
Fターム[5H680AA00]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 目的、効果 (1,903)
Fターム[5H680AA00]の下位に属するFターム
大トルク化 (161)
トルク均一化 (81)
高速化 (59)
低速化 (10)
高効率化 (351)
速応化 (68)
正逆転 (57)
起動、停止 (52)
共振周波数維持 (63)
耐熱ストレス (9)
耐久性、耐摩耗性、長寿命化 (235)
押圧力均一化 (137)
スリップ防止 (29)
振動、騒音防止 (112)
小型化、コンパクト化 (429)
冷却 (10)
Fターム[5H680AA00]に分類される特許
21 - 40 / 40
駆動制御装置及び駆動制御方法

【課題】レンズの焦点合わせ動作での固定駆動パルス数に基づくエラー対応処理における精度を向上させる。
【解決手段】所定方向に沿った圧電素子12の伸び速度と縮み速度とを異ならせるよう駆動パルスの供給を制御して圧電素子12を伸縮させることで駆動棒17を振動させ、駆動棒17に摩擦係合したレンズ21を所定方向に沿って移動させる駆動制御装置20において、焦点合わせ動作前に、所定移動距離だけレンズ21を移動させるに要した実駆動パルス数を測定する実駆動パルス数測定手段32と、実駆動パルス数と基準パルス数とに基づいて駆動パルス数に関する補正係数を算出する補正係数算出手段33と、測定されたAF評価値(コントラスト値)が最大となるレンズ21の位置を検出できなかった場合、予め設定された固定駆動パルス数を、上記算出された補正係数に基づいて補正する補正手段37とを備えた。
(もっと読む)
二次元移動装置

【課題】移動平面に垂直な方向の厚さを増やさないで被駆動体を二次元方向に並進運動させる圧電体振動子を提供する。
【解決手段】圧電体振動子30は、外壁部を有し、外壁部を、第1方向xに付勢する第1付勢部材(第3、第4摩擦部材21、22)を、振動に基づいて第1方向xと垂直な第2方向yに移動させ、外壁部を第2方向yに付勢する第2付勢部材(第1、第2摩擦部材11、12)を、振動に基づいて第1方向xに移動させる。
(もっと読む)
モータ駆動方法
【課題】 雲台カメラで超音波モータを使用する際、目標とする回転角度に応じて、定速部分がない形で、目標速度を計算すると、オーバシュートや急停止してしまい、駆動音発生の原因となる。
【解決手段】 回転速度を可変でき、目標角度を回転することが可能な、モータの駆動方法において、前記目標角度を入手し、加速時、定速時、及び・または減速時の回転角度を一定割合として、定速時の速度である、目標速度を求め、目標角度をst、加速時の加速度をx1、定数Kxとしたとき、目標速度v1=√(st*x1*Kx)で、目標速度v1を求めることを特徴とするモータ駆動方法。
(もっと読む)
モータ駆動制御装置及び方法
【課題】 簡単な処理により、理想的な速度カーブとなるようにモータ駆動制御を行うようにする。
【解決手段】 目標回転角度を設定して超音波モータ59の駆動を制御する際に、加速に関するパラメータの設定を行って、超音波モータ59を駆動開始し、加速に関するパラメータに従った加速駆動が終了した後、加速に関するパラメータに基づいて、減速に関するパラメータ、例えば減速開始位置や減速時間を決定する。
(もっと読む)
圧電アクチュエータの製造方法
【課題】屈曲状の複数の駆動部とこれら複数の駆動部にそれぞれ配置された圧電層とを有する圧電アクチュエータを、より簡単に製造することが可能な製造方法を提供すること。
【解決手段】まず、板状部材24に、複数の貫通状のスリット28を形成して複数の駆動部20を分割形成する。次に、板状部材24に圧電材料の粒子を堆積させることにより、複数の駆動部20に複数の圧電層26をそれぞれ形成する。そして、各圧電層26にその厚み方向の電界を印加するための個別電極27を形成してから、複数の駆動部20を、板状部材24の面方向と直交する方向に突出するように折り曲げる。
(もっと読む)
圧電デバイス、圧電デバイスの製造方法、及び電子機器
【課題】
振動体の振動により、移動体を摩擦駆動する超音波モータ及びそれを用いた電子機器に関し、特に駆動に用いる縦振動と屈曲振動の共振周波数が調整可能な振動体の構造及び調整方法に関する。
【解決手段】
そこで、本発明の超音波モータは、振動体には振動体に励振される屈曲振動の節近傍に付加質量部もしくは質量除去部を有する。もしくは振動体に励振される屈曲振動の腹近傍に付加質量部もしくは質量除去部を有する。もしくは振動体の長手方向略先端部には付加質量部もしくは質量除去部を有する構成とする。これにより縦振動及び屈曲振動の共振周波数を希望通りに修正する。
(もっと読む)
圧電アクチュエータモジュール、モータモジュールおよび装置
取り扱いが容易で薄型化が図れ、汎用性の高い圧電アクチュエータモジュールを提供する。 圧電アクチュエータモジュール10は、電極を有する圧電アクチュエータ本体21と、外部から駆動信号が入力され、前記電極に前記駆動信号を供給する信号入力端子18A〜18Dと、圧電アクチュエータ本体21と略同一平面上に配置され、圧電アクチュエータ本体21により駆動され回転運動する回転体22と、回転体22および前記信号入力端子が電気的に接続された前記圧電アクチュエータ本体を収納する筐体15と、筐体15より露出され、回転体22により直接的あるいは間接的に伝達された回転運動を外部に出力するための出力軸12と、を備える。 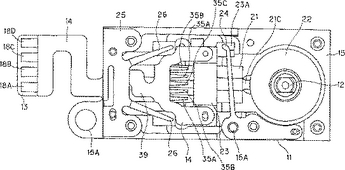 (もっと読む)
(もっと読む)
超音波モータ
【課題】温度上昇が生じにくく長寿命な超音波モータを提供する。
【解決手段】超音波モータ1は、超音波領域の振動を発生させる振動体2と、この振動体2に接合され振動体2の振動に伴って振動する駆動チップ3と、振動体2を収納するケース4と、を備えている。このケース4はアルミ合金等の金属材料で構成されており、バネ等の弾性支持体34を介して振動体2を支持している。ケース4の内面には、金属材料よりも放射熱の吸収率が高いセラミックで構成された薄膜状又はシート状の吸熱部材Hが被覆されている。
(もっと読む)
超音波モータ制御装置、および超音波モータ制御方法
【課題】停止位置の精度を向上させ得る超音波モータ制御装置を提供する。
【解決手段】移動体を移動制御する超音波モータ3を駆動するコントローラ10において、前記移動体の移動状態を検出する変位センサ5と、その変位センサ5で検出した検出位置Ldと目標位置L*との偏差ΔLdを演算する偏差演算手段(ステップS4)と、その偏差演算手段で演算した偏差を積分演算する積分演算手段(ステップS12)と、少なくとも前記積分演算手段から出力される積分出力に基づいて超音波モータ3を駆動するアンプ4とを備え、前記積分演算手段は、前記偏差演算手段で演算した偏差ΔLdが減少傾向にあるときに、減少度合いに応じて積分定数kiを少なくとも3段階に変化させる積分定数設定手段(ステップS5〜S9)を有する。
(もっと読む)
圧電アクチュエータの駆動方法、圧電アクチュエータの駆動装置、電子機器、圧電アクチュエータの駆動装置の制御プログラム及び記憶媒体
【課題】 複数の圧電アクチュエータの駆動時に消費電流過多によるシステムダウンを回避でき、回路構成の複雑・大型化を防止できる圧電アクチュエータの駆動方法の提供。
【課題手段】 複数の圧電アクチュエータを駆動する圧電アクチュエータの駆動方法であって、前記各圧電アクチュエータは、所定の周波数の駆動信号201,202が圧電素子に与えられることで振動する振動体を備える。各圧電素子へ供給する駆動信号201,20の周波数を所定範囲でスイープさせるとともに、圧電素子へ供給する駆動信号201,20のスイープ開始タイミングをΔTだけずらして制御することで、各圧電素子の消費電流が最大となるタイミングをずらす。これにより、各圧電アクチュエータの合計消費電流210のピーク値を抑えることができ、電流過多によるシステムダウンを回避できる。
(もっと読む)
超音波駆動装置
【課題】 振動子の駆動力を確実に被駆動体に伝達することができ、その駆動性能を向上することができる超音波駆動装置を提供する。
【解決手段】 電力が供給されることにより振動を発生する複数の振動子3と、各振動子3に固定される保持部材17と、各振動子3を所定方向に向けて付勢する付勢部材と、各振動子3に固定した保持部材17を支持する支持部材5と、を有し支持部材5に、保持部材17が固定された振動子3をそれぞれ収容し、所定方向に移動可能に支持する複数の配置孔11が形成されていることを特徴とする。
(もっと読む)
積層型圧電素子
【課題】 リード線による電極同士の接続を不要にすると共に、外部との接続を一側の面だけで行うことができる積層型圧電素子を提供する。
【解決手段】 積層型圧電素子の積層体2は、圧電体7〜10で形成されている。圧電体8は、2行2列に配列された内部電極部12A〜12Dを有し、対角の内部電極部12B,12C同士は接続されている。圧電体9は、2行2列に配列された内部電極部15A〜15Dを有し、対角の内部電極部15A,15D同士は接続されている。圧電体10は内部電極部18を有している。積層体2の一側面には、電極部12A,15Aと接続された側面電極と、電極部12B,15Bと接続された側面電極と、電極部18と接続された側面電極とが設けられ、積層体2の他側面には、電極部12C,15Cと接続された側面電極と、電極部12D,15Dと接続された側面電極とが設けられている。
(もっと読む)
超音波モータ
【課題】超音波モーターの駆動機構部内の塵を単純な機構により確実に排除することことが可能な超音波モータを提供する。
【解決手段】超音波モータ40は、例えば、レンズ鏡筒1の駆動源として適用され、振動子41と、振動子支持部と、振動子41によって駆動される駆動レール16とを有してなり、振動子41は、積層圧電体42と、支持軸43と、駆動レール16に押圧接触し、楕円振動が励起される一対の駆動子44と、一対の突起部材15と、接続用フレキシブル基板等を有している。突起部材15は、移動方向に延出する先端凹状円弧部15fを有し、振動子両端に固着して配され、駆動状態では、凹状円弧部15fが駆動レール16の表面に接触して摺動することから駆動子44の摩擦により生じた駆動レール16上の摩耗粉が凹状円弧部15fによって確実に除去される。
(もっと読む)
超音波モータ
【課題】モータの形状を大きくすることなく、棒状超音波モータの構造に直接、位置検出器(エンコーダ)および、スケールを組み込む。
【解決手段】棒状振動子を固定する支持部材に、移動体(ロータ)の移動量を検出するための移動量検出手段を備え、また回転出力部材にスケールを一体的に備えさせる。
(もっと読む)
超音波モータ
【課題】振動子をロータに対して良好な状態で摩擦接触させることができる変換効率のよい超音波モータを提供すること。
【解決手段】この超音波モータは、ハウジング2と、振動子35によって回転駆動されるロータ3と、ベアリング部材8と、アクチュエータとして支持軸と駆動子を有する振動子35と、押圧用凸部,両端部に丸穴および長穴をもつ板バネ18とを有してなり、振動子35は、ハウジング2の開口部2aに摺動可能で挿入され、さらに、板バネ18の付勢力を受け、上記駆動子をロータ3に当接した状態に保持される。板バネ18による振動子の押圧力は、板バネ18の下部に挿入される調節ワッシャ21によって調節される。板バネ18は、押圧状態で長穴部がスライドして変形するので、板バネ18の凸部は、平行移動状態で変位するので振動子に対して片当たりすることなく、振動子を押圧し、良好な駆動状態が得られる。
(もっと読む)
多自由度駆動機構
【課題】複数配置した、超音波モータ相互の力を合わせることで高出力な回転運動が可能な多自由度駆動機構の提供。
【解決手段】多自由度超音波モータαの固定子11上端と回転子12とを回転自在に圧接したものを複数台配置し、それぞれの回転子12の頭頂部に立設した回転子シャフト13と、それらの回転子シャフト13に取り付けられた伸縮自在のスライド機構14を具備することにより、多自由度超音波モータαが回転自在に傾き、その傾きに応じて回転子シャフト13の長さを調節し、多自由度駆動機構が傾斜方向及び横方向に回転するよう構成される特徴的構成手段の採用。
(もっと読む)
超音波モータの制御装置
【課題】 従来のコイルを超音波モータの前段にコイルを入れ、駆動パルスをコイルにより昇圧した駆動波形を超音波モータの電極へ印加する駆動回路は、非常に簡素で低コストで実現できる駆動回路であったが、低速駆動時に駆動電流が大きくなるという問題があった。
【解決手段】 駆動電流を検知しながら、駆動電流が最も小さくなる駆動周波数を探し出し、その周波数に駆動周波数を固定して制御することにより、超音波モータ駆動装置の省電力駆動を実現する。
(もっと読む)
アクチュエータの駆動装置、アクチュエータを用いた機器および画像形成装置
【課題】 簡単な構成で速度及び位置の定常誤差を共にゼロにすることができるアクチュエータの駆動装置を提供する。
【解決手段】 アクチュエータの駆動状態を検出する検出手段7と、検出手段から得られた駆動状態と所定の状態との差を演算する演算手段1と、演算手段から得られた値を積分する第1の積分手段2と、第1の積分手段から得られた値を積分する第2の積分手段3と、第1の積分手段から出力される値と第2の積分手段から出力される値とを加算する加算手段37とを有し、加算手段から出力される値に応じてアクチュエータに供給するエネルギー量を調定する。
(もっと読む)
超音波モーターの特性測定装置
【課題】 電界および磁界のカップリングノイズを遮断して正確な特性値を測定する。
【解決手段】 電圧検出回路10aは、電磁シールド板14により覆ったアッテネーター12により超音波モーター1の駆動電圧を分圧して検出し、電流検出回路10bは、一次巻き線に流れる電流により発生する磁界を電気的に絶縁された二次巻き線により検出するCT16を備えるとともに、CT16の一次巻き線に電界を遮断して磁界を透過するシールド線15を用い、CT16の一次巻き線に駆動装置2から超音波モーター1に流れる駆動電流を通電する。
(もっと読む)
ステージのドリフト制御装置
【課題】超音波モータによってステージを一次元方向に動かす場合に、ステージ停止後のステージのドリフトを抑える。
【解決手段】1次元方向に動くステージ2に接触可能な接触部材3又はそれに連結された基材9aを一つの電極として、前記一次元方向の前又は後の位置に他の固定電極13,14を対向させて2つのコンデンサを形成し、前記2つのコンデンサに交流電圧を印加して、当該コンデンサの静電容量の変化に基づく信号を取り出し、この変化信号に基づいて、所定の停止位置にステージ2を停止させるように制御する。
(もっと読む)
21 - 40 / 40
[ Back to top ]