
Fターム[5H572LL22]の内容
Fターム[5H572LL22]の下位に属するFターム
二次電流 (1)
Fターム[5H572LL22]に分類される特許
101 - 120 / 261
電力制御装置
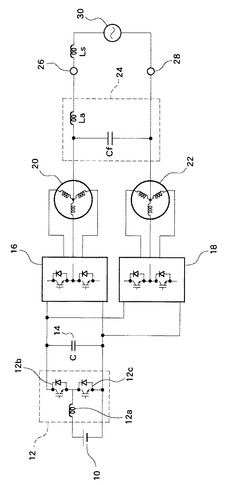
【課題】インバータのスイッチングにより発生する電流リプルを抑制する。
【解決手段】電池からの直流電圧をインバータ16,18で変換した交流電力によって駆動される2つのモータ20,22を有する。この2つのモータ20,22の中性点間に、接続端26,28を介し商用電源30を接続する。インバータ16,18で零相電圧を発生させてモータの中性点間電圧を制御して、商用電源30によって電池を充電する。中性点間に接続されたフィルタコンデンサCfと、このフィルタコンデンサCfと前記接続端26,28との間に配置されるリアクトルLaと、を有する。
(もっと読む)
同期制御装置

【課題】高周波のノイズ成分を増大させることなく主状態量のフィードバック値に含まれる位相の遅れ分をキャンセルするように位相を進め,現在の正確な主状態量が得られなくても,従制御対象の状態量を振動や遅れなく精度良く主制御対象の状態量に追従できる同期制御装置を提供する。
【解決手段】 主状態量が主状態量指令に一致するように主操作量を生成する主制御器と,前記主状態量と前記従状態量が同期するように従状態量指令を生成する従状態量指令生成器と,従状態量が従状態量指令に一致するように従操作量を生成する従制御器と,を備えた同期制御装置において,従状態量指令生成器は,主操作量と前記主状態量に基づいて主状態量よりも位相の進んだ位相進み主状態量を生成する位相進み補償演算器(11)と,位相進み主状態量を前記従状態量指令に変換する指令変換器(15)とを備えた
(もっと読む)
出力制御装置、画像形成装置および出力制御方法
【課題】出力量の初期値によらず、平均して一定の出力ができる出力制御装置、画像形成装置、出力制御方法を提供する。
【解決手段】記憶手段は、制御対象となる第1の機器が出力する第1の出力量を補正するための第1の補正量と、第1の出力量を補正するための第1の補正量とは異なる第2の補正量とを記憶する。調整手段は、第1の機器によって出力された第1の出力量が、第1の出力量の目標値である第1の目標値未満である場合には、第1の出力量により動作する第2の機器が出力する第2の出力量と、第2の出力量の目標値である第2の目標値と、第1の補正量とに基づいて第1の出力量を補正し、第1の出力量が第1の目標値以上である場合には、第2の補正量に基づいて第1の出力量を補正する。制御手段は、補正した第1の出力量を出力するように第1の機器の出力を制御する。
(もっと読む)
ファン駆動装置
【課題】 ファンを駆動する際に、必要な風量を維持しつつ、電力、騒音が最も有利になる様に制御する。
【解決手段】 ファン65−3の駆動電圧をΔVずつ増加させ、そのときのファンの駆動電流の増加量を電流検出部66により検出し、電流増加量ΔInが所定値以下となる駆動電圧を決定し、決定した駆動電圧でファンを駆動する。
(もっと読む)
回転電機駆動制御装置
【課題】縮退運転時の短絡電流によるモータジェネレータ駆動回路の素子故障の拡大を、より確実に防止することができるモータジェネレータ駆動制御装置の提供。
【解決手段】2つのモータジェネレータの回転数、および、それに接続された各インバータ装置の異常を、縮退運転指示部310によりそれぞれ検出する。そして、異常が検出されると、制御装置300は、異常が検出されたインバータ装置の作動を停止して、該インバータ装置に接続されたモータジェネレータが他のモータジェネレータにより連れ回される状態となるような運転指令を出力する。回転数指示部330は、連れ回されているモータジェネレータの回転数N1が所定許容回転数N1maxを超えたときに、異常でないインバータ装置に接続されたモータジェネレータの回転数N2を減少させるような運転指令(回転制御)を出力する。
(もっと読む)
旋回駆動制御装置及びこれを含む建設機械
【課題】電動機及びインバータを大型化することなく、大型の建設機械にも搭載可能な旋回駆動制御装置及びこれを含む建設機械を提供することを課題とする。
【解決手段】前記旋回機構に機械的に接続される第1電動機及び第2電動機と、前記旋回機構の操作部を介して入力される操作量に基づき、前記第1電動機の回転速度を制御するための速度指令を出力する速度指令出力部と、前記第1電動機の回転速度を検出する回転速度検出部と、前記速度指令出力部から出力される速度指令と、前記回転速度検出部によって検出される回転速度とに基づき、前記第1電動機を駆動するための駆動指令を生成する駆動指令生成部と、前記駆動指令生成部によって生成される駆動指令を用いて前記第1電動機を駆動制御する第1駆動制御部と、前記駆動指令生成部によって生成される駆動指令を用いて前記第2電動機を駆動制御する第2駆動制御部とを含む。
(もっと読む)
交流電動機の監視装置
【課題】電流振幅の影響を受けにくく、検出精度の高い交流電動機の監視装置を得る。
【解決手段】交流電源2から複数のヒステリシスモータ3にそれぞれ流れる個別電流を検出する個別電流検出手段例えば個別電流検出器5と、交流電源2から交流電動機3全体に流れる全電流を検出する全電流検出手段例えば全電流検出器4と、全電流検出器4及び個別電流検出器5によって同時に検出された電流検出値のうち、全電流検出値を基準とし、個別電流検出値との電流位相差がヒステリシスモータ3によって決められる異常判定レベル(規定値)を超えた時、ヒステリシスモータ3が異常と判定する判定手段例えば監視回路7を備えたもの。
(もっと読む)
鉄道車両駆動制御システム
【課題】2台の2レベルPWMコンバータの直流電圧間にアンバランスが発生しないように制御して、永久磁石電動機を低速回生運転モードでも中断することなく運転継続できる鉄道車両駆動制御システムを提供する。
【解決手段】本発明の鉄道車両駆動制御システムは、コンバータ制御部30が変圧器41の低電圧側巻線43に交流電源と位相が90度ずれた無効電流が流れるように2台の2レベルPWMコンバータ31,32を動作させた上で、2台の2レベルPWMコンバータの直流側電圧の差と変圧器の低電圧側巻線の電流瞬時値とに応じて2台のPWMコンバータの交流出力電圧指令を補正し、補正後の交流出力電圧指令にて2台の2レベルPWMコンバータの各々を動作制御することで、2台の2レベルPWMコンバータの直流電圧間にアンバランスが発生しないようにした。
(もっと読む)
短絡相特定方法
【課題】モータ及びインバータにおける故障モードを検出してモータ制御装置の短絡相を特定する短絡相特定方法を提供する。
【解決手段】車両駆動装置1は、直流電源であるバッテリ15と、バッテリ15の電圧を昇圧するコンバータ14と、車両を駆動するMG1モータ11に接続されたインバータ28と、モータ又は発電機として機能するMG2モータ・ジェネレータ12に接続されたインバータ29と、モータを制御するモータ制御装置18と、を含んでいる。車両駆動装置1には、電圧計と、各インバータ28,29の無通電状態を判定する無通電判定器13,14と、インバータの各相アームからモータに印加される電流を検出する電流計41〜44と、が設けられており、これらの信号及び無通電判定器14からの信号はモータ制御装置18へ送られる。
(もっと読む)
モータ制御装置及びその制御方法
【課題】インバータ制御における零点調整の精度を低下させることなく、故障モードを検出し、故障状況に対応して、他のモータによる走行を可能とするモータ制御装置及びその制御方法を提供する。
【解決手段】車両駆動装置1は、直流電源であるバッテリ15と、バッテリ15の電圧を昇圧するコンバータ14と、車両を駆動するMG1モータ11に接続されたインバータ28と、モータ又は発電機として機能するMG2モータ・ジェネレータ12に接続されたインバータ29と、モータを制御するモータ制御装置18と、を含んでいる。車両駆動装置1には、電圧計と、各インバータ28,29の無通電状態を判定する無通電判定器13,14と、インバータの各相アームからモータに印加される電流を検出する電流計41〜44と、が設けられており、これらの信号及び無通電判定器14からの信号はモータ制御装置18へ送られる。
(もっと読む)
多軸モータ制御システム
【課題】CPUの演算能力が高くない場合にも、多軸での高速、高加速でのモータ駆動を可能として、高い制御性能と低コストを両立させる。
【解決手段】1台のCPU42で複数のモータ10の制御演算を行なう多軸モータ制御システムにおいて、速度の立ち下がり以外の区間と立ち下がり区間を識別する速度区間識別手段(速度区間検出部42F、位置指令演算部50)と、電流指令補償分を設定する補償量設定手段(補償量演算部42G、補償量記憶部42J)と、速度の立ち下がり以外の区間では電流指令に電流指令補償分を加算し、速度の立ち下がり区間では電流指令に電流指令補償分を加算しない電流指令補償手段(スイッチ部42H、可変ゲインアンプ42K)と、を備える。
(もっと読む)
ファンモータの故障検出装置、ファンモータの故障検出方法及び筐体冷却装置
【課題】電源電流の変動の影響を受けることなくファンモータの拘束による故障が生じたことを確実に検出する。
【解決手段】ファンモータの故障検出装置40を備える筐体冷却装置10は、筐体Bの内部空間の空気と外部空間の空気を熱交換する熱交換器20と、筐体Bの内部空間の空気を熱交換器20に送出する第1ファンモータ31と、筐体Bの外部空間の空気を熱交換器20に送出する第2ファンモータ32と、ファンモータの故障検出装置40とを備えている。故障検出装置40は、制御装置41と、第1及び第2ファンモータ31,32に流れる各電流を計測する第1及び第2電流計測器42,43とを備え、制御装置41により第1及び第2電流計測器42,43により計測される一方の電流値から他方の電流値を減じた値が所定のしきい値を超えたときに一方の電流値が計測された第1または第2ファンモータ31,32の拘束による故障が生じたと判断する。
(もっと読む)
駆動装置およびこれを搭載する車両並びに駆動装置の制御方法
【課題】複数の電動機のいずれかに異常が生じている状態でシステムオフするときに、複数の電動機に対するすべての平滑用コンデンサの充電電荷を放電する。
【解決手段】システムオフ時に前輪用モータ24,26,モータ36のうちいずれかのモータに異常が生じているときには、電源用のリレー55,55a,56をオフし、正常な一つのモータに対するリレーを除いて他のリレーをオフすると共に異常が生じているモータに対するリレーをオンし、異常が生じているモータを除いてモータにd軸電流が流れるよう対応するインバータのスイッチング素子をスイッチング制御し、平滑コンデンサ43,45,47の端子間の電圧が値0に至る順に対応するインバータをゲート遮断し、インバータ42,44,46の全てがゲート遮断されたときに前輪用モータ24,26,モータ36のすべてのモータに対するリレー57a,58a,59aをオフする。
(もっと読む)
回転電機制御システム及び車両駆動システム
【課題】電圧変換部の故障を検出した場合に、平滑コンデンサの保護を目的としてモータとして働く回転電機が発生するトルクを制限する回転電機制御システムにおいて、例えば発進時に所要のトルクを発生することが可能な回転電機制御システムを得る。
【解決手段】直流電源、回転電機、周波数変換部、電圧変換部、トルク制限部を備えた回転電機制御システムにおいて、電圧変換部の停止を必要とする異常を検出する異常検出部を備え、当該異常検出部が異常を検出した場合に、トルク制限部が前記回転電機の回転速度が0未満の回転速度下限閾値未満の領域で正トルクの発生を制限し、正トルクを発生する領域を回転速度下限閾値以上の領域に設定する。
(もっと読む)
電動機制御方法及び電動機制御装置
【課題】空転滑走時の連れ回りに対する全く新しい制御方式による解決手法を提案すること。
【解決手段】 力行時には、制御対象2軸のうち、進行方向最後方の第2軸の電動機IM_2のトルク成分電流から、進行方向最前方の第1軸の電動機IM_1のトルク成分電流を減算した電流差ΔIq_rを用いた制御を行う。具体的には、空転滑走の発生を検知した場合に、その検知時の電流差ΔIq_rを保持し、これに所定の係数K1を乗じた値を連れ回り防止引き下げ指令Iq_Rとして、トルク成分電流指令値Iq*からの引き下げ指令とする。
(もっと読む)
電動機制御方法及び電動機制御装置
【課題】空転滑走発生時のトルクのアンバランスを抑制するための新たな技術を提案すること。
【解決手段】主電動機信号切替部220は、現在の走行状態が力行であれば、進行方向最後方軸である第2軸を基準軸として、第2軸の電動機電流及び回転子角周波数をもとに磁束成分電流フィードバック値Id*と、トルク成分電流フィードバック値Iq*と、電動機の回転子角周波数ωr*とを算出する。現在の走行状態が制動であれば、主電動機信号切替部200は、進行方向最前方軸である第1軸を基準軸として、第1軸の電動機電流及び回転子角周波数をもとに磁束成分電流フィードバック値Id*と、トルク成分電流フィードバック値Iq*と、電動機の回転子角周波数ωr*とを算出する。
(もっと読む)
駆動力制御装置
【課題】小型の電気自動車に適した走行安定性の向上を図ることができる駆動力制御装置を提供する。
【解決手段】横加速度センサ41から横加速度52を入力し(S1)、横加速度52の作用方向から旋回方向を判別する(S2)。左旋回の場合(S3)、横加速度52が所定横加速度以上であり所定値71を越えているか否かを判断し(S4)、所定値71未満の場合、外輪側である右ホイールインモータ22の供給電流を低下し、右ホイールインモータ22から出力される駆動力を低下する(S5)。これにより、左ホイールインモータ21で駆動される左フロントタイヤ14と右ホイールインモータ22で駆動される右フロントタイヤ15とにおいて、左右駆動力差ΔFが発生し(S6)、この左右駆動力差ΔFにより電気自動車2に旋回復元モーメント(M)を発生させる(S7)。
(もっと読む)
モータ駆動装置
【課題】半導体スイッチ素子が故障した側のモータをV結線にし、直流入力端子電圧を昇圧しながら継続運転を可能にする。
【解決手段】電力変換器105,106、交流モータ102,103、直流電源100、入力側中性点スイッチ104a,104b、モータ中性点スイッチ101a,101b、制御装置111を備え、この制御装置111は、故障素子判定部207と、故障相の出力端子と直流入力端子の中性点とを接続するべくスイッチ104a,104bを動作させるスイッチ駆動部208と、故障素子を含む電力変換器に接続されたモータの中性点と電源100とを切り離すべくスイッチ101a,101bを動作させるスイッチ駆動部209と、V結線されたモータを駆動するために、故障素子を含む電力変換器に対する駆動信号を生成する信号切替制御部205、PWMパルス生成部206等を備える。
(もっと読む)
多軸ロボット用電源回路およびその電源回路の遮断方法
【課題】簡潔な配線で安価で信号伝達の遅れを考慮する必要がなく、信号線の断線ですべてのモータ電源をオフにする多軸ロボット用電源回路を提供する。
【解決手段】 モータ電源遮断回路を駆動する安全ユニット10において、第1入力回路11に入力信号があるとき正常とする出力信号をCPU12と論理回路13に入力し、CPU12は入力信号が入ると出力信号を論理回路13とモータ電源遮断回路19に入力し、論理回路13は2入力で1出力を第1出力回路14に入力し、第2入力回路16に入力信号があるとき正常とする出力信号をCPU12と第2出力回路17に入力し、第1入力回路11または第2入力回路16に入力が断たれると出力を出さなくなることにより、CPU12がモータ電源遮断回路19を遮断動作させる。
(もっと読む)
インホイールモータ
【課題】より高いエネルギー効率を実現することができるインホイールモータを提供すること。
【解決手段】本発明によるインホイールモータ1は、車輪の内周側に配置された車輪毎の回転電機2と、回転電機2を駆動する駆動回路C1と、駆動回路C1に電力を供給する電源Eと、電源Eの充電率Rを検出する充電率検出手段44aと、慣性回転体42と、慣性回転体42を回転させる付加回転電機31と、電源Eの供給する電力により付加回転電機31を駆動する付加駆動回路C2と、充電率Rが所定値α以上である場合に付加駆動回路C2により付加回転電機31を駆動させる制御手段44cを備えることを特徴とする。
(もっと読む)
101 - 120 / 261
[ Back to top ]