
Fターム[5H572LL22]の内容
Fターム[5H572LL22]の下位に属するFターム
二次電流 (1)
Fターム[5H572LL22]に分類される特許
21 - 40 / 261
モータ駆動電流アンプとモータ駆動装置とその駆動方法とモータ駆動システム
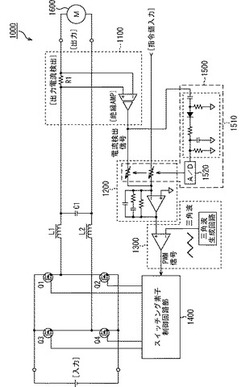
【課題】特性の異なる複数の種類のモータに対しても、信頼性高く良好に適用可能であり安定してモータを駆動できる、モータ駆動電流アンプとモータ駆動装置とその駆動方法とモータ駆動システムとを提供することを目的とする。
【解決手段】駆動対象となるモータへの出力電流リップルを検出する出力電流リップル検出部と、出力電流リップル検出部が検出した出力電流リップルに対応して、モータへの出力電流を制御する制御特性を変更するPID制御部と、PID制御部から出力信号が入力されて、PWM制御を遂行するPWM制御部と、PWM制御部から出力されるPWM信号に対応してスイッチング素子のオン・オフが制御されるフルブリッジ回路とを備えるモータ駆動装置とする。
(もっと読む)
数値制御装置

【課題】軸ごとの電力を正確に算出する数値制御装置を提供する。
【解決手段】コンバータ部110の出力電力を取得するコンバータ電力取得手段300と、モータ13−1〜13−Nの出力を軸ごとに算出するモータ出力算出手段310と、コンバータ出力電力とモータ出力の全軸に関する総和との差を全損失として算出する全損失算出手段340と、モータの損失を軸ごとに算出するモータ損失算出手段320と、アンプの損失を軸ごとに算出するアンプ損失算出手段330と、モータ損失とアンプ損失との和を軸損失として軸ごとに算出する軸損失算出手段350と、軸損失の全軸に関する総和に対する、軸毎の軸損失の比率に基づいて、全損失を軸毎に分配した損失を軸ごとに求める損失分配手段360と、モータ出力と分配軸損失との和を軸電力として軸ごとに求める軸電力算出手段370とを備える。
(もっと読む)
プラント制御装置及び厚板圧延システム
【課題】対象プラントの生産性を低下させることなく、モータの過熱保護による操業停止を確実に防止できるプラント制御装置を提供する。
【解決手段】モータ2を駆動するドライブ装置3と、モータ2の速度基準を生成し、その生成した速度基準をドライブ装置3に送信するコントローラ4とを有するプラント制御装置1において、RMS値計算手段6及び加減速レート調整手段9を備える。RMS値計算手段6は、モータ2のトルク電流の実効値を計算する。加減速レート調整手段9は、RMS値計算手段6によって計算された実効値が所定の規定値を超えている場合に、上記速度基準の加減速レートを調整し、モータ2の過熱保護による操業停止を防止する。
(もっと読む)
同期制御装置と同期制御方法
【課題】
複数の駆動系を同期制御する汎用性のある手法を提供する。
【構成】
複数の駆動系を目標指令に従って動作させるため、第1の駆動系に対し第1の操作量を発生させ、第2の駆動系に対し第2の操作量を発生させる。第1の駆動系での目標指令からの誤差と、第2の駆動系での目標指令からの誤差との偏差に比例する同期制御用の操作量を発生させ、第1の操作量に同期制御用の操作量を加算し、第1の駆動系を制御する。また第2の操作量に同期制御用の操作量を加算し、第2の駆動系を制御する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】1つの駆動回路によって、三相モータと2つの直流モータとを駆動することが可能となるモータ制御装置を提供する。
【解決手段】テレスコピックモータ8は、U相配線15とV相配線16との間に、第2の給電回路21,22およびテレスコピック用リレーR1を介して接続されている。チルトモータ9は、V相配線16とW相配線17との間に、第3の給電回路22,23およびチルトリレーR2介して接続されている。第6モードでは、第1および第6のFET1、FET6がオン状態とされ、第4のFET4と第3のFET3とが交互にオンオフされるとともに、これと同期してテレスコピックリレーR1とチルトリレーR2とが交互にオンオフされる。
(もっと読む)
プロセス動作を保護するためのモータ保護システムの使用
【課題】プロセス動作を保護するためにモータ保護システムを使用する手法を提供する。
【解決手段】コントローラ220は、モータ保護測定値を使用して、リードモータ駆動式原動機120が故障しているかどうかを判定する。リードモータ駆動式原動機120が故障しているという判定に応答して、故障したリードモータ駆動式原動機120をトリップする前にラグモータ駆動式原動機130の動作をアクティブ化する。
(もっと読む)
モータ制御装置
【課題】応答性がよく、安定したタンデム制御によるモータ制御を行なうことができるモータ制御装置を提供する。
【解決手段】マスタ軸モータと少なくとも一つのスレーブ軸モータとを用いて、一つの軸を駆動するタンデム方式のモータ制御装置であって、モータ毎に位置制御部1と速度制御部2と電流制御部3とを具備し、さらにスレーブ軸にはマスタ軸のトルク指令値Tm*とスレーブ軸のトルク指令値とからスレーブ軸の調停トルク指令値Ts1*を算出するトルク調停部5と、スレーブ軸には上位制御装置からの指令の反転を検出する指令反転検出部23と、を備え、指令反転検出部23は、上位制御装置からの指令の反転を検出した場合、指令反転直前の調停トルク指令値Ts1*をスレーブ軸の速度制御部2の積分成分に設定することにより達成される。
(もっと読む)
電力変換装置
【課題】コンデンサのリップル電流を低減しつつ、スイッチング素子間の熱損失の偏りを低減する電力変換装置を提供する。
【解決手段】電力変換装置1は、第1インバータ部20および第2インバータ部30と、コンデンサ50と、マイコン51と、を備える。マイコン51は、第1デューティ中心値Dc1が出力中心値Rcよりも下側にシフトされ、第2デューティ中心値Dc2が出力中心値Rcよりも上側にシフトされる第1状態と、第1デューティ中心値Dc1が出力中心値Rcよりも上側にシフトされ、第2デューティ中心値Dc2が出力中心値Rcよりも下側にシフトされる第2状態と、をステアリングホイール91の操舵状態に応じて切り替える。これにより、コンデンサ50のリップル電流を低減しつつ、MOS21〜26、31〜36間の熱損失の偏りを低減することができる。
(もっと読む)
制御装置及び洗濯機
【課題】所定時間内に一の制御対象への制御指令を生成した後に、他の制御対象への制御指令を生成し、複数の制御対象を並列制御して、各制御対象のプログラムタスクを確実に処理する制御装置及び該制御装置を有する洗濯機を提供する。
【解決手段】タスク1は処理の開始時点から所定期間t1の間、MPUを獲得し、処理を完了する。またタスク1の処理の開始時点からT/2経過した時点で、タスク2の割込が発生し、タスク2は、割込時点から所定期間t2の間、MPUを獲得し、処理を完了する。MPUは、三角波Q1、Q2が極小値時点に位置する毎に、タスク1及び2の処理を開始する。三角波Q1と三角波Q2との位相は180度相違している。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】エンジンおよび、エンジンと動力分割機構を介して接続されたモータを備えるハイブリッド車両において、モータ異常発生時に、エンジン始動に伴なう反力による駆動力の変動を抑制してエンジンを用いた退避走行を可能とする。
【解決手段】第2の電動機の異常発生時には、第2の電動機の運転を停止させるとともに、エンジンおよび第1の電動機を用いた退避走行を実行させる。制御装置は、第2の電動機の異常発生が検知された場合に、第1の電動機からの動力により動力分割機構を介してエンジンを回転駆動することにより、エンジンを始動させる。また、制御装置は、第2の電動機に接続されるインバータのスイッチング素子を所定のスイッチングパターンに従ってオン・オフさせることによって運転停止中の第2の電動機から電磁気的な作用に基づく引きずりトルクを発生させることによりエンジン始動時に出力部材に生じる反力を相殺する。
(もっと読む)
モータ駆動システム
【課題】低コストにて、平滑コンデンサに耐圧以上の電圧が印加されるのを抑制する。
【解決手段】整流部32aは交流の電圧を整流し、平滑コンデンサ32cはこの電圧を平滑する。圧縮機用インバータ34は、平滑コンデンサ32cの出力側に接続されており、平滑された電圧を用いて圧縮機用駆動電圧を生成して圧縮機用モータM12に出力する。室外ファン用インバータ35aは、平滑コンデンサ32cの出力側において圧縮機用インバータ34に並列に接続されている。室外ファン用インバータ35aは、平滑された電圧を用いてファン用駆動電圧を生成して室外ファン用モータM18に出力する。MPU39は、圧縮機12において異常が発生した場合、圧縮機用インバータ34による圧縮機用駆動電圧の出力を停止させつつ、室外ファン用モータM18の負荷を上げるように室外ファン用インバータ35aの制御を行う。
(もっと読む)
車両用操舵装置
【課題】1つの駆動回路によって、電動パワーステアリング用モータとロック制御用モータとを駆動することが可能となる車両用操舵装置を提供する。
【解決手段】EPS用モータ6と駆動回路12とを接続するための給電経路には、当該給電経路を開閉するためのEPS用リレー18A,18Bが設けられている。ロックモータ10と駆動回路12とを接続するための給電経路には、当該給電経路を開閉するためのリレーR1,R3,R5が設けられている。これらのリレー18A,18B,R1,R3,R5と駆動回路12とは、制御部13によって制御される。
(もっと読む)
電動車両
【課題】複数のスイッチング素子の一部をオフからオンにできなくなるオフ異常が発生していないインバータにより駆動されるモータを用いて走行する状態に迅速に移行する機会を増やしつつ、オフ異常が発生していないインバータを判別する。
【解決手段】2つのモータが駆動されて走行している最中に、バッテリの充放電電流Ibが許容電流範囲外になって2つのインバータのうちのいずれかで1相オープン故障が発生したと判定されたときに(S100,S110)、第2モータのみが駆動されて走行する電動走行が行なわれるようにインバータを制御すると共に第1モータを駆動する方のインバータのゲート遮断を行なう(S120)。そして、電動走行が開始されてから所定時間tb1が経過するまでに充放電電流Ibが許容電流範囲外になったか否かによって、いずれのインバータに1相オープン故障が発生しているかを判定する(S130〜S180)。
(もっと読む)
駆動装置
【課題】単相モーターと二相モーターとを備えるものにおいて、信号を電圧に変換する信号変換器の数の削減する。
【解決手段】搬送モーター66を回転させると共にキャリッジモーター78aをADF読取回転角で停止させる際には、制御部52からは、信号DA0,DA1をD/A変換器90,91に出力すると共に通電許容禁止信号ENB1をキャリッジモーターA相駆動回路97に出力する。そして、D/A変換器90,91で信号DA0,DA1を電圧Vda0,Vda1に変換する。そして、搬送モータードライバー92では、電圧Vda0に基づいて搬送モーター66への通電を行ない、キャリッジモータードライバー95では、電圧Vda0と通電許容禁止信号ENB1とに基づいてA相への通電や通電停止を行なうと共に電圧Vda1に基づいてB相への通電を行なう。
(もっと読む)
車両制御装置
【課題】ゴムタイヤ等の低剛性体からなる車輪を駆動する誘導電動機が複数個接続された車両制御装置において、並列に複数個接続された各誘導電動機に流れる電流アンバランスによる特定電動機の過電流状態を抑制する。
【解決手段】各誘導電動機に流れる電流を用いて、電流アンバランスよる特定電動機の過電流を抑制する如くトルク制御の補正を行う。車輪を駆動する誘導電動機が複数個接続された車両制御装置において、複数個接続された各誘導電動機に流れる電流を検出する検出装置を備え、制御回路に接続し、検出した電流に応じてトルク指令を補正し、特定の誘導電動機の過電流を防ぐことを特徴とする。
(もっと読む)
真空ポンプ
【課題】本発明は、電動機の運転状態に応じて、永久磁石型同期運転と誘導電動機運転との切り替えを行い、運転性能の改善と電力消費の低減を実現する真空ポンプを低コストで提供する。
【解決手段】ロータケーシング内に配置されたポンプロータと、ポンプロータを回転させる回転軸と、回転軸の端部に連結され複数の永久磁石が配置され、かつ、複数の永久磁石の周囲に2次導体が配置された電動機回転子を有し、回転軸を駆動してポンプロータを回転させる電動機と、電動機の運転状態を検出する検出部と、検出部により検出された電動機の運転状態に応じて、永久磁石を用いて回転軸を駆動する永久磁石型同期運転と、2次導体を用いて回転軸を駆動する誘導電動機運転と、を切り換える制御部と、を備えることを特徴とする。
(もっと読む)
駆動制御装置
【課題】第一インバータ及び第二インバータからの合計リップル電流を低減して、コンデンサ及び直流電源線の発熱量を低減する駆動制御装置が求められる。
【解決手段】第一電動機に接続された第一インバータと、第二電動機に接続された第二インバータと、共通の直流電源と、直流電源に並列接続されたコンデンサと、を備えた駆動装置を制御する駆動制御装置であって、第一キャリア波を用いたパルス幅変調により、第一インバータのスイッチング素子をオンオフ制御する第一制御信号生成部と、第一キャリア波と同じ周波数の第二キャリア波を用いたパルス幅変調により、第二インバータのスイッチング素子をオンオフ制御する第二制御信号生成部と、2つの電動機が、共に力行する状態、又は共に回生する状態である場合に、第一キャリア波の位相と第二キャリア波の位相とを互いに4分の1周期ずらすキャリア位相制御部と、を備える駆動制御装置。
(もっと読む)
延伸装置の制御方法
【課題】延伸装置において、手動介入後の自動運転復帰で、各セクションの速度到達時刻がバラツキ、製品の延伸率にバラツキがでるため、製品むらが大きくなっていた。
【解決手段】延伸装置において、複数の延伸ロールは各々が増減速機を介して電動機によって駆動され、前記各電動機は駆動電流を検出する電流検出器と回転速度を検出する回転速度検出器を備え、前記電流検出器および前記回転速度検出器の検出信号はそれぞれ前記各電動機の駆動制御を行う駆動制御器に入力され、前記駆動制御器には延伸制御器から各延伸ロールの回転速度制御信号が入力されており、前記駆動制御器は前記回転速度制御信号に基づいて電動機の回転制御を行い、手動介入後の自動運転復帰時には、各延伸ロールの回転速度および加減速度は再計算され、設定速度到達時間の最も遅いものの設定速度到達時刻に、各延伸ロールが同時に設定速度に達するように設定されていることを特徴とする。
(もっと読む)
電動車両の電気システムおよびその制御方法
【課題】電動機の温度上昇の抑制と、車両駆動力の確保とを両立するように、コンバータの出力電圧を適切に設定する。
【解決手段】
コンバータ15の出力電圧VHは、モータジェネレータMG1を駆動制御するインバータ20およびモータジェネレータMG2を駆動制御するインバータ30に対して共通に与えられる。制御装置50は、モータジェネレータMG1,MG2の動作状態に応じて、出力電圧VHの指令値を設定する。出力電圧VHの電圧指令値は、走行制御に基づいて決められたモータジェネレータMG1,MG2の動作点に従った出力を確保するためのVH下限値と、モータジェネレータMG1,MG2の当該動作点でのモータ損失を最小とするためのVH候補電圧とのうちの最大値に従って設定される。
(もっと読む)
射出成形機
【課題】求められる制御精度がそれぞれ異なる複数のサーボモータをより効率的に集中制御する多軸サーボドライバを搭載する射出成形機を提供すること。
【解決手段】四つのサーボモータM1〜M4を集中制御する多軸サーボドライバEQを搭載する射出成形機において、その多軸サーボドライバEQは、それら四つのサーボモータM1〜M4のそれぞれに関する演算のために用いられる一のCPU資源を備える。また、その多軸サーボドライバEQは、それら四つのサーボモータM1〜M4の制御周期を個別に設定する制御周期設定部C13を備え、成形サイクル中にそれら四つのサーボモータM1〜M4のうちの少なくとも一つの制御周期が変化するように、それら四つのサーボモータのそれぞれの制御周期を設定することができる。
(もっと読む)
21 - 40 / 261
[ Back to top ]