
Fターム[5H572CC01]の内容
Fターム[5H572CC01]の下位に属するFターム
電池を用いるもの (215)
Fターム[5H572CC01]に分類される特許
1 - 20 / 70
モータ駆動電流アンプとモータ駆動装置とその駆動方法とモータ駆動システム
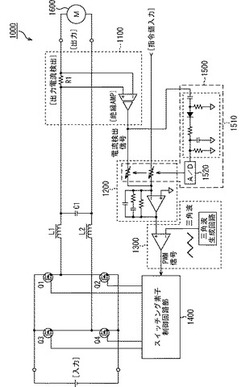
【課題】特性の異なる複数の種類のモータに対しても、信頼性高く良好に適用可能であり安定してモータを駆動できる、モータ駆動電流アンプとモータ駆動装置とその駆動方法とモータ駆動システムとを提供することを目的とする。
【解決手段】駆動対象となるモータへの出力電流リップルを検出する出力電流リップル検出部と、出力電流リップル検出部が検出した出力電流リップルに対応して、モータへの出力電流を制御する制御特性を変更するPID制御部と、PID制御部から出力信号が入力されて、PWM制御を遂行するPWM制御部と、PWM制御部から出力されるPWM信号に対応してスイッチング素子のオン・オフが制御されるフルブリッジ回路とを備えるモータ駆動装置とする。
(もっと読む)
同期制御装置と同期制御方法

【課題】
複数の駆動系を同期制御する汎用性のある手法を提供する。
【構成】
複数の駆動系を目標指令に従って動作させるため、第1の駆動系に対し第1の操作量を発生させ、第2の駆動系に対し第2の操作量を発生させる。第1の駆動系での目標指令からの誤差と、第2の駆動系での目標指令からの誤差との偏差に比例する同期制御用の操作量を発生させ、第1の操作量に同期制御用の操作量を加算し、第1の駆動系を制御する。また第2の操作量に同期制御用の操作量を加算し、第2の駆動系を制御する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】1つの駆動回路によって、三相モータと2つの直流モータとを駆動することが可能となるモータ制御装置を提供する。
【解決手段】テレスコピックモータ8は、U相配線15とV相配線16との間に、第2の給電回路21,22および第1のリレーR1を介して接続されている。チルトモータ9は、V相配線16とW相配線17との間に、第3の給電回路23,24を介して接続されている。第3の給電回路のうち、V相配線とチルトモータ9とを接続する接続線23に第2のリレーR2が設けられている。チルトモータ9と第2のリレーR2との接続点は、第3のリレーR3を有する切替回路25を介してU相配線に接続されている。
(もっと読む)
回転システム
【課題】
2つのモータの回転力を回転軸上で合成することで、1つのモータで回転軸を回転させた場合より少ない電力で回転軸を効率よく回転させることができる回転システムを提供することにある。
【解決手段】
回転軸の定常回転時の回転トルク分以上の回転力を有するモータを2つ備え、2つのモータで、回転軸の両端をそれぞれ回転させ、2つのモータの回転力を回転軸上で合成し、また、2つのモータがDCモータであり、2つのモータが電源配線において直列に接続され、1つの直流電源で2つのモータが駆動されることを特徴とする。
(もっと読む)
負荷制御装置
【課題】制御対象負荷の数が増えたとしてもオンオフ両タイミングをずらすことができ、電源変動勾配を抑制できるようにした負荷制御装置を提供する。
【解決手段】マイコンは、メモリのオンタイミング記憶領域に複数の負荷間で互いに重ならないようにオンタイミングのフラグを記憶させる。また、メモリのオフタイミング記憶領域に対し複数の負荷間で互いに重ならないようにオフタイミングのフラグを記憶させる(S10〜S14)。マイコンは、これらのオンタイミング、オフタイミングに応じて複数の負荷を駆動制御する(S15)。
(もっと読む)
電気車用駆動回路
【課題】チョッパ回路を1台として回路が大型化しないようにし、これが故障した場合でも、架線がない区間での自力走行を可能とする
【解決手段】複数台設けられるインバータの、例えば62の出力に接続される交流電動機72の巻線の中性点と蓄電装置9との間にスイッチ11を設け、少なくともチョッパ回路8およびその制御装置が故障したときは、スイッチ10a,10bをオフにしてチョッパ回路8を切り離すとともに、スイッチ11をオフにしインバータ出力をスイッチ12を介して蓄電装置9に接続し、インバータ62をチョッパ回路として動作させるようにする。
(もっと読む)
電気車用駆動回路
【課題】チョッパ回路を1台として回路が大型化しないようにし、これが故障した場合でも、架線がない区間での自力走行を可能とする
【解決手段】複数台設けられるインバータの、例えば62の出力に接続される交流電動機72の巻線の中性点と蓄電装置9との間にスイッチ11を設け、少なくともチョッパ回路8およびその制御装置が故障したときは、スイッチ10a,10bをオフにしてチョッパ回路8を切り離すとともにスイッチ11をオンにし、インバータ出力をスイッチ11を介して蓄電装置9に接続し、インバータ62をチョッパ回路として動作させるようにする。
(もっと読む)
モータ
【課題】制御回路を含む複数のモータを全体で低コスト化する。また、小型化、軽量化も実現する。
【解決手段】片方向電流すなわち直流電流で駆動可能な複数個のモータを、モータを選択する電力供給手段STと、直列に接続した各相巻線Wmへそれぞれに直流電流を供給する多相の相電流通電手段TRmとで駆動する。前記相電流通電手段TRmを複数のモータで共通化して使用することにより、全体での低コスト化、小型化、軽量化を実現する。また、モータを選択的に制御するだけでなく、時分割制御により複数のモータを並行して速度制御あるいは位置制御も可能とする。
(もっと読む)
冷媒用電動ポンプの駆動システム
【課題】コストの低減が可能で、複雑な駆動制御をほとんど必要としない電力変換器冷却用の冷媒用電動ポンプの駆動システムを提供する。
【解決手段】電源からの直流電力または交流電力を交流電力または直流電力に電力変換を行う電力変換器と、電力変換器を経由する循環経路内に冷媒を供給するための電動ポンプと、を有し、電動ポンプは、電力変換器の駆動回路から電力を供給される冷媒用電動ポンプの駆動システムである。
(もっと読む)
電動機駆動システム
【課題】複数台の交流電動機を1台の駆動装置(電力変換器)により駆動可能とし、かつ、巻線の巻き方が同じ固定子を使用可能としてシステム全体のコスト上昇を抑えると共に、横流の発生を抑制して銅損を低減させた電動機駆動システムを提供する。
【解決手段】n(nは2以上の整数)台の交流電動機を1台のインバータ400により駆動する電動機駆動システムにおいて、例えば、インバータ400の出力可能な電圧の1/2以下の端子電圧を印加可能な2台の交流電動機101,201をタンデム結合し、かつ、これらの交流電動機101,201の巻線を相ごとに直列に接続すると共に、誘起電圧の位相を一致させる。
(もっと読む)
N個のロボットを同時に制御するロボット制御装置
【課題】ロボットを容易に追加および削除できると共に低コストで小型にする。
【解決手段】N個(N≧2)のロボット(R1〜Rn)を同時に制御するロボット制御装置は、メイン制御ユニット(MCU)を具備し、メイン制御ユニットは、N個のロボットのそれぞれの動作指令を作成するメインプロセッサ(MP)と、メインプロセッサにより作成された動作指令に基づいてロボットのそれぞれを駆動するサーボモータの動作量を算出するサーボプロセッサ(SP)と、を含んでおり、さらに、メイン制御ユニットに接続された、N個のアンプユニット(AU1〜AUn)を具備し、サーボプロセッサにより算出されたサーボモータの動作量に基づいてN個のロボットのうちの1個のロボットのサーボモータを駆動するサーボアンプ(SA1〜SAn)、を含む。
(もっと読む)
画像形成装置、モータ制御装置及びそのモータ制御方法
【課題】
本発明は、画像形成装置、モータ制御装置及びそのモータ制御方法に関し、複数のBLDCモータを効率的に駆動制御できる画像形成装置、モータ制御装置及びそのモータ制御方法を提供することにある。
【解決手段】
画像形成装置が開示される。本画像形成装置は、画像形成のジョブを行うのに使用されるエンジン部と、エンジン部の動作を制御するエンジン制御部と、エンジン部を起動させる複数のBLDCモータと、エンジン制御部から複数のBLDCモータに対するデジタル制御命令を受信する通信インターフェース部と、複数のBLDCモータの駆動情報を検知するセンサ部と、複数のBLDCモータを制御するための駆動信号を生成する駆動信号部と、受信されたデジタル制御命令及びセンサ部の検知結果に応じて前記駆動信号部の動作を制御する速度制御部と、を含む。
(もっと読む)
モータ
【課題】共通の回転軸に設けた複数のステータに少ない数の駆動回路でモータ電流を供給した場合でも、十分な回転数およびトルクを得ることのできるモータを提供すること。
【解決手段】ステッピングモータ100では、モータ部20を複数、モータ軸線L方向に配列し、複数のモータ部20の間において極歯215、225、265、275の角度位置を同一にしてあるため、大きなトルクを得ることができる。モータ部20のステータコイル24同士およびステータコイル29同士を直列に接続し、その分、駆動回路からの出力電圧を高く設定してある。このため、ステータコア24、29に十分なモータ電流を供給することができるので、十分な回転数やトルクを得ることができる。
(もっと読む)
マトリックス回路
【課題】
スイッチ素子数及び配線数を抑制しつつ、被制御素子に流す電流の極性を変えることが出来るマトリックス回路を提供する。
【解決手段】
複数の行配線及び列配線に各々スイッチ素子を介在させたマトリックス回路において、行配線及び列配線が交差する点に被制御素子を中心に4つの整流素子をH型に配置したH型ブリッジ回路を配設した。
(もっと読む)
負荷駆動装置
【課題】2つのインバータ駆動の負荷を近接して設ける場合に、キャリア音を低減又は抑制する技術を提供する。
【解決手段】出力が略等しい第1及び第2インバータ10,20と、2つのインバータそれぞれが駆動し、互いに近接して設けられる第1及び第2三相負荷12,22とを備え、第1インバータのキャリア信号の周波数たる第1キャリア周波数C1と、第2インバータのキャリア信号の周波数たる第2キャリア周波数C2とは互いに略等しく、第1インバータのデューティ値と、第2インバータのデューティ値とは互いに略等しく、第1インバータと第2インバータとは同じスイッチングパターンで動作し、第1キャリア周波数と第2キャリア周波数との位相差が117.5度〜242.5度の範囲にある。
(もっと読む)
電源装置
【課題】消費電力や部品点数を抑制しつつ、小型のフライバックトランスを用いた場合でも出力電圧の出力系統毎の差を小さくし、クロスレギュレーションの向上を図る。
【解決手段】フライバックトランス11を備えた電源装置10に接続される複数の負荷13−1,13−2、…は、それぞれ負荷駆動制御信号が繰り返し入力されることにより駆動され、各負荷13−1,13−2、…は、駆動時の負荷量が同一であり、負荷駆動制御信号の有無に基づいて、駆動されている前記負荷の数の変動を検出し、負荷の数の変動に起因する出力電圧Voutの変動を補償するように、フライバックトランス11の出力電圧値を調整する調整回路に入力されるフィードバック電圧値を調整する。
(もっと読む)
モータ制御装置
【課題】1つの直流電源で、複数のモータを駆動させるモータ制御装置において、モータの短絡故障の検出を、安価な構成で実現する。
【解決手段】複数のモータ(105,106)を駆動させるために直流電源(403)に並列に接続された複数の電力変換器(401,402)のプラス端子側の接続点と直流電源のプラス端子の間、又はさらに複数の電力変換器のマイナス端子側の接続点と直流電源のマイナス(グランド)の間に電流検出抵抗(404,405)を配置し、電流検出抵抗の電圧から短絡故障を検出する。
(もっと読む)
モータ駆動装置
【課題】AD変換器はひとつだけで良く、更には、それぞれのモータの電流検出回路は、ドライバとグラウンドとの間に電流検出抵抗を1本備えるだけという簡単な構成のモータ駆動装置を提供する。
【解決手段】複数のモータ10A、10Bの夫々のコイルに電流を供給する複数のドライバ20A、20Bと、各ドライバをPWM周期中の所定の期間だけ通電状態にすることでコイルに供給する電流量を調節する複数のPWM回路30A、30Bと、各ドライバ20A、20Bとグラウンド電位GNDとの間に夫々設けられた電流検出抵抗40A、40Bと、各電流検出抵抗40A、40Bにより検出された夫々のコイル電流信号A、Bから何れか一つを選択するセレクタ50と、セレクタ50で選択されたコイル電流信号をデジタル値に変換するAD変換器60と、各PWM回路30、セレクタ50、及びAD変換器60の動作を制御するプロセッサ70と、を備えて構成されている。
(もっと読む)
クレーンシステム
【課題】複数のクレーンを効率的に運転するクレーンシステムを提供する。
【解決手段】システムコントローラ5は、受電部4と複数のクレーンの電力を受信する送受信部と、受電部電力が最大電力を超えないように荷役コマンドに対応したクレーン最大電力を生成するクレーン最大電力生成部を備え、クレーンは操作信号と荷役コマンドと最大電力に基づいて巻上部・走行部・横行部・起伏部の速度プロファイルを生成しこれより位置指令を生成して各部のインバータに位置指令を送信しインバータから状態情報を受信するクレーンコントローラと、商用電源から第1直流電源を生成するコンバータと、第1直流電源から前記位置指令に基づいて交流電源を生成し巻上部・走行部・横行部・起伏部のモータを駆動する複数のインバータと、第1直流電源と第2直流電源の間にあり双方向に電力を変換するチョッパと、第2直流電源に接続した蓄電部と、を備えた。
(もっと読む)
電動機制御方法及び電動機制御装置
【課題】空転滑走時の連れ回りに対する全く新しい制御方式による解決手法を提案すること。
【解決手段】 力行時には、制御対象2軸のうち、進行方向最後方の第2軸の電動機IM_2のトルク成分電流から、進行方向最前方の第1軸の電動機IM_1のトルク成分電流を減算した電流差ΔIq_rを用いた制御を行う。具体的には、空転滑走の発生を検知した場合に、その検知時の電流差ΔIq_rを保持し、これに所定の係数K1を乗じた値を連れ回り防止引き下げ指令Iq_Rとして、トルク成分電流指令値Iq*からの引き下げ指令とする。
(もっと読む)
1 - 20 / 70
[ Back to top ]