
Fターム[5J062AA08]の内容
Fターム[5J062AA08]に分類される特許
401 - 420 / 1,174
位置算出方法及び位置算出装置
【課題】カルマンフィルタ処理を用いた位置算出の正確性を向上させること。
【解決手段】携帯型電話機1を保持又は搭載した移動体の移動可能性、不定及び停止可能性それぞれについて、センサ部70の加速度センサ71の検出値適合範囲を設定するとともに、移動可能性の検出値適合範囲を最も広く設定することで、移動体の停止判定用のメンバシップ関数を設定する。そして、メンバシップ関数を用いたファジィ推定演算により移動体が停止状態にあるか否かを判定し、カルマンフィルタを用いた位置算出演算を行う際の誤差パラメータである観測誤差共分散行列「R」及びシステムノイズ行列「Q」の値を、停止状態にあると判定したか否かに応じて変更する。そして、最小二乗法を用いた位置算出処理により算出した移動体の位置を、カルマンフィルタを用いた位置算出処理により補正することで、出力位置を決定する。
(もっと読む)
ノード処理遅延のネットワークセントリックな決定
移動局の現在位置を決定するためにワイヤレスアクセスポイント内の遅延を較正する装置および方法を対象とする。ある方法は、傍受デバイスにおいて初期パケットを受信することと、傍受デバイスにおいて、別のエンティティによって送られる、応答パケットを受信することと、パケット到達時間に基づいて時間差を算出することと、現在位置決定エンティティに対して時間差を提供することと、を含む。別の方法は、情報を送るために適切な傍受デバイスに対してリクエストを提供することと、各適切な傍受デバイスから、ワイヤレスアクセスポイントによって送信されるパケットの到達時間と移動局によって送信されるパケットの到達時間との差を表す時間差を受信することと、時間差に基づいて処理遅延推定値を決定することと、処理遅延推定値と受信される時間差とに基づいて移動局の現在位置を決定することと、を含む。  (もっと読む)
(もっと読む)
無線通信システム、無線端末装置、および無線基地局装置

【課題】 MIMOアンテナを備えた無線端末装置が受信する、無線基地局装置からの電波の到来方向を検出することができる無線通信システム、無線端末装置、無線基地局装置を提供することを目的とする。
【解決手段】 無線端末装置SSおよび無線基地局装置BSがMIMOアンテナを備え、このMIMOアンテナから受信する電波の遅延時間差を用いて無線端末装置SSと無線基地局装置BSとの間の距離である第1の基地局端末間距離および第2の基地局端末間距離を算出し、無線基地局装置BSを基準とした無線端末装置SSの位置を無線端末装置へ通知することで、無線端末装置SSが受信する無線基地局装置BSからの電波の到来方向を無線端末装置SSへ表示する。
(もっと読む)
位置検出のための無線アクセス技術多様性の使用
1つ以上の無線アクセス技術からの測定値を用いてマルチモード移動体デバイスについて位置推定値を決定し、組み合わせた位置検出解を提供する種々の態様を開示する。ワイヤレス通信システムの多重無線アクセス技術能力を用いて、第1無線変調技法、無線ネットワーク・トポロジ、およびチャネル帯域幅によって特徴付けられる第1無線ネットワークにおいて、移動体通信デバイスの位置を検出することができる。次いで、この移動体通信デバイスを第2無線ネットワークに移すことができ、第2無線変調技法、無線ネットワーク・トポロジ、およびチャネル帯域幅によって特徴付けられる第2無線ネットワークにおいて、その位置を検出することができる。次いで、2つの位置推定値を用いて、組み合わせ位置推定値を求めることができる。 (もっと読む)
無線端末における位置推定方法、無線端末及び位置推定プログラム
【課題】測位電波を受信することができない環境にあっても、無線端末が相互に通信することで位置情報を推定すると共に、その位置情報の精度を高めることができる無線端末の位置推定方法、無線端末及び位置推定プログラムを提供する。
【解決手段】複数の無線端末が無線リンクを介して相互に接続されるネットワークシステムにおける無線端末の位置推定方法において、無線端末は、自無線端末の位置情報と位置情報の精度を高い順に規定したレベルとを保持し、通信可能な他無線端末を探索し、他無線端末の位置情報及びレベルを取得する第1のステップと、他無線端末のレベルと自無線端末のレベルとを比較する第2のステップと、自無線端末のレベルが他無線端末のレベルより低い場合、自無線端末から他無線端末までの推定距離を算出し、その推定距離に基づいて推定位置情報を算出する第3のステップとを有する。
(もっと読む)
補正データ送信装置、補正データ送信方法、補正データ送信プログラム、測位装置、測位方法および測位プログラム
【課題】センチメートル級の測位精度を維持したままで、基準点から観測点へ配信する補正データの伝送量を削減することを目的とする。
【解決手段】補正データ送信装置200は、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の搬送波位相に関する値とを計算する。さらに、補正データ送信装置200は、上記複数の基準点のそれぞれに固有な誤差量を示す基準点固有誤差を計算する。そして、補正データ送信装置200は、計算した擬似距離に関する値と搬送波位相に関する値と基準点固有誤差とを、補正データ201として測位装置300へ配信する。測位装置300は、補正データ送信装置200から配信された補正データ201と、観測点で受信した観測データとを用いて、移動体120の位置を算出する。
(もっと読む)
支援を受ける測位システムの向上
位置測定ユニットは、支援データ処理および中継モジュール(ソフトウェアクライアント)(1318)を有する。支援データ処理および中継モジュールは、全地球航法衛星システム(GNSS)支援データおよび/または非GNSS(たとえば無線測位システム)支援データといった局所化支援データを、支援を行うピア位置測定ユニットから得るとともに、支援を受けるピア位置測定ユニットに局所化支援データを中継する。中継は支援サーバを通じて行われてもよい。GPS受信機のような中継GNSS位置測定ユニットでは、チップ(1310)アーキテクチャは、多重周波数GNSSベースバンド(1311)、長距離通信のためのGSMまたはUMTSベースバンド(1312)、およびブルートゥース(登録商標)、Wi−Fi、またはUWBといった短距離ベースバンド(1313)を有する。支援データ生成モジュール(1316)は、中継GNSSユニットにて、GNSS R.F.フロントエンドおよび/またはGNSSベースバンドおよび/またはGNSSソリューションのソフトウェア部分を実行するマイクロコントローラから局所化支援データを生成する。支援データフィードモジュール(1317)は、GNSS位置測定ユニットのメインモジュールの任意の組合せに支援データを供給する。供給された支援データは、中継GNSSユニット自身または支援を行うGNSSユニットに由来し得る。 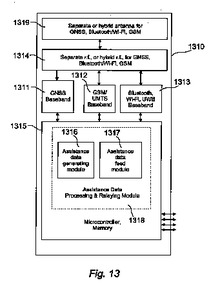 (もっと読む)
(もっと読む)
衛星位置決めシステム受信機を作動する方法および装置
【課題】衛星位置決めシステム受信機を作動する方法および装置
【解決手段】クライアント/サーバアーキテクチャにおいて衛星位置決めシステム(SPS)受信機を操作するための装置および方法。方法の1事例において、第1の時間に第1の複数の擬似距離が決定され、第1の時間の後の第2の時間に第2の複数の擬似距離が決定される。第1の複数の擬似距離および第2の複数の擬似距離は記憶される。第2の時間の後、第1の複数の擬似距離および第2の複数の擬似距離は、通常1つの送信でロケーションサーバに送信される。該ロケーションサーバはその後、該第1の複数の擬似距離から第1位置を決定し、該第2の複数の擬似距離から第2位置を決定する。1つの特定の例においては、該第1の複数の擬似距離および該第2の複数の擬似距離は、所定の種類の事象に応答して送信され、該ロケーションサーバは、時間にわたり収集されたディファレンシャルGPSデータの集合を記憶する。
(もっと読む)
測位システムにおける磁気計の使用
モバイル局は、地磁場の測定される特性を使用しておおよその緯度を決定する。おおよその経度もまた決定されることができる。モバイル局は、決定される場合には、おおよその緯度および経度を使用し、例えば、衛星信号のサーチおよび捕捉の間に衛星測位システム(SPS)における可視衛星のリストを決定することによって、及び/または、位置計算においてシード位置としておおよその位置を使用することによって、モバイル局についてのポジション・フィックスを決定することにおいて支援する。地磁場の特性は、例えば伏角または垂直強度であってもよく、3次元磁気計と3次元加速度計からのデータを使用して決定されることができる。磁場の瞬間値は、モーションの影響および大きなメタリックマスの存在を減らすために平均化されることができる。  (もっと読む)
(もっと読む)
測位制御装置及び測位制御方法
【課題】複数のアプリケーションから同時に測位要求できる環境において、測位要求の待機時間を短縮して早期に測位結果を返信する。
【解決手段】測位制御装置101は、異なる測位精度でGPSに現在地の測位を行わせるGPSハードウェア制御部104と、アプリケーション102,103からの測位要求に対して、当該測位要求で指定された測位精度に応じてGPSハードウェア制御部104に測位させ、この測位結果を取得して要求元のアプリケーション102,103に返信する測位要求管理部105とを備えている。そして、測位要求管理部105は、新規の測位要求の測位精度が最新の測位結果の測位精度よりも低い又は同じであると、最新の測位結果を再利用して、新規の測位要求に対して最新の測位結果を返信する。
(もっと読む)
長期予測軌道データの信頼性判定方法、長期予測軌道データの提供方法及び情報提供装置
【課題】長期予測エフェメリスの信頼性を判定するための手法を提案すること。
【解決手段】測位システム1において、サーバシステム3は、外部システム2から受信したGPS衛星SVの予測位置のデータである衛星予測暦と、予測位置に対応するGPS衛星SVの実績位置のデータである衛星精密暦とを用いて、少なくとも1日以上の生成対象期間における衛星軌道を予測した長期予測エフェメリスの信頼性を判定する。そして、信頼性の判定結果を長期予測エフェメリスに含めて、携帯型電話機4に提供する。
(もっと読む)
移動端末、測位方法
【課題】GPS衛星を利用できない場合でも、測位を容易に行う。
【解決手段】位置が既知である移動通信基地局50Kと移動端末10との距離、位置が既知であるデジタル放送送信所50Sと移動端末10との距離、位置が既知であり、かつ、電波時計の時刻情報を送信する電波時計情報送信所50Tと移動端末10との距離、をそれぞれ算出し、それらを組合せて利用する。こうすることにより、GPSが全く利用できない場合でも移動端末10の位置を特定することができる。
(もっと読む)
同行判定装置とその方法及びプログラム
【課題】位置計測手段による計測精度によらず常に高精度の同行判定を可能にする。
【解決手段】同行判定をする際に、同行データ抽出プログラム136により二者間の位置座標とDOP値をもとに計測距離dと合成誤差距離Rを算出すると共に、同行度算出プログラム134により上記算出された計測距離dと合成誤差距離Rをもとに同行度Fを算出する。そして、同行判定プログラム137により、上記算出された同行度Fを別途定めた2つのしきい値と比較し、さらに合成誤差距離Rをそのしきい値と比較することにより、二者が同行しているか否かを判定する。
(もっと読む)
携帯端末装置の方位を推定するための装置および方法
携帯端末装置の現在の方位(o(i))を現在の地理的位置と推定するための装置(60)であって、そこにおいて、現在の地理的位置で、現在の測定時間(i)に携帯端末装置の現在の方位(o(i))を有する現在の地理的位置で受信されうる無線送信機(22)の送信機識別および電磁信号特性を含む現在の測定パッケージ(MP(i))が決定されうり、装置は、現在の測定パッケージ(MP(i))と現在の測定時間の前に存在する基準時間に基準方位を有する基準測定パッケージに割り当てられる地理的基準位置で受信できた基準無線送信機の送信機識別、基準方位(ok)および電磁信号特性を含む基準測定パッケージ(RPk)との間の一致測定(acck)を決定するための手段(62)、一致測定(accn)を含む少なくとも1つの基準測定パッケージ(RPn)を選択するための手段(64)、および少なくとも1つの選択された基準測定パッケージ(RPn)の基準方位(on)に基づいて携帯端末装置の現在の方位のための推定(o´(i))を決定するための手段(66)を有する。 (もっと読む)
ドップラー効果を補正する装置を備える受信機
デジタル係数セットを含む時間デジタルフィルタの使用に基づくチャネル推定及び補正手段、並びにキャリア間干渉除去手段を有するOFDMデジタル通信受信機が提供される。受信機は、各々が所定のデジタル係数セット及びエントリポインタに対応するn個のルックアップテーブルLUT(n)を含む。  (もっと読む)
(もっと読む)
位置特定サービス能力を有する移動受信機
本明細書に開示される主題は、1つまたは複数の無線通信プロトコルに従って送信された信号を処理する能力がある受信機に関する。そのような受信機は、捕捉期間において、その受信機の位置の推定値を得ることを目的として、無線通信プロトコルのうち少なくとも1つに従って送信された信号から捕捉情報を得るための十分なリソースを有することができ得る。 (もっと読む)
無線通信装置、無線通信方法およびプログラム
【課題】無線通信装置、無線通信方法およびプログラムを提供すること。
【解決手段】段階的に送信電力を高めて無線信号を送信する送信部と、前記送信部から送信された無線信号に対する応答信号が第1の無線通信装置から受信されるようになると、当該無線信号の到達範囲と前回の無線信号の到達範囲との差分である自装置を中心とする中空円型の第1の範囲に前記第1の無線通信装置が存在すると推定する推定部と、を備える、無線通信装置。
(もっと読む)
移動局測位システム
【課題】基地局の時計に時間ずれやクロック速度の差が存在し、機器に固有の送信遅延時間および受信遅延時間が存在する場合においても、移動局の位置の算出を精度よく実行できる移動局測位システムを提供する。
【解決手段】各普通基地局12と基準基地局11とのクロック速度比と、各普通基地局12の時計と基準基地局11の時計との時計ずれと、基準基地局11における送信遅延時間および受信遅延時間とに基づいて測位信号の受信時刻を基準基地局11の有する時計に基づいた時刻に補正する受信時刻補正部(66、68、70)と、補正された受信時刻と、基準基地局11における測位信号の受信時刻と、普通基地局12および基準基地局11の位置情報とに基づいて移動局の位置を算出する測位部72とを含み、移動局10および基準基地局11は、移動局10による測位信号の送信と基準基地局による時計合わせ信号の送信との一方に応答して他方を実行する。
(もっと読む)
施設内ナビゲーションシステム
【課題】 短時間で通信を行う施設内ナビゲーションシステムを提供する。
【解決手段】 ゴルフ場1内のクラブハウスに設置される親機100と、カート501〜509に搭載されるカート機301〜309及びプレーヤが携行する携帯機401〜404とは、GHz帯域の特定小電力無線により通信する。短距離通信を中継するために、ゴルフ場1内には、中継器210〜214が設置される。親機100及び中継器210〜214の間の中継通信と、中継器210〜214とカート機501〜509及び携帯機401〜404との間の同報通信とは、互いに周波数の異なる特定小電力無線を使用する。同一中継器の中継通信と同報通信とは時期を異ならせて行われる一方、ある中継器と別の中継器との間では、中継通信と同報通信とが同一時期に行われる。
(もっと読む)
無線通信システム、及び移動局、並びに基地局
【課題】妨害波が存在する電波環境であっても、移動局からの電波信号の真の受信信号強度値を基地局で検出する。
【解決手段】移動局10と、複数の基地局12A〜Dとを有し、移動局10は、互いに所定の出力比となる複数の出力値を含む電波信号を送信し、各基地局12A〜Dは、受信された電波信号に基づき、複数の出力値にそれぞれ対応した複数の受信信号強度値を検出するRSSI部47を備える無線通信システム8であって、上記出力比と、上記複数の受信信号強度値とに基づき、各基地局ごとに妨害波の受信信号強度を算出し、算出した妨害波の受信信号強度と、所定のしきい値とを比較する。
(もっと読む)
401 - 420 / 1,174
[ Back to top ]