
Fターム[5H572LL22]の内容
Fターム[5H572LL22]の下位に属するFターム
二次電流 (1)
Fターム[5H572LL22]に分類される特許
121 - 140 / 261
負荷駆動装置

【課題】電力変換器の出力電圧波形を歪ませることなく、負荷に対して所要の電力を供給可能とした負荷駆動装置を提供する。
【解決手段】正負極間にコンデンサCd1,Cd2が接続された直流母線を共通にして半導体電力変換器110,120が並列に接続され、各電力変換器110,120がその交流側に接続された負荷としての電動機M1,M2を個別に駆動するようにした負荷駆動装置において、電動機M1,M2の中性点に各一端が接続されたスイッチS1,S2と、これらのスイッチS1,S2の各他端と前記直流母線の負極との間に接続された直流電源300と、各スイッチS1,S2にそれぞれ対応する電力変換器110,120の出力電圧指令値を用いて各スイッチS1,S2のオンオフを切り替えるモード切替部211と、を備える。
(もっと読む)
モータ駆動装置およびハイブリッド駆動装置

【課題】複数のモータを備えたモータ駆動装置およびハイブリッド駆動装置において、1つのモータの異常発生時に実行される他のモータを用いた退避運転での過電流発生の防止および退避運転による移動距離の増加を両立する。
【解決手段】インバータ14に短絡故障が発生した場合には、モータジェネレータMG2による退避運転が実行される。MGECU300は、退避運転時には、位置センサ22の検出値から算出したモータジェネレータMG1の回転数が所定の基準回転数を超える場合には、電源線に対して短絡故障したスイッチング素子と並列接続されるスイッチング素子をすべてオンさせる。回転数が基準回転数以下の場合には、MGECU300は、短絡故障したスイッチング素子と直列接続されるスイッチング素子のみをオンさせる。これにより、退避運転を制限することなく、インバータ14における過電流の発生を防止できる。
(もっと読む)
電動機駆動システム
【課題】機械的に接続された2台以上の電動機を可変速駆動する際、速度センサを用いずに、2台以上の電動機にかかる負荷に応じて、それぞれの回転速度変動分を簡単に一定に保つ制御を可能とする電動機駆動システムを提供する。
【解決手段】電動機駆動システムにおいて、電流検出部4a、4bの検出電流とそれに相当する電動機の電流指令値に応じて、電動機2a、2bのそれぞれの速度変動推定値を演算する速度変動分演算部A16a、速度変動分演算部B16bと、速度変動分演算部A16a、速度変動分演算部B16bで演算された、それぞれの速度変動推定値が互いに同じ所定値になるように、電動機2a、2bへの印加電圧の大きさを補正する値を出力する速度均一化電圧補正演算部17とを備えた。
(もっと読む)
モータ制御装置
【課題】複数の軸制御部で単一のフルクローズド用の位置センサの情報を使用しようとすると、軸制御部間の信号の中継遅れによる、位置制御ループのゲイン低下が発生する。また、駆動モータと前記センサ間の機械的な伝達機構の差異により、設定可能な位置のフルクローズドループゲインが異なるために、モータ毎のセミクローズド位置フィードバックゲインが、前記のゲイン上限の影響を受けて、低下してしまうという課題があった。
【解決手段】第1の軸制御部から、他の軸制御部に、フルクローズド位置フィードバックに基づく速度指令を引き渡すとともに、他の軸制御部では、各軸モータ位置から求めたセミクローズド位置フィードバックに基づく速度指令と、前記第1の軸制御部からの速度指令とを調停して使用するようにする。
(もっと読む)
船舶用インバータシステム
【課題】複数のインバータで駆動する多巻誘導電動機において、インバータの数を減らして駆動する場合の電動機速度制御の応答速度を改善する船舶用インバータシステムを提供する。
【解決手段】船舶の主推進用誘導電動機へ1次電流を供給する複数のインバータと、前記各インバータに駆動される非推進装置用誘導電動機と、主推進用誘導電動機の速度検出器および電流検出器と、トルク電流成分指令信号を出力する速度制御器と、主推進用誘導電動機と導通しているインバータの台数信号に基づいて磁束指令信号に乗ずるゲイン信号を出力する磁束指令補正器と、からなる船舶用インバータシステムであって、インバータは速度検出信号と電流検出信号とトルク電流成分指令信号と磁束指令信号と磁束指令信号に乗ずるゲイン信号に基づいたベクトル制御演算により操作されるので、インバータの台数が減少しても、主推進用誘導電動機の速度制御の応答速度の低下を抑制できる。
(もっと読む)
同期制御システム、制御装置及び同期制御方法
【課題】複数の制御装置により構成される同期制御システムにおいて、同期運転を実現する際に、安全性を確保すると共に、システム全体として煩雑さを解消し、コストを低減する。
【解決手段】サブマスタ及びスレーブの制御装置10−2〜10−nは、マスタの制御装置10−1により送信された同期カウンタ値Vに基づいて、自らの基準カウンタ値Uを調整し、同期運転を行う。サブマスタの制御装置10−2は、同期カウンタ値Vを受信することができない場合、サブマスタからマスタにモードを切り替え、自らのカウンタ122のカウンタ値をスレーブの制御装置10−3〜10−nへ送信する。スレーブの制御装置10−3〜10−nは、新たなマスタの制御装置10−2からのカウンタ値に基づいて基準カウンタ値Uを調整し、制御装置10−2〜10−nの同期運転を維持する。
(もっと読む)
モータ制御装置
【課題】 複数のステッピングモータを駆動制御するモータ制御装置において、ステッピングモータの回転動作時の最大消費電力を低減できるとともに、ステッピングモータの回転動作の指示に応じて即座に回転動作を開始させることを可能とする。
【解決手段】 記録紙収納部414、415から記録紙を給紙するそれぞれのローラを駆動するステッピングモータ601、602は選択的に回転動作させられる。ステッピングモータ601、602のいずれも回転動作させないとき、ステッピングモータ601、602に対し、ロータとステータの位相状態を保持するための保持電流を供給させ(状態(1)、(4)、(7))、ステッピングモータ601、602のいずれかを回転動作させるとき、回転動作させないステッピングモータへの保持電流の供給を停止する(状態(2)、(5))。
(もっと読む)
記録装置
【課題】複数種類のモータを用いる場合にも正確な駆動制御を行うことができる小型のドライバ回路を備えた記録装置を提供することである。
【解決手段】第1の種類のモータと第2の種類のモータをそれぞれ駆動する同じ構成の複数のドライバ回路それぞれは、次の構成を有する。即ち、制御対象となるモータに直列に接続された外部抵抗に電流を流し、その電流を検出する第1の電流検出回路を備える。さらに、制御対象となるモータに流れる電流をカレントミラー回路に供給し、その回路のカレントミラー比率に従って得られる電流を、その回路に接続された外部抵抗に流し、その電流を検出する第2の電流検出回路を備える。またさらに、第1の電流検出回路と第2の電流検出回路のいずれかの電流検出の結果を選択するセレクタ回路と、その回路により選択された電流検出の結果に従って、制御対象となるモータに供給する電流を制御する制御回路とを有する。
(もっと読む)
複数のモータを制御するための回路
【課題】 簡単かつ低価格で、複数の直流モータを互いに独立して、かつ同時に制御することができる制御回路を提供する。
【解決手段】 この制御回路は、各直流モータ(M1、M2)に対して、対応する直流モータ(M1、M2)を制御するようになっている、第1のブランチ(3)および第2のブランチ(5)を有するHブリッジ(1A、1B)を備えている。このHブリッジ(1A、1B)の第2のブランチ(5)は、全てのHブリッジに共通のブランチを形成しており、かつ第1のブランチ(3)の各々への、対応する制御信号の印加によって、複数の直流モータ(M1、M2)を同時に、かつ互いに独立に制御することができるように、駆動電流の和に等しい電流を受けることができるような定格を有する2つのスイッチ(7、9)から成っている。
(もっと読む)
モータ駆動システム
【課題】個々に昇圧機能を有するモータ駆動装置の電気定数や運転状態に応じて、昇圧動作の責務を任意かつ動的に振り分けて回路損失の最小化を可能としたモータ駆動システムを提供する。
【解決手段】多相電圧形インバータINV1と、その直流入力端子に接続された平滑コンデンサC1と、インバータINV1の交流出力端子に固定子巻線がスター結線されたモータM1と、前記固定子巻線の中性点とインバータINV1の直流母線の一方との間に接続されたバッテリBATTと、を有し、かつ、バッテリBATTの電圧を昇圧して平滑コンデンサC1に供給する昇圧機能を備えたモータ駆動装置101,102を複数台備えてなるモータ駆動システムにおいて、モータM1,M2の中性点を共通接続すると共に、直流母線の正側及び負側をそれぞれ共通接続し、昇圧動作により各モータM1,M2の中性点に流れる零相電流の分配率を制御可能とする。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】搬送アクチュエータの振動を抑制すると共に、各駆動軸の回転動作が他の駆動軸に与える影響を低減する。
【解決手段】右搬送アクチュエータ32が伸縮動作する場合、中央制御装置10の制御部12は、縮み位置から伸び位置へ移動させるための位置指令を右搬送アクチュエータ制御装置30に出力し、現状を維持するための0°の位置指令を旋回アクチュエータ制御装置40に出力し、現状を維持するための距離0の位置指令を左搬送アクチュエータ制御装置20に出力する。右搬送アクチュエータ制御装置30は制振制御用の位置ゲインを用いて制振制御を行い、旋回アクチュエータ制御装置40は駆動軸42−Kが回転しないように維持制御を行い、左搬送アクチュエータ制御装置20は通常の位置ゲインを用いて駆動軸22−Kが回転しないように維持制御を行う。
(もっと読む)
電動機制御装置,駆動装置およびハイブリッド駆動装置
【課題】 1次側コンデンサを小型,低コストにするとともに、コンバータの2次側電圧を円滑に制御し、1次側電圧のリップルは防止する。
【解決手段】 1次側コンデンサ22は小容量ものとし、これによって回生時の1次側電圧Vdcにリップルを生じやすくなるので、力行時用には2次側コンデンサ23の容量に適合して2次側電圧を迅速かつ円滑に制御するための大きい値の第1ゲインを定め、回生時用には1次側コンデンサの小容量に適合して1次側電圧のリップルを回避する小さい値の第2ゲインを定める。しかも、電動機群全体としての動作モードが「力行」か「回生」か判定して、「力行」と判定すると第1ゲインを選択し、「回生」と判定すると第2ゲインを選択して、コンバータ40を、その出力電圧が目標電圧になるように、選択したゲインを用いてフィードバック制御する。
(もっと読む)
学習制御機能を備えた電動機の制御装置
【課題】所定の周期で繰り返される指令に基づいて電動機を制御する場合に、複数の電動機を使用して1つの被駆動体を高精度に駆動させることができる制御装置を提供する。
【解決手段】制御装置2は、第1電動機10の位置偏差が最小となるように位置偏差補正量を計算する第1学習制御器4と、第2電動機12の位置偏差が最小となるように位置偏差補正量を計算する第2学習制御器6とを有する。第1学習制御器4と第2学習制御器6とは互いに独立であり、それぞれの電動機の位置偏差を最小にすべく作用するが、学習制御の応答性を定めるパラメータは同じものが設定される。
(もっと読む)
多軸モータ制御装置とその制御方法
【課題】軸の追加や削除に対応でき、CPUの機能を最大限に発揮できる多軸モータ制御装置とその制御方法を提供する。
【解決手段】位置・速度制御処理をするCPU6と制御軸数を格納する制御軸数格納部12と制御周期を格納する制御周期格納部14とトルク指令をモータ制御部へ送信する第1通信部11とを備える多軸制御部2と、トルク指令を受信する第2通信部20とトルク指令とモータ電流から電圧指令を生成する電流制御部16と電圧指令を電力増幅しモータを駆動するモータ駆動部17とを備える多軸モータ制御装置において、多軸制御部は、制御軸数に応じた制御周期を格納した制御周期テーブル格納部15を、モータ制御部は、ID格納部18を備え、定常運転前に全てのIDを読み出して、制御軸数格納部に格納、制御周期テーブル格納部から対応した制御周期を読み出して制御周期格納部に格納するようにした。
(もっと読む)
重機の制御
本発明は、例えばタービンまたはプロペラなどの回転作業機械(P)の回転速度を制御するためのシステムであって、前記回転作業機械(P)は、少なくとも1台のモーター(M1)に連結され、前記モーター(M1)によって提供される所定の回転速度により回転されるように構成され、前記モーター(M1)は、制御システム(C)に接続され、前記モーター(M1)の前記回転速度は、前記制御システム(C)によって制御されるように構成されている。前記回転作業機械(P)は、調整可能に構成された負荷制御(PC)を有し、前記制御システム(C)は、前記回転作業機械(P)に接続されている。本発明により、選択可能な複数の回転速度の間でソフトに遷移を行うことができ、所要エネルギーの変更に合わせて前記モーター(M1)の前記サイズおよび回転速度をステップバイステップで調整してエネルギー消費を削減する。
【代表図】図1 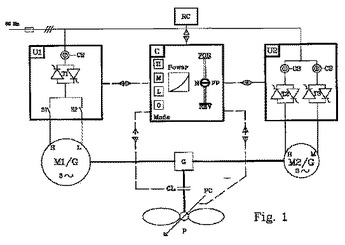 (もっと読む)
(もっと読む)
テンショニングメカニズムのための制御式電動モータ装置
【課題】 テンショニングメカニズム、特にストランド手段及び/又は歯車機構手段のためのテンショニングメカニズムを実現させることを目的とする、複数の電動モータを付けた電気駆動装置のための界磁指向制御方法と、この制御方法の実行に適した電動モータ装置を提供する。更に、この電動モータ装置の運転方法を提供する。
【解決手段】 2つの同期モータをその相巻線でもって直列接続し、そこで、その両方の磁極ホイールと回転子磁束を互いに位相差又は角度差を付けて回転させる。両同期モータに、位置制御器及び/又は速度制御器を包含する共通の制御装置を割り当て、その起動制御のために電流変換器と結合させる。こうして、両同期モータに共通の電流変換器からそれぞれ同一の相電流を供給する。
(もっと読む)
電動車両の駆動システムの制御装置および制御方法
【課題】複数の駆動輪とモータユニットを備え、1つのモータユニットで異常が生じても、複数の駆動輪の各々の動作状態を一致させて電動車両の挙動を安定化させる。
【解決手段】電動車両の駆動システムの制御装置は、複数の駆動モータ31の各目標トルク指令値を運転者操作と車両挙動に応じて演算する目標トルク演算手段32、目標トルク演算手段から出力された各指令値に基づいて複数の駆動モータの各々を制御するモータ制御手段33、複数の駆動モータあるいは複数の駆動モータの駆動経路のうち少なくともいずれか1つに異常が発生したときに異常を検知する異常検知手段34、検知された駆動モータあるいは駆動モータの駆動経路に対応する駆動モータの動作状態を判別する動作状態判別手段35、動作状態判別手段により判別された駆動モータの動作状態に合わせて他の駆動モータの動作状態を制御する同期制御手段36とを備える。
(もっと読む)
電気車制御装置
【課題】電動機の指令トルクは本来、車両を所定の加速度で運転するために設定されたものであるが、空転検知で指令トルクを引き下げるという粘着制御アルゴリズムによって、空転時には自ずと所定の加速度が得られない状態になる。
【解決手段】車輪とレールのすべり速度に相当する車両速度と電動機回転速度の差速度を検知し、この値が所定値以下の間は通常のトルク制御を行い、所定のトルク指令値のままでは差速度の拡大が止まらない状態で、差速度の制限目標値との偏差に応じたトルク低減特性を付加した粘着制御アルゴリズムを適用する。空転状態にあっても所定の車両加速度を得ることを可能にする電気車制御装置を提供するものである。従来の粘着制御は図5の左側の接線力ピークを想定して、すべり速度を極力小さくするように制御していた。本発明は図5右寄りの接線力を利用可能にしたことで車両の加速度が確保でき、定時運行が可能になる。
(もっと読む)
モータ制御装置と制御定数調整方法
【課題】多軸サーボシステムにおいて、加減速動作時においても、所望の軸の応答を規範モデル部と同等にすることができるモータ制御装置を提供する。
【解決手段】速度指令とモータ速度の速度偏差からトルク指令を生成する速度制御部(102)とトルク指令に基づいてモータを駆動する電流制御部(103)とを備えた複数のモータ制御部(10)と、外部装置と内部の入出力処理を行なう入出力処理部(13)と、を備えたモータ制御装置において、速度指令とモデル速度のモデル速度偏差からモデルトルク指令を生成する速度制御モデル部と前記電流制御部の応答を模擬する電流制御モデル部とモデル速度を生成する積分器とを備える規範モデル部(11)と、モデルトルク指令の絶対値の積分値とモータ制御部から選んだ少なくとも一つのトルク指令の絶対値の積分値から速度制御部の制御定数を調整する制御定数調整部(12)と、を備えた。
(もっと読む)
負荷駆動制御回路
【課題】負荷の接続端子に生じ得る天絡や地絡をより確実に検出することができる負荷駆動制御回路を提供する。
【解決手段】各々のブリッジ回路5〜7にブリッジ状の抵抗群(抵抗18,19、抵抗22,23、抵抗26,27)を取り付けて、これらに電源Vccの電圧を印加する。そして、モータM1,M2の回転状態を停止と回転(正転、逆転)との間で切り換えるに際に、ブリッジ回路5〜7のブリッジ出力を一旦、全てハイインピーダンス状態にして、この時の抵抗群とブリッジ出力間から取り出した中間電圧Vv,Vh,Vcom変化を見ることで、モータM1,M2の出力ショート(天絡及び地絡)有無を判定する。
(もっと読む)
121 - 140 / 261
[ Back to top ]