
Fターム[5H572FF01]の内容
Fターム[5H572FF01]の下位に属するFターム
併入 (11)
Fターム[5H572FF01]に分類される特許
1 - 20 / 89
電動シート用制御装置
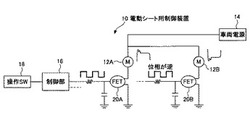
【課題】本発明は、電動シート用制御装置に係り、駆動すべきすべてのモータの全作動時間を短縮させつつ、モータの起動時又は停止時に発生するPWMノイズが車両ノイズとして外部に放出されるのを抑制することにある。
【解決手段】シートの形状又は位置を可変するために設けられた複数のモータと、モータごとに設けられ、該モータをPWM駆動するPWM駆動手段と、上記のPWM駆動手段によるモータの起動時及び停止時に該モータの速度を徐々に変化させる速度制御を実行する速度制御手段と、を備え、少なくとも一の前記モータの停止時における前記速度制御と他の前記モータの起動時における前記速度制御とが実行される場合、前記速度制御手段は、該2つ以上の前記モータに対する互いの前記速度制御のタイミングを一致させ、かつ、前記PWM駆動手段は、該2つ以上の前記モータをPWM駆動するうえでの位相を互いに逆相とする。
(もっと読む)
インクジェット記録装置およびモータ制御方法

【課題】複数のモータを動作させる際の駆動電流の急峻な変化を抑えるインクジェット記録装置を提供する。
【解決手段】記録ヘッドを搭載したキャリッジを往復移動させるキャリッジモータと、記録ヘッドからのインク吐出に伴って生じるミストを排気するファンを駆動するファンモータとを備えるインクジェット記録装置において、キャリッジを停止状態からインク吐出による記録時の目標速度まで加速する加速期間に、ファンの回転数を低下させるようにファンモータを制御する。
(もっと読む)
モータ制御装置
【課題】同時に加速または減速する場合が高い頻度で発生する複数のモータを、共通電源の電源容量を増加させずに、サイクルタイムを減少させるような適切な加減速条件で動作させることができるモータ制御装置を得ること。
【解決手段】加減速パラメータ設定部3aは、電源供給部2から全モータに供給できる電力である供給可能電力の制限値または電源供給部2が全モータからの回生電力を処理できる電力である回生可能電力の制限値の範囲内で、動作指令8に含まれる指令移動量及び指令速度に基づき、2以上のモータのそれぞれに対する加減速パラメータ9を算出し、加減速処理部4aに設定する。
(もっと読む)
電動機運転装置およびその運転方法
【課題】 電動機運転装置によって複数の電動機を順次起動し、安定的に定格運転する。
【解決手段】 電動機運転装置1は、所内母線10の所内電力31を起動電力に変換し、
この起動電力を複数の電動機11に順次供給し定格運転まで加速する起動電力供給装置2
と、所所内電力31を定格電力に変換し、複数の電動機11のうち定格運転まで加速され
たものに対して、起動電力供給装置2から切替えて定格電力を供給する定格電力供給装置
3とを備え、起動電力供給装置2は、定格電力供給装置3の異常時において、定格電力を
定格電力供給装置2から切替えて複数の電動機11のうち定格運転中のものに供給する。
(もっと読む)
モーター制御装置、搬送装置、画像形成装置
【課題】複数のモーター部を制御するために必要なポート数を減らし、CPU等の制御素子を選択するうえでの制約を軽くし、制御素子に要するコストを抑える。
【解決手段】モーター制御装置は、第1信号が入力される第1信号入力部と、第2信号を出力する第2信号出力部と、モーターと、を含む複数のモーター部と、第1信号を出力する出力ポートと、第2信号が入力される入力ポートを含むモーター制御部と、を含み、出力ポートは、複数のモーター部のうち先頭のモーター部の第1信号入力部に接続され、第2信号出力部は、次段のモーター部の第1信号入力部に接続され、第2信号を次段のモーター部の第1信号として入力し、先頭の次段以降のモーター部は、第2信号がモーターの回転が安定したことを示す状態であるとき、モーターを回転させる。
(もっと読む)
ハイブリッド車
【課題】内燃機関を始動する際の車両の振動を抑制すると共に内燃機関の始動完了までに要する時間の短縮を図る。
【解決手段】エンジンの始動が指示されたときには、エンジンの始動時に想定される第2のモータの駆動点を用いて、エンジンの始動時に正弦波制御モードで第2のインバータを制御する(制振制御を実行する)ことになる駆動電圧系の電圧としての始動時正弦波制御電圧VHsinを設定し(S410)、駆動電圧系の電圧VHが始動時正弦波制御電圧VHsinより低いときには(S430)、駆動電圧系の電圧VHを始動時正弦波制御電圧VHsin以上に上昇させた後に(エンジンの始動が指示されてから待機時間twtが経過したときに)(S480)、正弦波制御モードで第2のインバータを制御しながら第1のモータによってエンジンをモータリングして始動する。
(もっと読む)
遠心分離機
【課題】
遠心分離機において、交流電源の容量に対して複数のモータへの電力配分を設定する。
【解決手段】
双方向の昇圧コンバータ4からインバータ8を介して接続される遠心用モータ(ロータ駆動用モータ)9と、単方向の昇圧コンバータ5からインバータ12を介して接続されるロータ冷却用コンプレッサ用モータ13を交流電源22に並列に接続し、これらのコンバータ4、5の昇圧電圧を交流電圧22のピーク値以上とし、制御装置20はインバータ8、12を例えばPWM制御によりこれらのモータ9、13に適切な電圧が供給されるように制御する。この際、交流電源22の給電容量に合わせて遠心用モータ9とコンプレッサ用モータ13のロータ加速時の電力配分を設定する。この配分はあらかじめ設定して記憶しておき、これに従ってモータ9、13の回転を制御する。
(もっと読む)
直流交流変換装置を接続可能なモータ駆動制御装置
【課題】DC/AC変換装置を接続可能なモータ駆動制御装置において、モータ駆動制御装置に接続したDC/AC変換装置に接続されたモータの出力が大きい場合でも、AC/DC変換回路が過負荷状態になる事態を回避することができるモータ駆動制御装置を提供する。
【解決手段】接続部11にDC/AC変換回路20を接続したときのモータ4,5,6,19の出力の合計がAC/DC変換回路12によって供給可能な電力を超えると予測される場合、制御装置16は、モータ4,5,6,19の出力の合計をAC/DC変換回路12によって供給可能な電力以下に維持しながらAC/DC変換回路12からDC/AC変換回路13,14,15,20への直流電圧又は直流電流の供給又は供給停止を制御する。
(もっと読む)
モータ制御装置
【課題】電力計等の専用の測定機器を用いることなしに、正確に消費電力の計測を可能にする抵抗回生方式のモータ制御装置を得ること。
【解決手段】抵抗回生方式のモータ制御装置において、モータに流れる電流に基づき該モータに発生するトルクもしくは推力を算出するトルク・推力算出部と、前記モータに流れる電流とモータ速度との一方または両方に基づき損失Lを算出し、前記モータ速度と前記トルク・推力算出部が算出したトルクもしくは推力との積から出力Wを算出し、瞬時電力Pを、損失Lと出力Wとの和L+Wが、L+W≧0のときはP=L+Wと算出し、L+W<0のときはP=0と算出する電力算出部とを備えた。
(もっと読む)
駆動制御装置
【課題】第一インバータ及び第二インバータからの合計リップル電流を低減して、コンデンサ及び直流電源線の発熱量を低減する駆動制御装置が求められる。
【解決手段】第一電動機に接続された第一インバータと、第二電動機に接続された第二インバータと、共通の直流電源と、直流電源に並列接続されたコンデンサと、を備えた駆動装置を制御する駆動制御装置であって、第一キャリア波を用いたパルス幅変調により、第一インバータのスイッチング素子をオンオフ制御する第一制御信号生成部と、第一キャリア波と同じ周波数の第二キャリア波を用いたパルス幅変調により、第二インバータのスイッチング素子をオンオフ制御する第二制御信号生成部と、2つの電動機が、共に力行する状態、又は共に回生する状態である場合に、第一キャリア波の位相と第二キャリア波の位相とを互いに4分の1周期ずらすキャリア位相制御部と、を備える駆動制御装置。
(もっと読む)
延伸装置の制御方法
【課題】延伸装置において、手動介入後の自動運転復帰で、各セクションの速度到達時刻がバラツキ、製品の延伸率にバラツキがでるため、製品むらが大きくなっていた。
【解決手段】延伸装置において、複数の延伸ロールは各々が増減速機を介して電動機によって駆動され、前記各電動機は駆動電流を検出する電流検出器と回転速度を検出する回転速度検出器を備え、前記電流検出器および前記回転速度検出器の検出信号はそれぞれ前記各電動機の駆動制御を行う駆動制御器に入力され、前記駆動制御器には延伸制御器から各延伸ロールの回転速度制御信号が入力されており、前記駆動制御器は前記回転速度制御信号に基づいて電動機の回転制御を行い、手動介入後の自動運転復帰時には、各延伸ロールの回転速度および加減速度は再計算され、設定速度到達時間の最も遅いものの設定速度到達時刻に、各延伸ロールが同時に設定速度に達するように設定されていることを特徴とする。
(もっと読む)
モーター駆動装置、モーター駆動方法およびプログラム
【課題】複数のモーターにより一連の作業を実行する機器における最大駆動電流を制限することのできるモーター駆動装置、モーター駆動方法およびプログラムを提供する。
【解決手段】複数のモーター(13−1,13−2,13−3,…)と、これらのモーターにそれぞれ駆動電流を供給する電流源(11)と、電流源(11)から複数のモーターに供給される電流値の制限値を設定する電流制限部(13−1,13−2,13−3,…)および駆動制御部(16)とを備え、駆動制御部は、複数のモーターの各々に対して、そのモーターが行おうとする作業ごとに、その作業に必要なトルクに対応して、そのモーターに供給される電流値の制限値を電流制限部に設定する。
(もっと読む)
モーター駆動装置、モーター駆動方法およびプログラム
【課題】複数のモーターにより一連の作業を実行する機器における最大駆動電流を制限することのできるモーター駆動装置、モーター駆動方法およびプログラムを提供する。
【解決手段】複数のモーター(13−1,13−2,13−3,…)と、これらのモーターにそれぞれ駆動電流を供給する電流源(11)と、複数のモーターの各々の駆動を制御する駆動制御部16とを備え、複数のモーターはそれぞれ、他のモーターとの同時駆動を可能とする第1の駆動条件と、他のモーターの駆動条件によっては当該他のモーターとの同時駆動を可能とする第2の駆動条件と、他のモーターとの同時駆動が許容されない第3の駆動条件とのうち、前記第2の駆動条件を含む2以上の駆動条件で動作が可能であり、駆動制御部16は、新たに駆動させようとする対象モーターについて、他のすでに駆動されているモーターの駆動条件を応じて、駆動の可否を判断する。
(もっと読む)
電動乗用車両
【課題】道路の状況に応じて軽快に走行できる上に、発進時に急発進することを防止して運転者の安全を確保することのできる電動乗用車両を提供する。
【解決手段】前輪2又は後輪3の何れか一方が一輪で構成されるとともに、前輪又は後輪の何れか他方が一輪以上で構成され、前輪及び後輪のそれぞれが別個独立の電動モータM1、M2で駆動するように構成された乗用電動乗用車両において、前輪及び後輪の駆動を制御する制御手段13を備え、制御手段13は、現実の走行に必要な電動モータの出力トルクが予め設定された基準トルク値以下の状態で前輪又は後輪の何れか一方の電動モータを駆動し、現実の走行に必要な電動モータの出力トルクが基準トルク値よりも大きい状態で前輪及び後輪の電動モータを駆動するように構成されている。
(もっと読む)
ネット制御の電動モータ
【課題】 従来のモータユニットでは、各モータに専用のインバータを備え、複数台を並設しているが、各モータに停止する位置決めとか、正転逆転で移動して距離を出すネットワーク制御をするには複雑な回線になり、制御の作成時間も掛かり、ミスの発見も難しくなり事故の原因になる欠点があった。本発明では、別途に第二制御盤を備え、第一制御盤を補助する構成とするネットワーク制御を提供する。
【解決手段】 本発明では、複数台の駆動部をネットワーク回線で連結し、パソコン20で一括管理する制御回路において、前記駆動部は、インバータを介して電動モータ8をネットワーク回線により形成する第一制御盤12を備え、前記電動モータ8を補助する回転環境を制御可能にする第二制御盤13を備え、前記第一制御盤12に第二制御盤13を連結して、電動モータ8の回転で搬送物を指定位置に移動可能にする構成とする。
(もっと読む)
汲み上げポンプ及び汲み上げポンプの駆動方法
【課題】コスト的な無駄が非常に少なく、またエネルギの使用効率の高い(省エネ性の高い)運転のできる汲み上げポンプを得る。
【解決手段】駆動源Doと、該駆動源Doによって駆動されるインペラ軸16と、該インペラ軸16と共に回転することによって液状体をくみ上げるインペラ20と、を備えた汲み上げポンプ12において、前記駆動源Doとして、インペラ軸16と連結され起動時に先に起動される補助モータ(第1の駆動機)21と、インペラ軸16と連結され補助モータ21よりも後に起動される主モータ(第2の駆動機)22とを備え、起動後においても、補助モータ21と主モータ22の双方がインペラ軸16と連結されたまま該インペラ軸16を駆動する。
(もっと読む)
部品実装機
【課題】装備されているモータが減速停止するときに生じる回生電力を有効利用して従来よりも消費電力を削減した部品実装機を提供する。
【解決手段】部品採取部材と基台との間に移動可能に介在されそれぞれモータ4X、4Zによって駆動される複数の移動部材2X、2Zを備え、部品採取部材が部品を採取および実装する部品実装機1において、各モータ3X、3Zが減速するときに運動エネルギを回生して生じた回生電力PR1〜PR3を制御する回生電力制御部6と、回生電力制御部6と電力をやりとりする各モータの電源部5X、5Zと、2つの移動部材2X、2Zが移動する場合に、一方の移動部材の減速停止の開始タイミングまたは減速停止中の所定タイミングに同期して他方の移動部材の始動加速を開始させ、一方のモータから得られる回生電力PR2を他方のモータの起動に利用する(駆動電力PZ)ように回生電力制御部6を制御する制御部7と、を備える。
(もっと読む)
遠心分離装置及びその運転方法
【課題】遠心分離装置において通常運転時に停電が発生することに起因して生じる課題を解決する
【解決手段】遠心力の作用により被処理液を固形物と分離液とに分離する回転ボウルと、回転ボウル内に配置され、回転ボウルと相対的な差速をもって回転されるコンベアと、回転ボウルに連結された主駆動モータと、コンベアに連結されたバック駆動モータと、電源と主駆動モータとの間に電気的に接続される主駆動側インバータ装置と、電源とバック駆動モータとの間に電気的に接続されるバック駆動側インバータ装置と、を備えた遠心分離装置の運転方法であって、停電が発生すると、慣性力で回転する回転ボウル及びコンベアによって主駆動モータ及びバック駆動モータで生成される回生電力を、バック駆動側及び/又は主駆動側インバータ装置の制御電源及び動力電源に給電して回転ボウルとコンベアとが相対的な差速をもって回転する状態を維持しながら減速させるようにする。
(もっと読む)
電気車制御装置
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更を不要とし、電力変換回路の数を抑制して車体の振動乗り心地を改善する。
【解決手段】車体が搭載される2台の台車のうち,前方の台車の前方の車輪を駆動する電動機と後方の台車の前方の台車を駆動する電動機とが並列接続され,前方の台車の後方の車輪を駆動する電動機と後方の台車の後方の車輪を駆動する電動機とが並列接続され,2組の並列接続した電動機の組み合わせに対し逆方向の振動トルクが重畳するように制御することにより電動機のトルク変動を用いて2台の台車に同一の上下力を発生させてそれぞれの台車の上下振動を抑制することにより車体が前後線対称形状に弾性変形する振動を間接的に抑制することを特徴とする電気車制御装置。
(もっと読む)
モータ制御装置、及び、モータ制御方法
【課題】1つのフルブリッジ型MERSで、複数のモータをソフトスタートさせて定格運転に移行させるモータ制御装置、及び、モータ制御方法を提供する。
【解決手段】モータ制御装置10は、フルブリッジ型MERS100と、線路150と、制御回路200と、複数の接続スイッチSWMiから構成され、交流電源VSと複数のモータMiの間に接続される。接続スイッチSWMiはそれぞれモータMiとフルブリッジ型MERS100と線路150に接続される。制御回路200は、フルブリッジ型MERS100を構成する4つの逆導通型半導体スイッチSW1乃至SW4と、接続スイッチSWMiを切り替えることによって、モータMiを1つずつソフトスタートさせて定格運転に移行させる。
(もっと読む)
1 - 20 / 89
[ Back to top ]