
Fターム[5H680CC07]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 原理、現象 (1,634) | 振動波形 (500) | 進行波 (242)
Fターム[5H680CC07]の下位に属するFターム
表面波、レイリー波 (18)
Fターム[5H680CC07]に分類される特許
61 - 80 / 224
微小構造物の製造方法、微小構造物集合体、微小構造物、改質器、マイクロプラズマ発生装置、ガス検知用センシングデバイス、アクチュエータ及び圧力センシングデバイス
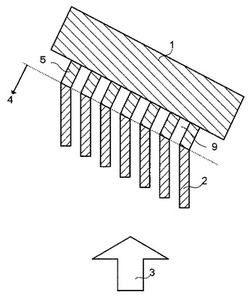
【課題】所望形状の均質な微小構造体を形成することのできる微小構造物の製造方法等を提供する。
【解決手段】表面に複数の凸部5を有する基材1を、凸部5の先端部によって形成される基材1表面の凸部の向き4が蒸着粒子3の入射方向に対して対向する方向より偏向して基材1を設置して蒸着材料を成長させる。これにより、凸部5の先端部から蒸着材料の構造体を成長させて個々の構造体がギャップによって隔てられ物理的に独立した微小構造物2の集合体を形成する。
(もっと読む)
超音波モータ

【課題】圧電体を設ける領域を有効に使用して、効率よく駆動する超音波モータを得る。
【解決手段】第3のA電極33pは、径方向における幅が33.75°であって、第4のA電極34pと第2のB電極32mとの間に設けられる。径方向において第4のA電極34pの一部と11.25°に渡り重なりあう。第3のB電極33mは、径方向における幅が33.75°であって、第4のA電極34pと第2のB電極32mとの間に設けられる。径方向において第2のB電極32mの一部と11.25°に渡り重なりあう。第3のA電極33pの一部と第3のB電極33mの一部は、径方向において22.5°に渡り重なり合う。これは、交流電源の波長、つまり弾性部材の超音波振動による波長の1/4の長さである。第3のA電極33pと第3のB電極33mとの境界は、第3のA電極33pの面積と第3のB電極33mの面積とが略同じになるような位置に設けられる。
(もっと読む)
可逆圧電ロータリーモータに基づくバルブ
栓を備えたバルブ本体と、そのバルブ本体と連結して、回転軸の周囲にその回転可能な栓を回転させる様に作動する駆動部本体を備えた圧電バルブが提供される。その回転軸に沿って配置され、前記栓と静的に連結すると共に、前記駆動部本体と回転可能に連結するシャフトを前記駆動部本体は備える。前記軸の周囲に配置され、前記駆動部本体に回転可能に連結するロータアセンブリもまた前記駆動部本体は備える。前記軸の周囲に配置されて前記駆動部本体に静的に連結しており、前記ロータアセンブリの内表面に摩擦係合する様に構成された第1の圧電アクチュエータを前記駆動部本体はさらに備える。加えて、前記軸の周囲に配置されて前記シャフトに静的に連結しており、前記ロータアセンブリの内表面に摩擦係合する様に構成された第2の圧電アクチュエータを前記駆動部本体はさらに備える。 (もっと読む)
アクチュエータ駆動装置、レンズ鏡筒および撮像装置
【課題】回路規模を大きなものとすることなく、電源の電圧が変動した場合においても、アクチュエータの駆動を適切に制御することができるアクチュエータ駆動装置を提供すること。
【解決手段】アクチュエータを駆動させるための電源からの電圧を検出する電圧検出手段と、前記アクチュエータに駆動信号を出力する駆動信号出力手段と、前記電源からの電圧及び前記駆動信号と、前記アクチュエータの駆動速度との関係を示す情報を記憶する記憶手段と、を備え、前記駆動信号出力手段は、前記電圧検出手段で検出された前記電源からの電圧に応じて、前記記憶手段に記憶された前記情報に基づいて求めた駆動信号を出力することを特徴とするアクチュエータ駆動装置。
(もっと読む)
超音波モータ
【課題】低速駆動を行う場合であっても、不感帯の影響を小さくして良好な制御性且つ高い速度分解能で駆動可能な超音波モータを提供すること。
【解決手段】駆動位相差と駆動速度と特性直線上の駆動点を切り替えて駆動速度を制御する制御CPU22を、超音波モータに具備させる。この制御CPU22は、駆動速度を減少させる場合、駆動周波数の値を変化させずに駆動位相差を増加させ、該駆動点で所定時間だけ駆動した後、駆動位相差を変化させずに駆動周波数の値を前記振動子の共振周波数により近付ける値に切り替える制御を、所望の駆動速度に達するまで繰り返し実行し、駆動速度を増加させる場合、駆動周波数の値を変化させずに駆動位相差を減少させ、該駆動点で所定時間だけ駆動した後、駆動位相差を変化させずに駆動周波数の値を前記振動子の共振周波数からより遠ざける値に切り替える制御を、所望の駆動速度に達するまで繰り返し実行する。
(もっと読む)
ミアンダ形振動子およびこれを用いた光学反射素子
【課題】本発明はミアンダ形振動子の駆動効率を向上させることを目的とする。
【解決手段】この目的を達成するため本発明は、複数の振動板11上には、それぞれドライブ素子15が設けられ、これらのドライブ素子15は、振動板11の一方の端部側であって、隣接する振動板11上に設けられたドライブ素子15とは反対の端部側に片寄って配置されたものとした。これにより本発明は、ミアンダ形振動子全体としてはつづら折り状となるように駆動し、従来と比べてエネルギーロスの少ない自然な動作モードとなる。そしてその結果、高い駆動効率を実現できる。
(もっと読む)
振動波モータ用の負荷トルク変動装置及び画像形成装置
【課題】 ロータに設けられる回転部材に機構的な特徴を加えてロータ及びステータに同じ接触状態が続くことを回避することで偏磨耗を抑制し、振動波モータの長寿命化を実現する。
【解決手段】 振動波モータMで回転するシャフト405に設けられ、シャフト405に掛かる負荷トルクの大きさをシャフト405の回転位相で変動させる偏心カム1302、アーム1303、付勢バネ1402と、シャフト405に掛かる負荷トルクの周期をシャフト405の回転周期に対して変動させるワンウェイクラッチ1301と、を備える振動波モータ用の負荷トルク変動装置500を構成した。
(もっと読む)
超音波モータ
【課題】駆動位相差を変化させることによる速度制御を行う場合であっても、精度の良好な周波数追尾を行うことが可能な超音波モータを提供すること。
【解決手段】第1の駆動信号及び第2の駆動信号を超音波振動子4に印加して当該超音波振動子4に楕円振動を発生させ、該楕円振動から駆動力を得て被駆動体5を摩擦駆動する超音波モータに、次のような制御を行う制御CPU22を具備させる。前記制御CPU22は、前記第1の駆動信号及び前記第2の駆動信号を生成し、前記振動子の振動状態を検出して振動検出信号を生成し、前記第1の駆動信号と前記第2の駆動信号との合成波と、前記振動検出信号と、の位相差が所定の範囲内になるように前記駆動信号生成部を制御する。
(もっと読む)
振動波駆動装置
【課題】被駆動体と振動子との接触部に介在する水分を除去し、摩擦力を所定の摩擦力に回復することによって、所定の速度で駆動させることが可能となる振動波駆動装置を提供する。
【解決手段】電気−機械エネルギー変換素子を有する振動子と、該振動子に設けられた駆動部に対して離散的に加圧接触する被駆動体と、前記素子に駆動信号を与える第1の駆動信号付与手段と、を備え、
前記駆動信号付与手段により前記素子に駆動信号を与えて前記振動子の駆動部に楕円運動を生じさせ、該駆動部と加圧接触する前記被駆動体を前記振動子に対して相対移動させる振動波駆動装置であって、
前記第1の駆動信号付与手段とは別の第2の駆動信号付与手段を備え、
前記第2の駆動信号付与手段によって、前記素子に周期的動作を行う駆動信号を与え、前記駆動部と前記被駆動体との接触部に介在する水分を除去するように構成される。
(もっと読む)
振動アクチュエータ、レンズ鏡筒、およびカメラ
【課題】安価なコストで、良好な駆動性能を達成可能な振動アクチュエータを提供する。
【解決手段】本発明の振動アクチュエータ(10)は、電気エネルギーを機械エネルギーに変換する電気機械変換素子により振動波を生じる振動体(11)と、前記振動体(11)と加圧接触する接触面(32a)を有し、前記振動波によって前記接触面(32a)が駆動されることにより前記振動体(11)に対して相対移動する相対移動部材(15)と、を備える振動アクチュエータ(10)であって、前記相対移動部材(15)は、樹脂で形成された第1の部材(31)及び前記第1の部材(31)より剛性の高い第2の部材(30)を含み、前記接触面(32a)と前記接触面(32a)以外の少なくとも1面とを含む部分が、前記第1の部材(31)で形成されていること、を特徴とする。
(もっと読む)
超音波モータ及びそれを備えた搬送装置
【課題】簡単な構成を有しながらも高いトルク効率を得ることのできる超音波モータ及びそれを備えた搬送装置を提供する。
【解決手段】超音波モータ1は、一面を有する固定部材30と、固定部材の一面に対向するように配置された移動部材20と、移動部材の少なくとも一部を固定部材の一面に接触させると共に、移動部材を固定部材に対して移動させるアクチュエータ27とを備える。
(もっと読む)
振動体及びその製造方法とそれを備えた超音波モータ
【課題】本発明は、製造が容易で簡単であるだけでなく信頼性のある電極接続部を有する超音波モータの振動体を提供する。
【解決手段】超音波モータの振動体20は、振動部材20aと、電圧を印加したときに進行波を生成し、振動部材を振動させる圧電体21と、を含み、圧電体21は、正極と負極が交互に分極され、振動部材20aに取り付けられた第1圧電層22と、正極と負極が交互に分極され、第1圧電層に取り付けられた第2圧電層23と、第1及び第2圧電層の第1面と第1面の反対面である第2面とに形成された複数の電極を備える電極部40と、第1及び第2圧電層の外周面に形成され、複数の電極を相互に選択的に接続する電極接続部60と、を含むことを特徴とする。
(もっと読む)
駆動装置及びその制御方法、並びに電子機器
【課題】停止時の振動波モータの消費電力を削減し、更に、ギアの歯飛びや歯面の欠けの発生を防止することができる駆動装置を提供する。
【解決手段】パンチルトカメラ100は、カメラ部102、パンユニット115、振動波モータ103、110、エンコーダセンサ106、113、エンコーダスケール107、114を備える。振動波モータ103、110は、圧電素子7、振動子2、スライダ部材3、ロータ4、シャフト10を備える。振動波モータ103の停止直後に使用者が手動でカメラ部102或いはパンユニット115を回転させた場合、エンコーダセンサ106(113)でエンコーダパルスが検出される。制御部20は、電圧制御発振器23から定在波に対応したパルス信号を発生させ、駆動パルス発生器24を介してドライバA25、ドライバB26に供給する。しかし、振動波モータ103を停止してから所定時間経過後はエンコーダセンサ106(113)による検出を中止する。
(もっと読む)
振動型モータの駆動制御装置
【課題】モータ起動時から加速初期の速度追従性を向上させることができる振動型モータの駆動制御装置を提供する。
【解決手段】CPU301は、振動型モータ310を目標速度にするための速度指令値を、関数演算値に基づき逐次変化させて生成する速度指令値生成部401と、振動型モータ310の実速度を検出する速度検出部403とを備える。また、速度指令値生成部401で生成される速度指令値と速度検出部403で検出される実速度とを逐次比較し、両者の差分に対し比例、積分演算を行う比較演算部402を備える。
(もっと読む)
振動波モータ
【課題】突起の中で径方向の滑りを低減したい位置の振動の軌跡方向を、移動体の変位方向と略一致させ、摺動損失を低減することができる振動波モータを提供する。
【解決手段】振動波モータは、電気エネルギーを機械エネルギーに変換する変換素子(圧電素子1)に交流電圧を印加することによって、変換素子が結合される振動体2に進行性振動波を発生させ、進行性振動波により振動体2に接触する移動体3を摩擦駆動する。そして、振動体2は、変換素子が結合される基部2aと、基部2aに設けられ、移動体3と接触する接触面を有する突起2bとを備える。また、基部2aの移動体3との接触面側に設けられるとともに、突起2bと接続される支持部2cを備える。支持部2cは、振動体2の中心軸と突起2bの周方向の中心とから定められる面に対して、非対称の位置に形成されている。
(もっと読む)
多数の圧電アクチュエータを使用するアクチュエータシステム
【課題】摩擦を比較的低レベルとし剛性を比較的高レベルとしつつ光学デバイスの1つまたは複数の光学素子を高精度かつ高信頼性に位置決めするシステムを提供する。
【解決手段】位置決めシステムは、可変ズームレンズシステム等の光学デバイス内の光学素子の位置を調整する。フレームが光学素子を支持し、細長支持構造の細長表面がそのフレームを支持する。フレームは細長支持構造に係合する圧電アクチュエータも支持する。制御部は圧電アクチュエータを駆動する制御信号を供給する。駆動されたアクチュエータモジュールの圧電素子は、細長支持構造の細長表面に第1及び第2の力を組み合わせて作用させ、細長表面に対しフレームを位置決めする。圧電素子により与えられた力の組合せによって、細長支持構造に対し圧電アクチュエータが前進する。
(もっと読む)
超音波モータの駆動方法及び駆動装置
【課題】共振周波数の異なる複数の超音波モータを単独駆動及び同時駆動させるための駆動方法及び駆動装置を提供する。
【解決手段】共振周波数の異なる超音波モータA10と超音波モータB20が、駆動装置100の出力に接続される。駆動装置100は、超音波モータA10を単独駆動させる際には「超音波モータA10の駆動可能な周波数の範囲内、且つ超音波モータB20の駆動可能な周波数の範囲外」の周波数を出力し、超音波モータA10と超音波モータB20を同時駆動させる際には「超音波モータA10の駆動可能な周波数の範囲内、且つ超音波モータB20の駆動可能な周波数の範囲内」の周波数を出力し、超音波モータB20を単独駆動させる際には「超音波モータA10の駆動可能な周波数の範囲外、且つ超音波モータB20の駆動可能な周波数の範囲内」の周波数を出力する。
(もっと読む)
振動アクチュエータ、振動アクチュエータの製造方法、レンズ鏡筒及びカメラ
【課題】駆動性能が良好な振動アクチュエータ、振動アクチュエータの製造方法、レンズ鏡筒及びカメラを提供する。
【解決手段】振動アクチュエータ(10)は、電気エネルギーを機械エネルギーに変換する電気機械変換素子(13)と、電気機械変換素子(13)の励振によって振動波を生じる弾性体(12)と、導電性を有する熱可塑性樹脂により形成され、電気機械変換素子(13)と弾性体(12)とを接合する樹脂層(24)と、弾性体(12)と加圧接触され、振動波によって弾性体(12)に対して相対移動する相対移動部材(15)とを備えるものとした。
(もっと読む)
振動型モータ制御装置及びそれを用いた光学機器
【課題】 環境条件や負荷条件、個体差に影響されにくい速度制御を行うことができる振動型モータの速度制御方法を提供する。
【解決手段】 振動型モータに印加される駆動用周波信号の位相差、周波数、または振幅を変更して回転速度を制御する速度制御手段と、振動体に発生する振動を検出する振動検出手段と、前記振動検出手段と前記駆動用周波信号との位相差を検出する位相差検出手段と、を有する振動型モータ制御装置において、
前記位相差検出手段からの信号に基づいて前記速度制御のいずれかを実行するものである。
(もっと読む)
振動アクチュエータ、それを備えるレンズ鏡筒及びカメラ
【課題】安定した駆動特性を有する振動アクチュエータ、それを備えるレンズ鏡筒及びカメラを提供する。
【解決手段】本発明の振動アクチュエータ(10)は、振動部材(11)に加圧接触され、前記振動部材(11)の振動により、前記振動部材(11)との間で相対移動する相対移動部材(14)と、前記振動部材(11)と前記相対移動部材(14)とを加圧接触させる加圧部材(18)と、前記加圧部材(18)の加圧力を、磁力によって調整する磁力発生部(18s,18c)とを備えること、を特徴とする。
(もっと読む)
61 - 80 / 224
[ Back to top ]