
Fターム[5J062BB05]の内容
Fターム[5J062BB05]に分類される特許
401 - 420 / 1,013
マルチモードのGPS使用可能カメラ
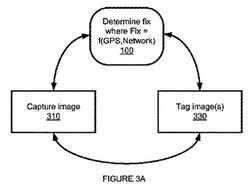
画像を取り込むことと、衛星信号とワイヤレスネットワーク信号との検出に基づいて、ポジションを決定することと、決定したポジションを画像にタグ付けすることとによって、画像に地理的タグ付けする方法およびデバイスを提供する。 (もっと読む)
GNSS暦の自律的な受信機内予測方法及び装置
全地球航法衛星システム(GNSS)の軌道状態及びクロック状態の自律的な受信機内予測の方法及び装置を記載する。GNSS放送メッセージのみを使用し、周期的な外部通信情報を必要としない。地球方位情報をGNSS放送暦から抽出する。地球方位パラメータの正確な推定により、慣性基準フレーム内で、最適に適合するGNSS軌道を、時間内に前向きに伝播させることができる。次に、推定した地球方位パラメータを用いて、予測した軌道を地球中心−地球固定(ECEF)座標に変換して、信号の取得に当たりGNSS受信機を支援するために使用する。GNSS衛星のクロック状態も放送暦から抽出して、このデータに、パラメータ化したクロック動作のモデルを適合させる。次に、モデル化したクロックを推定し、時間的に前向きに伝播させて、予測した軌道と共に、より迅速なGNSS信号取得を可能にする。 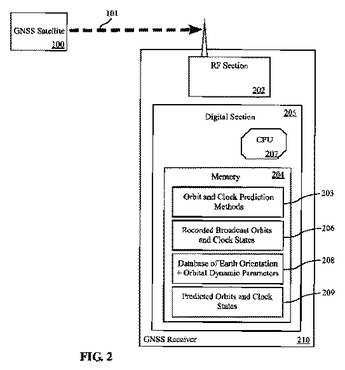 (もっと読む)
(もっと読む)
無線ネットワーク・ベースの位置推定
本発明は、無線ネットワーク(100)の中で、例えば、アクセス・ポイント(「AP」)(102A、102B、102C)及びクライアント装置(104A、104B、104C)などの装置の位置を概算することに関する。位置推定値は、APによって送信又は受信されたパケット(314)を観察/分析することによって得ることができる。例えば、パケットに関連したデータ転送速度情報は、装置とAPとの間の距離を概算するために使用される。これは既知の位置決め情報と接続して、APの概略の位置を推定することができる。装置がAPであるか又はその位置についての信頼度やメトリクス(404、406、408、410)も決定される。位置決定の精度は、伝搬及び環境要因、送信電力、アンテナ利得及びダイバーシチなどによって影響される。APの位置情報データベース(112)は、種々の装置からの時間にわたる測定値を使用できる。そのような情報は、クライアント装置の位置を特定し、かつそれらに位置ベースのサービスを提供できる。  (もっと読む)
(もっと読む)
現在地特定装置、現在地特定システム、現在地特定方法、及びコンピュータプログラム

【課題】1つの発信機からの信号を複数の受信機が受信した場合であっても、その発信機が存在する唯一の区画を特定する。
【解決手段】現在地特定システムは、対象に備えられた発信機7a〜hからの信号を受信する複数の受信機9a〜fと、該複数の受信機と通信可能に接続され、上記発信機からの信号を受信した受信機に予め割り当てられている区画を、対象の現在地として特定する現在地特定装置3とを含んで構成される。現在地特定装置3は、信号を受信した受信機のIDを受信情報DBに格納し、信号を2以上の受信機が受信した場合、1以上の条件に従い、該2以上の受信機にそれぞれ割り当てられている区画のうちの1つを、対象の現在地として特定する。上記1以上の条件は、所定の期間内に受信情報DBにIDが最も多く記録された受信機に割り当てられている区画を、対象の現在地として特定するという第1の条件を含む。
(もっと読む)
受信強度検出器および移動局測位システム
【課題】電波の受信強度を精度よく算出するための受信強度検出器、および、受信強度検出器によって得られる受信強度の値を用いて移動局の位置を算出する移動局測位システムを提供する。
【解決手段】受信強度測定部40(SB1)により、受信時間区間Tにおいて受信した電波の受信強度の瞬時値が所定の計測間隔毎に計測され、分割区間分布算出部42(SB2、3)により、受信時間区間Tを分割することにより得られる分割区間のそれぞれについての受信強度の瞬時値の瞬時値強度分布の分散σが算出され、対象区間判定部44(SB5)により、分割区間分布の分散の値が所定の閾値σ0よりも小さいことに基づいて、分割区間が受信強度算出対象区間であるか否かが判定され、補正受信強度算出部46(SB6)により、受信強度算出対象区間であると判定された分割区間についての受信強度の分布に基づいて、補正受信強度が算出される。
(もっと読む)
組み合わされたナビゲーション信号を処理するための方法
ここに開示される主題事項は、複数の全地球ナビゲーション衛星システム(GNSS)から受信される複数のナビゲーション信号成分を処理するためのシステム及び方法に関する。特定の実施形態において、第2ナビゲーション信号成分内の情報に少なくとも部分的に基づいて、第1ナビゲーション信号成分内のコード位相が検出されうる。 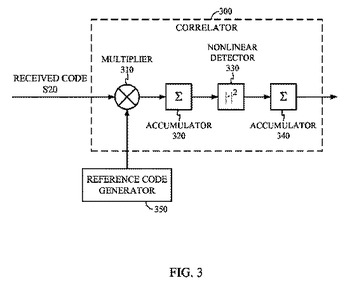 (もっと読む)
(もっと読む)
電子機器及び電子機器の制御方法
【課題】電池の状態に応じて適切な制御が可能な電子機器及び電子機器の制御方法を提供すること。
【解決手段】電池24と、電池24から電力の供給を受けて駆動し、衛星信号を受信し、受信した衛星信号から衛星情報を取得する演算処理を行うGPS装置50と、電池24の出力電圧を検出する電圧検出装置52と、電池24に対して、GPS装置50よりも軽い負荷を与える負荷部54と、受信演算部50、電圧検出部52及び負荷部54の動作を制御する制御部40とを含み、制御部40は、電池部24から受信演算部50への電力供給に先立って負荷装置54を動作させ、負荷装置54の動作中における電池24の出力電圧を電圧検出装置52により検出する第1の電圧検出処理を行い、検出された電池24の出力電圧に基づいて、負荷装置54の動作後におけるGPS装置50の動作を制御する。
(もっと読む)
GPS装置およびその測位方法
【課題】インフラであるDGPS基準局やDGPS信号の受信機構を受信機に搭載していなくても、誤差要因の解消を実現させることができるGPS装置およびその測位方法を提供。
【解決手段】GPSモジュール10置は、センサ処理部12で所定の時間あたりに端末装置の携帯者の加速度およびこの携帯者が進行する方位を取得し、情報処理し、受信処理部16でGPS衛星からのGPS信号48を受信し、受信したGPS信号48に含まれる情報を基に位置情報を取得して、所定の時間にわたって取得した位置情報を保持し、演算部14で取得した携帯者の加速度28および方位30から所定の時間あたりに3次元における軸それぞれの方向成分を用いて、端末装置の移動距離を演算し、演算した移動距離とGPS衛星から取得した位置情報とを用いて、擬似距離の誤差を解消して、GPS衛星の位置情報を補正する。
(もっと読む)
追跡システム
アセットの規定された地理的境界への進入および/またはそこからの退出を地理的に追跡し、それらを報告するための装置、方法およびシステム。進入および退出テストは、アセットが地理的境界に進入したかまたは退出したかを判断するために、位置フィックスを様々なしきい値およびパラメータと比較する。テストは、より低い複雑さレベル(より低い次数)を有するテストが、より高い複雑さレベル(より高い次数)を有するテストの前に実行されるように、順序付けられる。このようにして、たいていの位置フィックスは、従来どおり実装されるよりも低い次数の数学的複雑さを有する計算を使用して処理される。 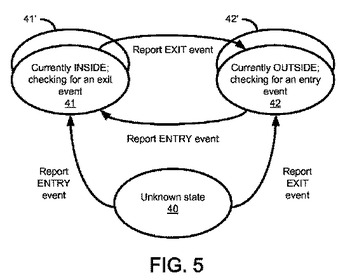 (もっと読む)
(もっと読む)
電界強度情報検出方法、受信機、送信機、および移動局測位システム
【課題】フェージングなどの影響により電界強度が変動する場合においてもその影響を低減した電界強度情報を取得する電界強度情報検出方法および該電界強度情報検出方法を用いた移動局測位システムを提供する。
【解決手段】品質評価部50(SA8)により、1回の受信に係る電波に含まれる複数の品質評価情報のそれぞれに基づいて受信した電波の品質を評価する品質評価値として相関値がそれぞれ算出され、電界強度情報算出部52(SA7)により、受信した電波の電界強度情報が前記複数の品質評価情報のそれぞれに対応する時間区間ごとに算出され、電界強度情報選択部54(SA9)により、品質評価部50によって算出される相関値が予め定められたしきい値を下回ることにより所定の品質を満たすとされる場合に、相関値を算出した品質評価情報に対応する時間区間における区間電界強度情報が電界強度情報として選択される。
(もっと読む)
移動局測位システム
【課題】送信機における電波の送信出力が変化する場合においても電波の受信強度に基づいて移動局の位置を精度よく算出することのできる移動局測位システムを提供する
【解決手段】送信基地局12Tから送信された電波が受信基地局12Rおよび移動局10において受信されその受信強度検出部40(SE6)、28(SF3)により受信強度が検出され、測距部52(SA21)により受信基地局12Rおよび移動局10における電波の受信強度、送信基地局12Tと受信基地局12Rとの間の距離、および受信基地局12Rおよび移動局10のアンテナ32、22の利得に基づいて、送信基地局12Tと移動局10との距離が算出され、測位部58(SA22)により少なくとも3局の各送信基地局12Tと移動局10との距離に基づいて移動局10の位置が算出されるので、送信基地局12Tにおける送信出力の大きさを用いずに移動局10の位置を算出することができる。
(もっと読む)
測位システム、測位システムに適用可能な送信機および受信機
【課題】ノイズやマルチパスの影響下においても精度のよい測位システムを提供する。
【解決手段】移動局10においては、符号発生部28によって発生される第1符号と所定時間だけ遅れた第2符号とにより、変調部34において第1搬送波と所定位相だけ遅らされた第2搬送波とがそれぞれ変調させられ、合成部44により変調後の信号が合成され送信される。基地局12においては、復調部78により第1基準搬送波および所定位相だけ遅らされた第2基準搬送波に基づいて受信波が復調され、相関演算部88により復調された2つの信号と対応する符号との相関値がそれぞれ算出され、差動アンプ96により算出された2つの相関値の差分が算出され、受信時刻検出部70により2つの相関値の差分に基づいて電波の受信時刻が算出される。また、測位部100はその受信時刻に基づいて移動局10の位置を算出する。
(もっと読む)
施設内ナビゲーションシステム
【課題】 短時間で通信を行う施設内ナビゲーションシステムを提供する。
【解決手段】 ゴルフ場1内のクラブハウスに設置される親機100と、カート501〜509に搭載されるカート機301〜309及びプレーヤが携行する携帯機401〜404とは、GHz帯域の特定小電力無線により通信する。短距離通信を中継するために、ゴルフ場1内には、中継器210〜214が設置される。親機100及び中継器210〜214の間の中継通信と、中継器210〜214とカート機501〜509及び携帯機401〜404との間の同報通信とは、互いに周波数の異なる特定小電力無線を使用する。同一中継器の中継通信と同報通信とは時期を異ならせて行われる一方、ある中継器と別の中継器との間では、中継通信と同報通信とが同一時期に行われる。
(もっと読む)
長期予測軌道データの信頼性判定方法、測位方法、測位装置及び測位システム
【課題】長期予測エフェメリスの信頼性を判定するための手法を提案すること。
【解決手段】測位システム1において、携帯型電話機4は、サーバシステム3から受信した長期予測エフェメリスデータを用いて、測位演算に必要な数以上のGPS衛星SVを組合せた複数の衛星組合せに基づいて測位演算を行う。そして、衛星組合せそれぞれに含まれるGPS衛星SVの異同と、衛星組合せそれぞれについて行った測位演算結果の差とに基づいて、長期予測エフェメリスデータに含まれる各GPS衛星SVそれぞれの予測軌道の信頼性を判定する。
(もっと読む)
初期位置決定方法、測位方法及び測位装置
【課題】測位演算をする際の初期位置を決定するための新たな手法を提案すること。
【解決手段】地球上に、携帯型電話機2の所在地を含むと想定される位置範囲であるフレームを設定し、当該フレーム内にグリッドと呼ばれる候補位置を格子状に配設する。そして、複数のグリッドそれぞれについて、GPS衛星との間の幾何学的距離の端数部分と、観測された擬似距離の端数部分との差を第1APR値として算出し、第1APR値が小さい順にN個のグリッドに絞り込む。その後、絞り込んだN個のグリッドを仮の初期位置としてGPS衛星信号に基づく位置収束演算を行うことで、グリッドをさらにM(<N)個に絞り込む。そして、絞り込んだM個のグリッドそれぞれについて、GPS衛星との間の幾何学的距離と、観測された擬似距離との差を第2APR値として算出し、第2APR値が最も小さいグリッドを測位演算に用いる初期位置として選定する。
(もっと読む)
測位装置、コンピュータプログラム及び測位方法
【課題】アンビギュイティの算出を高速化し、都市部などにおけるRTKの測位が可能な時間を大幅に増加させることができる測位装置、コンピュータプログラム及び測位方法を提供する。
【解決手段】衛星用通信部12は、各衛星との擬似距離を測定するコード位相測定部121、各衛星の搬送波の位相を測定する搬送波位相測定部122、各衛星の搬送波の周波数を測定する搬送波周波数測定部123などを備えている。処理部11は、各衛星の搬送波の周波数を測定してドップラーシフトを求めることにより、測位対象100の速度ベクトルを算出する。処理部11は、測位前の測位対象100の位置をAとし、速度ベクトルをVとし、速度ベクトル算出の時間間隔をTとすると、解の探索範囲の中心Bを、B=A+T・Vにより求め、解の探索範囲を制限してアンビギュイティを決定する。
(もっと読む)
GNSS衛星による位置測定方法と装置
【課題】位置計算を航行メッセージの読み取りなしで、そして、ネットワークからのアシスト情報もなしで計算可能とする。
【解決手段】位置計算はコードと周波数の観測値とメモリーに保存される予測エフェメリスデータを利用して行われる。コードと周波数の観測値と予測値の差にもとづいて計算された損失関数が位置計算に使われる。位置計算は全地球衛星航法システム信号の1コード周期の利用で可能である。位置計算装置はフロントエンドと航行ユニットから構成される。フロントエンドユニットと航行ユニットは分離されている。デジタル化された中間周波数データはフロントエンド・ユニットから航行ユニットへ直接かデータ・リンク経由で通信可能であり、後の利用のためにメモリーに保存することも可能である。
(もっと読む)
パラメータ値算出方法、長期予測軌道データの提供方法、情報提供装置及び測位システム
【課題】長期予測エフェメリスを生成するための新たな手法を提案すること。
【解決手段】測位システム1において、サーバシステム3は、衛星軌道の所定の有効期間を区分する予測対象期間の長さを、将来になるほど長くなるように可変に設定する。より具体的には、外部システム2から取得した衛星精密暦に含まれる過去の予測位置に対応するGPS衛星SVの実績位置と、外部システム2から取得した衛星予測暦に含まれる過去の予測位置との差で表される予測誤差が大きいほど、予測対象期間の長さを長く設定する。そして、設定した複数の予測対象期間それぞれについて、衛星予測暦に基づいて、ケプラーの楕円軌道モデルに従ったGPS衛星SVの予測軌道を求め、衛星軌道パラメータの値を算出する。そして、算出した衛星軌道パラメータの値を予測対象期間毎に纏めた長期予測エフェメリスデータを生成して、携帯型電話機4に提供する。
(もっと読む)
GPS搭載携帯端末及びGPS信号復調方法
【課題】本発明は、GPS信号に対する同期獲得を高速で実行し消費電力を低減するようにする。
【解決手段】本発明は、GPSの衛星から送信されるGPS信号S1と同期したCDMAセルラーシステムの基地局からのスペクトラム拡散信号S10を受信し、当該スペクトラム拡散信号S10に基づいてGPS信号S1の同期を獲得するために用いるリファレンス信号としてのシステムタイム信号S17を生成し、GPS信号S1を受信しシステムタイム信号S17に基づいてGPS信号S1におけるPNコードとの同期を獲得するようにしたことにより、GPS信号S1におけるPNコードとの同期獲得をシステムタイム信号S17に合わせて短時間で実行し得るので消費電力を一段と低減することができる。
(もっと読む)
衛星ナビゲーション受信器を制御するためのシステム及び方法
【課題】衛星ナビゲーション受信器を制御するためのシステム及び方法。
【解決手段】衛星ナビゲーション受信器は、処理ユニット、クロック生成器、及び電力管理インタフェースを含む。処理ユニットは、複数の衛星信号に従って衛星ナビゲーション受信器を発見するよう動作可能である。処理ユニットに接続されたクロック生成器は、処理ユニットに参照クロックを提供するよう動作可能である。処理ユニット及びクロック生成器に接続された電力管理インタフェースは、複数の動作状態で衛星ナビゲーション受信器を切り替えるよう動作可能である。動作状態は、処理ユニットが電力オフされ、クロック生成器が電力オンされるスリープ状態を含む。
(もっと読む)
401 - 420 / 1,013
[ Back to top ]