
Fターム[5H680CC07]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 原理、現象 (1,634) | 振動波形 (500) | 進行波 (242)
Fターム[5H680CC07]の下位に属するFターム
表面波、レイリー波 (18)
Fターム[5H680CC07]に分類される特許
41 - 60 / 224
アクチュエータ
【課題】 小型で移動軸を前進と後進させることができ、移動軸の前進と後進の移動限界を高精度に決めることができるアクチュエータを提供する。
【解決手段】 振動駆動部材10は、筒状の振動体11を有し、振動体11の4つの側面に駆動素子15a〜15dが設けられ、振動体11の振動の節が支持部18で支持されている。振動体11が屈曲変形し、その屈曲方向が回転方向へ変化すると、振動体11の雌ねじ部に嵌合している移動軸20がX1−X2方向へ移動する。移動軸20には4個の当接突起31a〜31dが設けられ、固定側では、前進ストッパ33a,33bと後進ストッパ35a,35bが設けられている。いずれかの当接突起とストッパとが回転方向で当たることで、移動軸20の前進限界位置と後進限界位置が決められる。
(もっと読む)
駆動装置

【課題】厚み方向の小型化を実現する駆動装置を提供することを課題とする。
【解決手段】駆動装置50は、第1枠体51と、第2枠体52と、第3枠体53と、第1駆動機構54と、第2駆動機構55とを備えている。第2駆動機構55において駆動発生部21が駆動受部22に作用する方向は、第2方向Bと垂直である。第1駆動機構54の駆動受部22は、第1方向Aに延び第1駆動機構54の駆動発生部21により第1方向Aに駆動されるシャフト5を有している。第2駆動機構55の駆動受部22は、第2方向Bに延び第2駆動機構55の駆動発生部21により第2方向Bに駆動されるシャフト5を有している。第1駆動機構54のシャフト5は、第2駆動機構55のシャフト5と同一平面上に配置されている。
(もっと読む)
振動アクチュエータ駆動装置、レンズ鏡筒、及びカメラ
【課題】振動アクチュエータの駆動制御に用いられるパラメータを用いずに、当該振動アクチュエータの異常を検出する振動アクチュエータ駆動装置を提供する。
【解決手段】振動アクチュエータ駆動装置(10)は、設定された駆動速度に応じた駆動信号を振動アクチュエータ(11)に印加する振動体励振部(17)と、前記振動アクチュエータが駆動する速度を測定する速度検出部(12)と、前記速度検出部(12)が測定した速度と、前記駆動速度との速度差に応じて、前記振動アクチュエータ(11)に異常が発生している確率を算出する異常発生確率算出部(132)と、前記異常発生確率算出部(132)が算出した確率が予め定めた異常判定値を超えた場合、前記振動体励振部(17)に前記駆動信号の印加を停止させる駆動制御部(131)とを備える。
(もっと読む)
振動アクチュエータ、レンズ鏡筒及びカメラ
【課題】簡単な構造で温度上昇を低減可能な振動アクチュエータを提供する。
【解決手段】本発明の振動アクチュエータは、電気機械変換素子(12)の励振により振動波を生じる振動子(11)と、前記振動子(11)に加圧接触されて前記振動波によって駆動され、前記振動子(11)に対して相対移動する移動子(15)と、前記移動子(15)の相対移動に連動して送風を行う送風手段(30)と、を備えること、を特徴とする。
(もっと読む)
超音波モータ
【課題】単一の部材からなり、構造が単純であり、溝部等が不要であり、縦振動とねじれ振動を容易に励起することができ、縦振動とねじれ振動を合成することにより楕円振動を形成し、楕円振動によりロータを回転させる超音波モータを提供する。
【解決手段】振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ2次共振振動又はねじれ3次共振振動とを合成することにより、楕円振動を形成してなり、振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ2次共振振動又はねじれ3次共振振動と、の共振周波数がほぼ一致するように、振動子の矩形状の長さ比率を設定し、振動子は、複数の圧電シートからなり、圧電シートの厚み方向に分極されてなる活性化領域により、縦1次共振振動と、ねじれ2次共振振動又はねじれ3次共振振動と、を発生する。
(もっと読む)
振動型アクチュエータ
【課題】振動型アクチュエータ作動時の騒音を抑制する。
【解決手段】超音波アクチュエータ2は、アクチュエータ本体4と、アクチュエータ本体4に設けられて駆動力を出力する駆動子3とを備えている。超音波アクチュエータ2は、アクチュエータ本体4に設けられて主面40a,40bに交差する方向の両側へ突出するホルダ5と、ホルダ5をそれぞれ支持する2つの支持体6,6と、アクチュエータ本体4の主面40a,40bに接触することによってアクチュエータ本体4の変位を制限する接触ゴム66a,66b,66cとをさらに備えている。アクチュエータ本体4は、移動体11側へ付勢されている。支持体6,6には、ホルダ5が嵌ると共にアクチュエータ本体4の付勢方向に延びる長孔64が形成されている。接触ゴム66a,66b,66cは、アクチュエータ本体4の各主面40a,40bにおいて長手方向の異なる位置に少なくとも2つ設けられている。
(もっと読む)
超音波モータ
【課題】セルフセンシング方式の超音波モータにおいて低コスト化および小型化を図る。
【解決手段】駆動信号に応答して圧電素子が高周波振動を行う振動体12に移動体13が加圧接触して回転し、それらの接触部に溝等の振動状態を変化させる部分を周期的に形成し、その部分の通過による振動状態の変化を検出回路31が検出することでセンサレスを実現する超音波モータ1において、信号変換器32が検出電極の検出電圧の駆動信号に対する位相の変化から前記部分の通過に伴う脈動波形を生成し、その脈動波形から帯域フィルタ33が脈動成分を抽出し、カウンタ35がカウントすることで、回転位置と回転速度との少なくとも一方の検出を可能にする。そして、帯域フィルタ33の遮断周波数を、周波数設定器36が駆動信号の周波数に応じて変化することで、加圧力のムラにより脈動成分に1回転毎に周期的に現れる交流成分を除去する。こうして、組立て精度を緩和する。
(もっと読む)
振動波アクチュエータ、レンズ鏡筒及びカメラ
【課題】圧電体と弾性体との間の良好な接合が確保された振動波アクチュエータ、レンズ鏡筒及びカメラを提供する。
【解決手段】本発明の振動波アクチュエータ10は、圧電体13と、該圧電体13の振動により振動波が生じる弾性体12とを備え、前記圧電体13は前記弾性体12よりも薄く、前記弾性体12と前記圧電体13とは超音波接合により接合されていること、を特徴とする。
(もっと読む)
振動アクチュエータ及び電子機器
【課題】好適な特性を有する振動アクチュエータ及び電子機器を提供する。
【解決手段】本発明の振動アクチュエータ10は、相対移動部(13)と接触し、前記相対移動部(13)の相対移動に必要な振動をする振動部(12)と、前記相対移動部(13)を前記振動部(12)との間に挟むように備えられ、前記振動部(12)に対する前記相対移動部(13)の移動に応じて前記振動部(12)に対して相対的に移動する第1部材(22)と、転動部材(23)を介して前記第1部材(22)と対向し、前記第1部材(22)が前記振動部(12)に対して相対的に移動可能なように前記第1部材(22)を支持する第2部材(21)と、前記振動部(12)と前記相対移動部(13)とが接触するように、前記第2部材(21)と前記振動部(12)との間に加圧力を生じさせる加圧部材(15)とを含み、前記第1部材(22)は、可塑性物質を含有することを特徴とする。
(もっと読む)
駆動装置、レンズ鏡筒及びカメラ
【課題】相対駆動される部材間の接触面への悪影響を防止できる駆動装置を提供する。
【解決手段】第1部材(3)を駆動する圧電素子と、第1部材が駆動されることにより回転駆動される第2部材(4)と、第2部材の回転軸に沿って設けられ、第2部材を回転可能に支持する支持軸(5)とを備え、第2部材は、支持軸に回転可能に支持されるための軸受部(4e)を有することを特徴とする。
(もっと読む)
駆動装置、レンズ鏡筒及びカメラ
【課題】異なる2方向の振動をそれぞれ独立した振動として取り出すことができる駆動装置とそれを用いたレンズ鏡筒を提供する。
【解決手段】第1部分と第2部分(3)とを相対駆動させる駆動装置において、第2部分を駆動させる圧電素子(6)と、圧電素子を介して第2部分を駆動可能に支持するベース部(2)と、圧電素子の駆動電圧が印加される電極部(6a)と、を備え、電極部は、ベース部から露出された露出部(6b)を有することを特徴とする。
(もっと読む)
圧電アクチュエータ、レンズ鏡筒及びカメラ
【課題】駆動力や駆動効率が向上された圧電アクチュエータを提供する。
【解決手段】本発明の圧電アクチュエータは、第1の方向に変位可能な第1圧電素子21、及び第1の方向と交差する第2の方向に変位可能な第2圧電素子22を有し、複数のグループに分けられた複数の圧電部材20と、前記圧電部材20と接触する接触面12Aを有し、前記圧電部材に対して第1の方向に相対移動する相対移動部材12と、複数のグループのうちの1つのグループの圧電部材20Aが接触面に接触している状態のときに、その圧電部材20Aの第1圧電素子を駆動することにより相対移動部材を第1の方向に相対移動させ、圧電部材20Aの第1圧電素子を駆動する際に、他のグループの圧電部材20Bの第2圧電素子を駆動することにより、他のグループの圧電部材を接触面から離間させた状態とする駆動部30と、を備える。
(もっと読む)
回転型振動波駆動装置
【課題】接触部材の局所的な摩耗を低減し、長期の駆動による性能劣化を低減することが可能となる回転型振動波駆動装置を提供する。
【解決手段】電気−機械エネルギー変換素子と、前記電気−機械エネルギー変換素子に固定され、前記電気−機械エネルギー変換素子に電圧を印加することにより振動する振動体と、前記振動体に接触し、前記振動により摩擦駆動する移動体と、を有する回転型振動波駆動装置であって、
前記移動体は、該移動体の本体部から延出した支持部と、前記支持部から延出し前記振動体に摩擦接触する接触部と、を備え、前記支持部と前記接触部とが、前記移動体の回転軸方向に夫々弾性変形可能に構成されている。
(もっと読む)
振動波駆動装置用振動体、及び振動波駆動装置用振動体の製造方法
【課題】耐久性の高い振動波駆動装置を実現できる振動体の製造方法、及び振動体を提供する。
【解決手段】複数の突起部1aを有する振動体1に電気−機械エネルギー変換素子6を接合した振動子を用いる振動波駆動装置の振動体の製造方法は、第1の工程と第2の工程を有する。第1の工程では、複数の突起部1aを有する弾性体素材1を製造する。第2の工程では、弾性体素材1の突起部1aの突出方向と対向する方向の圧力を加えて突起部1aの少なくとも一部を押しつぶし、互いに隣り合う突起部間の隙間1cを減じる。
(もっと読む)
振動アクチュエータ、レンズ鏡筒、カメラ及び振動アクチュエータの製造方法
【課題】振動体の表面に形成された膜のラッピング時における過度な研削が防止される振動アクチュエータ及びその製造方法を提供する。
【解決手段】本発明の振動アクチュエータ(10)は、振動波を生じる振動体(11)と、前記振動体(11)と加圧接触することにより前記振動波によって駆動される相対移動部材(15)と、を備える振動アクチュエータ(10)であって、前記振動体(11)の前記相対移動部材(15)側の面(30)は、表面に膜(31)が形成され、前記膜(31)を介して前記相対移動部材(15)と接触する接触部(32)と、前記接触部(32)よりも前記相対移動部材(15)側へ突き出した突出部(34)が設けられ、前記相対移動部材(15)と接触しない非接触部(33)と、を備えること、を特徴とする。
(もっと読む)
振動アクチュエータ、レンズ鏡筒及びカメラ
【課題】限定されたスペースにも配置可能で且つ駆動性能の良好な振動アクチュエータ、それを備えるレンズ鏡筒及びカメラを提供する。
【解決手段】本発明の振動アクチュエータ10は、電気機械変換素子13に接触して設けられ、前記電気機械変換素子13の駆動により振動波を生じる弾性体12と、前記弾性体12と加圧接触し、前記振動波によって前記弾性体12に対して相対移動される相対移動部材15と、を備える振動アクチュエータ10であって、前記弾性体12の前記相対移動部材15側は、櫛歯状となるように複数の溝30が形成され、前記相対移動部材15の相対移動方向θと交差する方向における前記溝30の深さは、前記相対移動部材15の相対移動方向θに沿って異なっていること、を特徴とする。
(もっと読む)
超音波モータ
【課題】複数の超音波振動子を備えた超音波モータであって、前記複数の超音波振動子を同時駆動する際の駆動安定性及び駆動自由度を向上させた超音波モータを提供すること。
【解決手段】超音波モータを次のように構成する。すなわち、複数の圧電素子2と、圧電素子2の一方面に設けられた少なくとも一つ以上の駆動子4と、圧電素子2の他方面において縦振動及び屈曲振動の共通の節または節近傍に対応する位置に配設されたホルダ部材10と、ホルダ部材10と係合することで被接触部材13と駆動子4との接触面に対して平行を為す方向における圧電素子2の位置を規制する位置規制部材6と、位置規制部材6に設けられ、ホルダ部材10と係合することで圧電素子2を保持する振動子保持部材16と、圧電素子2の個数と同数の位置規制部材6が設けられたベース部材8と、駆動子4により任意の方向へ摩擦駆動される被接触部材13と、を具備する超音波モータ。
(もっと読む)
振動アクチュエータ、それを備えたレンズ鏡筒及びカメラ
【課題】小型化可能で、安価で且つ良好な駆動性能を有する振動アクチュエータ及びそれを備えたレンズ鏡筒、カメラを提供する。
【解決手段】本発明の振動アクチュエータ(10)は、振動波を生じる振動部材(11)と、前記振動部材と接触する接触面(30a)を有し、前記振動波により前記接触面(30a)が駆動されることにより前記振動部材に対して相対移動する相対移動部材(40)と、を備える振動アクチュエータであって、前記相対移動部材(40)は、前記接触面(30a)を含む第1の部分(30)と、前記第1の部分(30)よりも剛性が高く、かつ、前記接触面(30a)と交差する第1の面(41a)を有し、前記第1の部分(30)の少なくとも一部が前記第1の面(41a)と接触するように前記第1の部分(30)が取り付けられた第2の部分(40)とを備えたこと、を特徴とする。
(もっと読む)
振動波モータの駆動方法及び駆動装置
【課題】振動波モータの実際の回転速度と目標回転速度の回転速度差に応じて、振動波モータに供給する交流電圧の周波数を適切に制御する振動波モータの駆動方法を提供する。
【解決手段】交流電圧により振動体401に振動を発生させて移動体403を駆動する振動波モータ101を、移動体403の目標回転速度Nobjnを設定し、交流電圧の周波数更新量Δfnに対する移動体403の回転速度の増減量ΔNnの割合Tnを求め、目標回転速度Nobjnと移動体403の実際の回転速度Nnとの回転速度差Nobjn−Nnを求め、回転速度差Nobjn−Nnを割合Tnで除することにより周波数更新量Δfnを求め、周波数更新量Δfnを用いて交流電圧の周波数fnを更新する処理を行うことにより、駆動制御する。
(もっと読む)
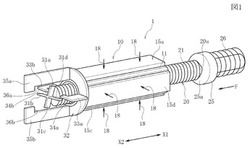
アクチュエータ
【課題】小型でも高速、高耐久、高出力である直動型のアクチュエータを実現する。
【解決手段】中間部と端部で直径の異なる円筒状の振動体2と同軸に、2つの円筒状の圧電素子3a、3bを配置し、振動体2の両端部に圧電素子3a,3bを固定する。圧電素子3a、3bの内側に配置した電極4a、4bにそれぞれ振動電圧をかけて振動体2を加振し、進行波の波頭を、振動体2を嵌合させた筒状部材1に接触させる。振動体2の接触部における摩擦によって、振動体2と圧電素子3a、3bからなる移動体を筒状部材1の軸方向へ移動させる。
(もっと読む)
41 - 60 / 224
[ Back to top ]