
Fターム[5H572DD02]の内容
Fターム[5H572DD02]の下位に属するFターム
誘導電動機 (59)
同期電動機(ヒステリシスモータを含む) (111)
交流整流子電動機 (2)
Fターム[5H572DD02]に分類される特許
41 - 60 / 212
遠心分離装置及びその運転方法
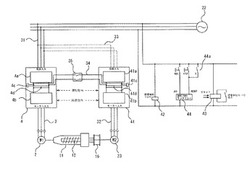
【課題】遠心分離装置において通常運転時に停電が発生することに起因して生じる課題を解決する
【解決手段】遠心力の作用により被処理液を固形物と分離液とに分離する回転ボウルと、回転ボウル内に配置され、回転ボウルと相対的な差速をもって回転されるコンベアと、回転ボウルに連結された主駆動モータと、コンベアに連結されたバック駆動モータと、電源と主駆動モータとの間に電気的に接続される主駆動側インバータ装置と、電源とバック駆動モータとの間に電気的に接続されるバック駆動側インバータ装置と、を備えた遠心分離装置の運転方法であって、停電が発生すると、慣性力で回転する回転ボウル及びコンベアによって主駆動モータ及びバック駆動モータで生成される回生電力を、バック駆動側及び/又は主駆動側インバータ装置の制御電源及び動力電源に給電して回転ボウルとコンベアとが相対的な差速をもって回転する状態を維持しながら減速させるようにする。
(もっと読む)
電流センサ異常検出装置および車両駆動システム

【課題】簡単な構成および処理によってモータジェネレータ用の電流センサの異常を検出する装置、およびそのような装置を用いた車両駆動システムを提供することを目的とする。
【解決手段】電流センサユニット42Aおよび42Bによる検出値に相違がある場合には、電池10から供給される直流負荷電力と交流負荷電力との比較に基づいて、正常な電流センサユニットを特定する。すなわち、コンバータ電流検出値に基づいて電池10からDCDCコンバータ回路12に供給される直流負荷電力PDが求められ、電流センサユニット42Aによる検出値対DAおよび電流センサユニット42Cによる検出値対DCに基づいて2つのモータジェネレータに供給される交流負荷電力PAが求められる。そして、直流負荷電力PDと交流負荷電力PAとの比較に基づいて電流センサユニット42Aが正常であるか否かが判定される。
(もっと読む)
モータ
【課題】制御回路を含む複数のモータを全体で低コスト化する。また、小型化、軽量化も実現する。
【解決手段】片方向電流すなわち直流電流で駆動可能な複数個のモータを、モータを選択する電力供給手段STと、直列に接続した各相巻線Wmへそれぞれに直流電流を供給する多相の相電流通電手段TRmとで駆動する。前記相電流通電手段TRmを複数のモータで共通化して使用することにより、全体での低コスト化、小型化、軽量化を実現する。また、モータを選択的に制御するだけでなく、時分割制御により複数のモータを並行して速度制御あるいは位置制御も可能とする。
(もっと読む)
制御装置
【課題】モータの動作に精度が要求されるときに、インバータのPWM方式の切り替えに伴い発生するモータのトルク変動の影響を回避でき、モータの動作に精度が要求されないときに、PWM方式の切り替えによる効果を得ることができる制御装置を得ること。
【解決手段】制御装置は、複数のPWM方式のうちインバータのPWM動作に用いるためのPWM方式の切り替えを行う切り替え部と、動作指令信号により第1の動作が指令されたと判断した場合、前記切り替え部によるPWM方式の切り替えを不許可とし、前記動作指令信号により第2の動作が指令されたと判断した場合、前記切り替え部によるPWM方式の切り替えを許可する指令判断部とを備え、前記切り替え部は、前記指令判断部により切り替えが不許可とされた場合、PWM方式の切り替えを行わず、前記指令判断部により切り替えが許可された場合、PWM方式の切り替えを行う。
(もっと読む)
駆動制御装置及びこれを搭載した電動車両
【課題】走行中にモータに供給する電力に制限を要する状態までバッテリの充電状態が低下しても、車両の挙動を好適に維持して安定した走行が可能な駆動制御装置を提供する。
【解決手段】電動車両1の駆動制御装置10は、複数のモータ5各々に対応して設けられ、モータ5各々の駆動を制御するための複数のモータ制御モジュール12と、モータ制御モジュール12を制御するための車両制御モジュール11と、モータ5に電力を供給するバッテリ13と、を備え、車両制御モジュール11またはモータ制御モジュール12が、少なくとも一の前記モータ5に供給する電力に対して制限を要する状態までバッテリ13の充電状態が低下したことを条件としてその制限を反映させた制御指令を複数のモータ5すべてに対して同じタイミングで送信する。
(もっと読む)
電動機駆動装置、これを用いた電動パワーステアリング装置、及び、プログラム
【課題】正常な電動機駆動部だけでの電動機駆動を実行できる小型かつ安価で信頼性の高い電動機駆動装置を提供する。
【解決手段】3系統の電動機駆動部を備える電動機駆動装置において、判定制御部は、電動機の駆動開始前に電動機駆動部の故障検出処理として処理A、処理Bを実行する。処理Aで異常と判定された第1系統の電動機駆動部は、電源リレーがオフされて電力供給が遮断されるとともに処理Bが中止されるため、マイコンの処理負荷を軽減することができる。正常系統である第2系統および第3系統では、両方の処理Bの終了を待って、電動機の駆動が開始される。ある系統での電動機の駆動と、別の系統での故障検出処理とが同時に実行されることがないため、プログラムが簡素となり、信頼性が向上する。さらに、複雑な演算量が減少するため、判定制御部を小型で安価なマイコンで構成することができる。
(もっと読む)
電気車制御装置
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更を不要とし、電力変換回路の数を抑制して車体の振動乗り心地を改善する。
【解決手段】車体が搭載される2台の台車のうち,前方の台車の前方の車輪を駆動する電動機と後方の台車の前方の台車を駆動する電動機とが並列接続され,前方の台車の後方の車輪を駆動する電動機と後方の台車の後方の車輪を駆動する電動機とが並列接続され,2組の並列接続した電動機の組み合わせに対し逆方向の振動トルクが重畳するように制御することにより電動機のトルク変動を用いて2台の台車に同一の上下力を発生させてそれぞれの台車の上下振動を抑制することにより車体が前後線対称形状に弾性変形する振動を間接的に抑制することを特徴とする電気車制御装置。
(もっと読む)
建設機械の駆動制御装置及び駆動制御方法
【課題】建設機械の作業状態に応じて一方側の車輪に伝達する他方の車輪の駆動力を調整すること。
【解決手段】建設機械1は、前輪2a,2b及び後輪2c,2dの駆動軸にそれぞれ連結され、前輪2a,2b及び後輪2c,2dを回転駆動する電動モータ3a,3b及び電動モータ3c,3dと、後輪2c,2dの駆動軸に連結され、後輪2c,2dの回転に合わせて駆動される油圧ポンプ7a,7bと、前輪2a,2bの駆動軸に連結され、油圧ポンプ7a,7bから供給される圧油によって前輪2a,2bを回転駆動する油圧モータ5a,5bを備える。コントローラ14は、建設機械1の作業状態に応じて、電動モータ3a〜3dの駆動力を制御すると共に、油圧ポンプ7a,7bから油圧モータ5a,5bに伝達されるトルクを制御することにより、前輪2a,2bに発生する駆動力を調整する。
(もっと読む)
冷媒用電動ポンプの駆動システム
【課題】コストの低減が可能で、複雑な駆動制御をほとんど必要としない電力変換器冷却用の冷媒用電動ポンプの駆動システムを提供する。
【解決手段】電源からの直流電力または交流電力を交流電力または直流電力に電力変換を行う電力変換器と、電力変換器を経由する循環経路内に冷媒を供給するための電動ポンプと、を有し、電動ポンプは、電力変換器の駆動回路から電力を供給される冷媒用電動ポンプの駆動システムである。
(もっと読む)
モータ制御装置、及び、モータ制御方法
【課題】1つのフルブリッジ型MERSで、複数のモータをソフトスタートさせて定格運転に移行させるモータ制御装置、及び、モータ制御方法を提供する。
【解決手段】モータ制御装置10は、フルブリッジ型MERS100と、線路150と、制御回路200と、複数の接続スイッチSWMiから構成され、交流電源VSと複数のモータMiの間に接続される。接続スイッチSWMiはそれぞれモータMiとフルブリッジ型MERS100と線路150に接続される。制御回路200は、フルブリッジ型MERS100を構成する4つの逆導通型半導体スイッチSW1乃至SW4と、接続スイッチSWMiを切り替えることによって、モータMiを1つずつソフトスタートさせて定格運転に移行させる。
(もっと読む)
交流電動機の監視装置
【課題】電流振幅の影響を受け難く、検出精度の高い交流電動機の監視装置を得る。
【解決手段】共通の交流電源1に並列接続された複数の交流電動機3の異常を監視する監視装置であって、電圧検出手段6と、個別電流検出手段5と、全電流検出手段4と、電圧検出手段6、個別電流検出手段5及び全電流検出手段4の出力から各々の個別の電力及び全体の電力を演算する電力演算手段74と、電圧検出手段4、個別電流検出手段5及び全電流検出手段4の出力からそれぞれの実効値を演算する実効値演算手段75と、電力演算手段74と実効値演算手段75の出力から、全電流と前記個別電流の各々の位相差を演算する位相差演算手段77とで構成する。各々の位相差が交流電動機3によって定められた異常判定レベルを超えたとき、交流電動機3が異常であると判定する。
(もっと読む)
電気車駆動システム
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更が不要で、車体の振動乗り心地を改善する手法が必要である。また、電動台車で容易に実現できる手法が望ましい。
【解決手段】車輪を有する台車の上に車体が搭載された電気車であり、台車に装荷された電動機が歯車を内蔵した駆動装置を介して車輪を駆動することにより走行する電気車両において、電動機のトルクにより車体の振動抑制制御を行う。また、台車振動を電動機の回転速度から演算した情報をもとに電動機のトルクにより台車振動を抑制し、間接的に車体の振動の抑制を行う。
(もっと読む)
冷凍装置
【課題】モータを有した圧縮機を複数備えた冷凍装置において、コモンモードノイズを低減できるようにする。
【解決手段】所定の電力を供給する電力変換装置(42a,42b)をモータ(27)毎に設ける。制御部(48)を設けて、キャリア信号(C)等に基づいて、電力変換装置(42a,42b)でのスイッチングを制御する。また、それぞれのモータ(27)に形成された静電容量(Co)を接地させるコイル(50)を設ける。これらのコイル(50)はフェライトコア(51)に同相に巻いておく。そして、制御部(48)によって、それぞれの電力変換装置(42a,42b)間で、スイッチングによるコモンモード電圧の立上がりタイミング同士又は立下りタイミング同士が、キャリア信号(C)の1周期中に少なくとも1度は同期するように、スイッチングのタイミングを制御する。
(もっと読む)
電動機駆動装置の制御装置
【課題】電圧制御部による内部処理に関する演算周期が最適化され、交流電動機を制御する際の処理負荷の低減が図られた制御装置を提供する。
【解決手段】直流電圧を交流電圧に変換して交流電動機に供給する直流交流変換部を備えた電動機駆動装置を、ベクトル制御法により制御する制御装置。交流電動機を駆動するための電圧指令値から直流交流変換部を制御するための制御信号を生成する電圧制御部として、電圧指令値と直流交流変換部に供給される実際の直流電圧とに基づいて、変調率と電圧指令位相とを導出する第一電圧制御部と、変調率と電圧指令位相と磁極位置とに基づいて、制御信号を生成する第二電圧制御部と、を備え、第一電圧制御部の演算周期(第二演算周期T2)が、第二電圧制御部の演算周期(第一演算周期T1)よりも長く設定されている。
(もっと読む)
真空ポンプシステム、及びその運転方法
【課題】ドライ真空ポンプとターボ分子ポンプが同一電源ライン上に接続された真空ポンプシステムの電源遮断の場合に、ターボ分子ポンプが停止するまで、ドライ真空ポンプが継続して運転できる真空ポンプシステムを提供すること。
【解決手段】ターボ分子ポンプとドライ真空ポンプとを備え、交流電源50からの交流電力を直流電力に変換し、ターボ分子ポンプ用インバータ回路42と、ドライ真空ポンプ用インバータ回路40により所定周波数の交流電力に変換し、ターボ分子ポンプ駆動用電動機46、ドライ真空ポンプ駆動用電動機44に供給する真空ポンプシステムであって、運転中に交流電源50が遮断した場合、ターボ分子ポンプ駆動用電動機46で発電される回生電力をターボ分子ポンプ用インバータ回路42を介して直流電力に変換し、ドライ真空ポンプ用インバータ回路40を介してドライ真空ポンプ駆動用電動機44に供給する。
(もっと読む)
画像形成装置、モータ制御装置及びそのモータ制御方法
【課題】
本発明は、画像形成装置、モータ制御装置及びそのモータ制御方法に関し、複数のBLDCモータを効率的に駆動制御できる画像形成装置、モータ制御装置及びそのモータ制御方法を提供することにある。
【解決手段】
画像形成装置が開示される。本画像形成装置は、画像形成のジョブを行うのに使用されるエンジン部と、エンジン部の動作を制御するエンジン制御部と、エンジン部を起動させる複数のBLDCモータと、エンジン制御部から複数のBLDCモータに対するデジタル制御命令を受信する通信インターフェース部と、複数のBLDCモータの駆動情報を検知するセンサ部と、複数のBLDCモータを制御するための駆動信号を生成する駆動信号部と、受信されたデジタル制御命令及びセンサ部の検知結果に応じて前記駆動信号部の動作を制御する速度制御部と、を含む。
(もっと読む)
電動車駆動制御装置及び方法
【課題】 部品数を少なく単純な制御で操舵性を向上させること。
【解決手段】 電動車の左右輪を独立に駆動する一対のモーターMTR, MTLに対して、所定の速度制御値ωBR, ωBLに応じてパルス制御した操作電圧VCRをそれぞれ印加する一対のパルス制御部14R, 14Lと、モーターMTR, MTLのそれぞれの回転数ωR, ωLに逆起電力定数Keを掛けた逆起電力電圧VFR, VFLと操作電圧VCR, VCLとから電機子抵抗電圧VR, VLを算出すると共に、右輪のモーターMTRの電機子抵抗電圧VRと左輪のモーターMTLの電機子抵抗電圧VLとの電機子抵抗電圧差Vdiffを算出する簡易トルク制御部30と、前記電機子抵抗電圧差Vdiffを当該左右輪のトルク差Tdiffに比例した値として当該電圧差Vdiffをトルク差制御値ωCに換算するトルク差ゲイン制御部38と、前記トルク差制御値ωCを前記速度制御値ωBR, ωBLに加減算する一対のトルク差制御値比較部12R, 12Lとを備えた。
(もっと読む)
モータ制御装置
【課題】複数のモータを駆動する場合でもモータに発生する振動を低減できるモータ制御装置を提供する。
【解決手段】モータ制御装置のコントローラは、双方のモータの回転角のずれ量が0度であって回転数が50rpmの場合には(ステップSA4でYES)、少なくとも一方のモータの駆動電流を制御してモータの回転速度を調整することにより、回転角のずれ量を180度に補正する。また、コントローラは、双方のモータの回転角のずれ量が180度であって回転数が25rpmの場合には(ステップSA7でYES)、少なくとも一方のモータの駆動電流を制御してモータの回転速度を調整することにより、回転角のずれ量を0度に補正する。
(もっと読む)
負荷駆動システムの制御装置
【課題】極小負荷状態でコンバータの動作を休止しても当該コンバータの出力電圧を保持可能な負荷駆動システムの制御装置を提供すること。
【解決手段】直流電源と複数の負荷との間で電力を授受する際に電圧を指令値に昇圧又は降圧するコンバータを含む負荷駆動システムの制御装置は、外部からの指令に基づいて複数の負荷の各々の動作を制御する複数の負荷駆動制御部と、コンバータをスイッチング制御するスイッチング制御部と、複数の負荷の各負荷電力の総和である総負荷電力を導出する負荷電力導出部と、総負荷電力が零をまたぐ所定範囲内の値であるとき、コンバータのスイッチング動作を休止するようスイッチング制御部に指示するスイッチング動作制御部と、総負荷電力が前記所定範囲内の値であるとき、指令値とコンバータの出力電圧の偏差の絶対値が減少するよう、複数の負荷駆動制御部のいずれかに対して行われた指令を補正する指令補正部とを備える。
(もっと読む)
モータ制御装置
【課題】1つのモータ制御装置による複数のモータの制御において、各モータの制御間に生じる干渉の影響を軽減させ、各モータのモータ制御性能の低下を抑制するようにするモータ制御装置を提供する。
【解決手段】モータ制御装置10は、各インバータ11,12によりそれぞれ駆動される各モータM11,M12をそれぞれ各別のフィードバック制御に基づき駆動制御する。同制御装置10には、モータ電流を測定するAD変換部24,34と、設定位相のキャリアを生成するキャリア発生部22,32と、インバータを駆動させるスイッチング信号と、スイッチング信号の変化しない時点の信号とを出力するPWM発生部23,33とを有する2つのモータ制御部18,19が備えられる。また各モータ制御部18,19のキャリア波形に位相ずれがある場合、前記各キャリア発生部の少なくとも一方に位相ずれを解消させる位相を設定するキャリア同期部40を備える。
(もっと読む)
41 - 60 / 212
[ Back to top ]