
【課題】モータを起動させる際、風等の影響を受けてモータが正方向または逆方向のどちらかに回転している状態にあっても、モータを確実に起動させることができるモータ駆動制御装置の提供。
【解決手段】回転方向検知部2は、モータ51起動直前の回転方向を検知する。駆動電圧調整部5は、回転方向検知部2により検知されたモータ51起動直前における回転方向に応じて、モータ51起動時の駆動電圧SU1,SV1,SW1が、モータ51が無回転の状態で起動する場合にモータ51に出力される所定駆動電圧と異なるように調整する。特に、駆動電圧調整部5は、モータの起動直前の回転方向に応じて、モータ51の回転数を制御するための制御パラメータを、モータ51が無回転の状態で起動する時に用いられる所定制御パラメータと異なるように調節し、調節された制御パラメータに基づいてモータ起動時の駆動電圧を更に調整することで、モータ起動時の駆動電圧が所定駆動電圧と異なるように調整する。
(もっと読む)
モータ駆動回路
【課題】モータを迅速に起動すること。
【解決手段】モータの正方向又は逆方向の回転を指示する回転方向指示信号に応じて、モータを正方向又は逆方向に回転させるための駆動信号を出力する駆動回路1と、モータの回転数が基準回転数よりも高いか否かを比較する回転数比較回路4と、回転方向指示信号が変化すると回転数比較回路4の比較結果に基づいて制動を制御するショートブレーキ制御回路2と、回転方向を変更する通電相順序切替制御回路3と、モータが停止しているときに回転方向指示信号が変化すると、回転数比較回路4の比較結果に関わらず、モータの制動動作が行われずにモータの回転方向が変更されるように駆動回路1を制御する為の判断回路110と、を備える。
(もっと読む)
変速機のオイル供給装置
【課題】検出油温と電動オイルポンプの近傍の油温とが乖離している場合であっても、確実に且つ速やかに電動オイルポンプからの吐出圧を得ることができるようにした、変速機のオイル供給装置を提供する。
【解決手段】電動モータ81と、電動モータによって駆動され、吐出したオイル51を変速機3に供給するオイルポンプ82と、オイル温度を検出する油温センサ72と、油温センサ72により検出されたオイル温度に応じた駆動トルクを出力するように電動モータを制御すると共に、電動モータの始動時に検出温度とオイルポンプの近傍のオイル温度とが乖離している可能性があると判断したら、検出温度に応じた駆動トルクを出力するように電動モータを制御する前に、検出温度に応じた駆動トルクで回転する場合の回転数よりも低い回転数で回転するように電動モータを回転数制御する制御装置90とをそなえる。
(もっと読む)
モータ駆動装置およびそれを用いた冷却装置、多相センサレスモータの状態の判定方法
【課題】センサレスモータの起動時において、その状態を正確に判定可能な検出回路を提供する。
【解決手段】複数のコンパレータCMPU〜CMPWは、それぞれが複数のコイルLU〜LWごとに設けられ、対応するコイルの一端に生ずる逆起電力VU〜VWを、中点電圧VCOMと比較し、比較結果を示す検出信号BEMFU〜BEMFWを生成する。遅延回路62U〜62Wは、複数のコンパレータCMPU〜CMPWそれぞれから出力される検出信号BEMFU〜BEMFWを所定時間τ、遅延させる。判定部70は、遅延前の検出信号BEMFU〜Wおよび遅延後の検出信号BEMFDU〜Wを、所定の期待値パターンEXP1、EXP2と比較する。
(もっと読む)
三相ブラシレスモータの制御装置
【課題】過渡的な負荷変動によるモータの停止をより確実に防止することができる三相ブラシレスモータの制御装置を提供することにある。
【解決手段】三相ブラシレスモータ(37)の各相に駆動電圧を供給する三相ブリッジインバータ回路(15)と、インバータ回路(15)のトランジスタに180度未満の導通角のPWM信号を印加して、三相ブラシレスモータを相補間欠通電駆動方式により駆動する相補間欠通電駆動手段(32)と、を備えることを特徴とする三相ブラシレスモータの制御装置。
(もっと読む)
モータ駆動制御回路
【課題】モータの誘起電流を効率的に検出する。
【解決手段】差動アンプ30は、同期モータ20の定常回転時におけるコイル電流Isを検出する。そのときの印加電圧S0をATT回路14からの出力などから検出する。検出されたコイル電流Isと、その時の印加電圧S0と、予め決定したスケーリングファクタAsを用い、誘起電流Ibを、Ib=As・S0−Isにより求める。求められた誘起電流Ibに基づいて、モータへの印加電圧を制御する。
(もっと読む)
ブラシレスモータの始動方法と駆動方法及びその駆動装置
【課題】負荷変動に応じて高い起動トルクと加速性能の安定した始動を実現するとともに、始動後にあって急加速・急減速で高い追従性を持ち、どんな場合にも脱調のない制御を実現する。
【解決手段】ロータの回転に従ってステータ巻線に誘起する逆起電圧を、転流タイミングを与える位置における逆起電圧を検出して転流タイミングを判定し制御する。転流タイミングは逆起電圧がプラスに変化する位相とマイナスに変化する位相で検出し、そのタイミングをそのまま転流タイミングとする。始動後の加速状態で且つ逆起電圧の振幅の大きな位置で測定できるので、始動時でも大きな逆起電圧の状態で測定することが可能になり、電圧測定して転流する制御で、様々な負荷条件に対応した柔軟な始動を実現できる。始動後の急加速急減速の脱調も防止する。
(もっと読む)
三相DCモータ制御回路
【課題】駆動電圧位相をモータ起動時においても適切に制御でき、さらには電源への逆流電流が発生しないモータ駆動方式を提供する。
【解決手段】三相DCモータに対し帰還制御を行う際、モータ自体が正弦波状の脈動成分を持つため、単に帰還させるだけでは交流成分が三相DCモータに加わる問題がある。従来は、補正用の脈動成分を加えた後に、モータからの帰還制御を行っていた。本発明においては、電流誤差検出部100で従来の補正を加えるだけでなく、電流誤差検出部100の出力(PWMD)をさらに帰還させ、そのデューティに応じてループゲインを切り替えることで、モータの低回転時においても有効な制御方法を提供することが可能となる。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】製造に必要な部品やコストの増大を抑えつつ電源投入時の突入電流を低減することができるモータ制御装置を提供する。
【解決手段】故障発生時等にバッテリ8から過大な電流が流れるのを防止するために設けられた開閉器60が第1および第2FET61,62から構成されている。第1および第2FET61,62は、それらの寄生ダイオードが互いに逆向きとなるように直列接続されている。第1および第2FET61,62のオン・オフを制御するために両FET61,62のゲート端子に開閉制御信号Sswが与えられ、この開閉制御信号Sswは、電源投入時にはそのデューティ比が0から1へと漸増するように変化する。このような電原投入時において、サージ吸収用ツェナーダイオード72が還流ダイオードとして機能する。
(もっと読む)
モータ制御装置
【課題】本発明は、モータを滑らかにPWM駆動可能なモータ制御装置を提供する。
【解決手段】モータ制御装置10は、モータ12のオンオフ切り替えを行う半導体スイッチ素子13と、電圧センサ17によって検知された電源ライン15の検知電圧Eが電圧閾値Ethを超えるかどうかを判断し、検知電圧Eが電圧閾値Ethを超えないと判断した場合にはモータ12をDC駆動させるDC駆動信号を半導体スイッチ素子13に出力すると共に、検知電圧Eが閾値電圧Ethを超えると判断した場合には、モータ12の負荷トルクTに基づいて設定された第1周波数F1でモータをPWM駆動させる第1PWM信号を生成し、第1PWM信号を半導体スイッチ素子13に出力するCPU14と、を備える。
(もっと読む)
モータ制御駆動装置及びモータ始動位置決め方法
【課題】回転角度検出手段からの出力に基づくロータ角度値が負の値を示すことなく、かつロータがデッドポイントに位置していたとしても正常に始動位置決めを完了することが出来るものを提供する。
【解決手段】モータ制御駆動装置のモータ制御手段が、始動時に、回転角度検出手段から初期ロータ角度値を取得すると、ロータが第1の角度になるように永久磁石同期モータを制御し、永久磁石同期モータのロータの回転が停止すると、回転角度検出手段から正の値であるロータの第1のロータ角度値を取得し、その後に、ロータが第2の角度になるように永久磁石同期モータを制御し、永久磁石同期モータのロータの回転が停止すると、ロータの回転に応じて取得したロータ回転角度値を第1のロータ角度値に加算することによって第2のロータ角度値を算出し、第2のロータ角度値をロータの始動基準角度値とする。
(もっと読む)
モータ制御装置
【課題】モータ起動の際のPWM信号のデューティ比が小さくとも、PWM信号の発生のための回路動作に変更を加えることなく、モータの確実な起動を確保する。
【解決手段】PWMコントロール部102は、回路動作開始後にPWM入力信号が所定数検出された時点からモータ駆動部104に対して、PWM入力信号に基づくPWM制御を禁止し、モータ105を100%のディーティで駆動開始せしめるPWM信号を出力する一方、モータ1−5の駆動開始後に、ホール信号が所定回数検出された時点以後は、PWM入力信号に相当する信号を出力し、モータ駆動部104にモータ105のPWM制御を実行せしめるよう構成されたものとなっている。
(もっと読む)
モータ制御装置及びドラム式洗濯機
【課題】モータの運転中に永久磁石が意図せずに減磁した場合でも、着磁状態の復帰を図ることができるモータ制御装置を提供する。
【解決手段】着磁制御部59は、減磁検出部58が、モータ1の運転中にアルニコ磁石が着磁された状態から減磁したことを検出すると、アルニコ磁石を再度増磁することで磁力を復帰させる。減磁検出部58は、誘起電圧指令決定部57がモータ1の運転状態に応じて決定すると誘起電圧指令Eq_refと、誘起電圧検出部56により検出された誘起電圧Eqとを比較し、前者に対して後者が所定の割合若しくは所定値だけ低下した場合に、アルニコ磁石9bの減磁を検出する。
(もっと読む)
電動機の制御装置および制御方法
【課題】立ち上がり時に実電流が電流指令値に収束するまでの時間を短縮することを可能とした電動機の制御装置を提供することである。
【解決手段】提案する電動機の制御装置は、電動機に対する電圧指令値を制御することで、その電動機の実電流を電流指令値に収束させる制御を行なう。この制御装置は、上記電流指令値と上記実電流との差分に対する閾値と、上記電圧指令値のうちの積分項に対する第1制限値と、その積分項に対する上記第1制限値より小さい第2制限値とを記憶するメモリと、上記メモリのデータを基に、上記積分項を制限するリミッタ35と、を有する。
(もっと読む)
1 - 20 / 66
[ Back to top ]