
Fターム[5J062CC07]の内容
Fターム[5J062CC07]に分類される特許
2,101 - 2,120 / 2,510
測位装置
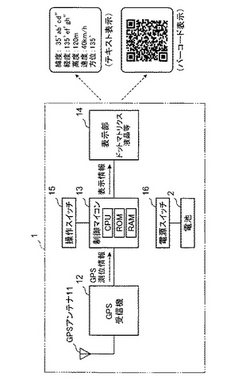
【課題】 単独で自機位置の測位が可能な携行用の測位装置において、特定した自機の位置の情報を、周辺地図等の詳細な表示が可能な携帯端末に容易に転送できるようにする。
【解決手段】 GPS受信機12がGPS測位に必要なGPS衛星情報をGPS衛星からの信号で受信し、得られたGPS衛星情報を用いて複数のGPS衛星からの信号を受信し、制御マイコン13が受信した信号を演算することで、単独で自機位置を特定し、表示部14に表示する測位装置1において、制御マイコン13は、表示部14での自機位置の表示を、テキスト表示だけでなく、バーコード情報での表示を可能とする。したがって、バーコード情報の読取り機能を有し、GPS測位可能な携帯電話機に、自機位置の情報を容易に転送することができ、該携帯電話機側では、逐次自機位置を更新しつつも、GPS衛星情報の取得や自機位置の演算のための通信は発生せず、通信費用を抑制することができる。
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体

【課題】移動しつつ現在位置を計算する場合において、出力位置の直進性及び連続性を向上することができる測位装置等を提供すること。
【解決手段】測位情報格納手段Buff2に格納されている測位情報P2に基づいて、回帰直線L1を生成する回帰直線生成手段と、回帰直線L1上の現在位置を示す回帰直線上位置情報を生成する回帰直線上位置情報生成手段と、暫定位置P6と回帰直線上位置P7の平均位置P8を示す平均位置情報を生成する平均位置情報生成手段と、平均位置情報に基づいて、回帰直線L1を更新して更新回帰直線L2を生成する更新回帰直線生成手段と、更新回帰直線上の現在位置P9を示す更新回帰直線上位置情報を生成する更新回帰直線上位置情報生成手段と、更新回帰直線上位置情報を出力する更新回帰直線上位置情報出力手段と、を有する。
(もっと読む)
レーダー探知機
【課題】 道路種の手動設定の煩わしさを回避し、車両が走行している実際の道路種をより正確に自動的に判定することができ、警報の誤発信等を防止することなどが可能なレーダー探知機を提供する。
【解決手段】 車両に取り付けられ、速度取締装置が設置されている場所を探知するレーダー探知機1であって、速度取締装置の位置情報を、速度取締装置が設置されている道路種とともに記録した記録部2と、車両の現在位置を検知する現在位置検知部3と、車両が走行している道路種を判定する道路種判定部4と、警告を発する警告部6と、レーダー探知機の動作を制御する制御部5とを備え、制御部5は、現在位置検知部3が検知した車両の現在位置に基づいて、車両が、道路種判定部4が判定した道路種に関連づけて記録部2に記録したいずれかの速度取締装置に近接したと判定した場合には、警告部6から警告を発する。
(もっと読む)
無線通信網とA−GPS方式を用いた移動通信端末機の位置決定の性能評価方法及びシステム
無線通信網とA-GPS方式を用いて移動通信端末機の位置を決定する際,IS(Interim Standard)-801-1規格の各種パラメータを用いてLBS(Location Based Service)無線通信網の位置決定に関する性能を総合的に評価するための方法及びシステムに関し,LBS無線網分析プログラムは,所定のコンピュータ言語でコーディングされており,LBSメッセージを分析して1つ以上の基準により分析メッセージを表示し,無線通信網と関連した情報,GPS人工衛星情報及びLBSメッセージに含まれた測位座標値をテキスト及び/またはイメージに加工して表示する。  (もっと読む)
(もっと読む)
測位装置、測位方法および測位プログラム
【課題】 測位位置のバラツキのある環境下における測位精度を向上させる。
【解決手段】複数の測位位置を用いた重み付き回帰推定に基づいて現在位置を推定する重み付き回帰推定手段7および複数の測位結果に基づいて重み付き回帰推定における重みを算出する重み算出手段6をフィルタリング処理手段5に設け、複数の測位結果に基づいて重み付き回帰推定における重みを更新しながら、複数の測位位置を用いた重み付き回帰推定に基づいて現在位置を算出する。
(もっと読む)
測位システム、測位端末、測位端末の制御方法、測位端末の制御プログラム、測位端末の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】屋内においても短時間かつ低消費電力で測位端末が位置通知を行うことができる測位システム等を提供すること。
【解決手段】建物の出入り口に設置され、測位端末が出入り口を通過する際に建物位置情報を送信する建物位置情報提供装置と、建物の出入り口を通過する際に建物位置情報提供装置から建物位置情報を受信する測位端末とを有する測位システムであって、測位端末の動作設定手段は、出入り口を通過する際に位置算出手段の動作を禁止または許可し、測位端末の位置通知手段は、位置算出手段の動作が許可されているときは、位置算出手段で算出した位置情報を、位置算出手段の動作が禁止されているときは、位置情報提供装置から受信した位置情報を、位置要求プログラムに通知することを特徴とする測位システム1。
(もっと読む)
測位装置による移動状況の検出装置
【課題】 本発明はGPS機能を有する携帯機器に関し、特に測位装置のみによって携帯機器を所持する者の移動状況を判断し、対応する適切なサービスを自動的に提供することができる測位装置による移動状況の検出装置である。
【解決手段】 本発明は測位装置2によって測定した情報を速度・角速度算出装置3によって計算し、予め設定された速度・角速度・モード対応テーブル5を参照し、上記計算結果に対応する移動モードを選択し、サービス提供装置A〜Cが供給するサービスの中の最適なサービスを自動的に選択する構成であり、加速度センサ等の他のセンサを使用することなく、測位装置のみによって自動的に移動手段を知ることができる構成である。
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】位置情報とともに、屋内屋外を含む環境情報を送信することができる測位装置等を提供すること。
【解決手段】測位衛星12a等からの信号である衛星信号S1等を受信する衛星信号受信手段と、衛星信号に基づいて、現在位置を示す現在位置情報を生成する現在位置情報生成手段と、衛星信号の信号強度を示す信号強度情報を生成する信号強度情報生成手段と、信号強度情報に示される信号強度が、屋内領域に対応する屋内対応信号強度範囲内であるか否か、及び/又は、屋外領域に対応する屋外対応信号強度範囲内であるか否かを判断する信号強度評価手段と、信号強度評価手段による判断結果に基づいて、現在位置が前記屋内領域内であるか、又は、屋外領域内であるかを示す情報を含む測位環境情報を生成する測位環境情報生成手段と、前記現在位置情報及び前記測位環境情報を送信する情報送信手段と、を有する。
(もっと読む)
交通システム
【課題】車両とD−GPS基準局との距離にかかわらずGPS衛星からの信号に基づく車両の位置情報の補正ができ、この補正により車両の正確な位置情報が取得可能な交通システムを提供する。
【解決手段】車載器2と通信可能な複数の地上装置3を備え、車載器2は、車両GPS情報をGPS衛星からの信号を受けて取得すると共に車両GPS情報を地上装置3に送信し、地上装置3は、地上装置GPS情報をGPS衛星4からの信号を受けて取得する地上装置用GPS情報取得手段31と、地上装置GPS情報と予め設定された地上装置3の位置情報とに基づいて地上装置GPS情報に対する誤差情報を取得する地上装置用誤差情報取得手段351と、車両GPS情報を車載器2から受信する地上装置用通信手段32と、受信された車両GPS情報を誤差情報に基づいて補正する地上装置用補正手段36とを有する。
(もっと読む)
位置特定システム及び位置特定方法
移動体コントローラ装置(200)は、無線位置特定システム(204)と双方向通信システム(202)とを有し、ローバ装置(214)も、無線位置特定システム(218)と双方向通信システム(216)とを有する。コントローラ装置(200)は、ローバ装置(214)にその位置データを、ローバ装置を位置特定し、所望の場合には、迷子や落し物などにおいて探索することが可能であるように送信することを命じることが可能である。コントローラとローバとの間の相対位置を、コントローラ上に、ローバの場所を示す矢印、更には、それの移動速度、その移動の追跡や他のデータとともに表示(208)することが可能である。システムは、PDEを有するネットワーク・システム(212)と、通信機能及び算出機能の一部を行うアプリケーション・サーバ(210)とをともに動作することも可能である。 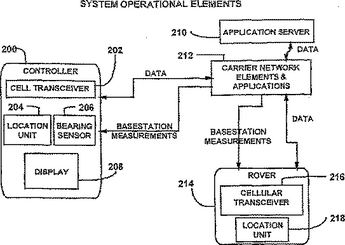 (もっと読む)
(もっと読む)
衛星測位方法
【課題】移動体の正確な位置決定を、サーバーと移動体との時刻同期を省略して達成でき、さらに、サーバーは、エフェメリスデータと衛星時刻エラーデータと概略位置情報を、移動体に与えるだけで、正確な位置を決定できる衛星測位による位置決定方法の提供を目的とする。
【解決手段】 3次元測位では最低限5個の衛星からの信号を使用する。最小限X,Y,Z,Tの未知数を有する方程式で擬似距離測定を行う。なお、(X,Y,Z)があらかじめ定義された座標系における3次元の移動体位置であり、Tが全衛星についての擬似距離を決定する同期測定時刻とする。上記方程式中の各衛星位置は時刻Tのベクトル値関数fk (T)であり、fk が、通信回線5を通じて移動体2に送られる衛星エフェメリスデータ3又はその等価物と、移動体2の近似位置と、から決定される。
(もっと読む)
車両走行検証システム、車両走行検証方法及びプログラム
【課題】 GPS衛星観測データの捏造自体を検出できる車両走行検証システム、車両走行検証方法及びプログラムを提供する。
【解決手段】 GPS衛星抽出部12、入力部10が車両から取得したGPS衛星観測データから走行軌跡を算出するのに使用したGPS衛星の番号を抽出する。次に、GPS衛星演算部14は、入力部10が取得した車両の走行軌跡のデータに基づき、対象車両の走行軌跡を求めるために直接波を使用できたGPS衛星の番号を求める。比較部16は、GPS衛星抽出部12が抽出したGPS衛星の番号とGPS衛星演算部14が求めたGPS衛星の番号とを比較し、両者が完全に一致した場合は対象車両の走行軌跡を求めるためのGPS衛星観測データが捏造されていると判断し、データ不正警告信号を出力する。
(もっと読む)
潮流測定装置及び潮流測定方法
【課題】対地速度と対水速度の差から潮流を測定する潮流測定装置において、船体の動揺に起因する超音波信号の送波時と受波時における船体位置の相違を潮流測定演算時に補正し、動揺誤差を是正した正確な潮流測定を行うことができる潮流測定装置を提供する。
【解決手段】 GPS受信機4を用いて測定した超音波信号の送信時、対水信号周波数の測定時、及び対地信号周波数の測定時における正確な対地船体速度を用いて、対水信号周波数から算出される対水速度、及び対地信号周波数から算出される対地速度の動揺誤差を補正する。これにより、船体の動揺が潮流測定に与える影響を防ぎ、正確な潮流を得ることが可能になる。
(もっと読む)
車載用ナビゲーション装置
【課題】分岐する2本の道路のなす角度が微小であっても分岐後の自車位置を高精度に表示できる「車載用ナビゲーション装置」を提供する。
【解決手段】車載用ナビゲーション装置は、メモリ手段と、走行状態検出手段と、GPS受信手段と、制御手段とを有する。前記制御手段は、第1の道路上の分岐点での第2の道路のなす角度が所定の分岐角度より小さく(S11)且つ分岐後の前記第1の道路と第2の道路のなす角度が所定の角度より小さい(S12)場合において、自車位置が前記第1又は第2の道路に進入したことを検出したときに、GPS測位点を中心とした誤差円を所定の割合で段階的に小さくしながら(S15)該誤差円の範囲内に前記自車位置が存在するか否かを判定し、当該誤差円の範囲から自車位置が外れたときに該自車位置を前記第1又は第2の道路のうち当該誤差円の範囲内の道路にマッチングさせる。
(もっと読む)
全地球測位システムにおけるトロポシェア誘導エラーの補正
衛星位置決めシステムすなわち全地球的航法衛星システムの受信機が使用するデータを得るための方法には、気象情報及び地域的又はグローバルなグリッド点の三次元のマップを用いて、サーバ(200)が受信機から遠く離れてデータを得るステップが含まれる。これらのグリッド点から、それは気圧、温度及び水データの内容に対する大気圏の測定から得られた屈折度フィールドによるレイトレーシングによって対流圏の遅延を計算する。そのような測定値は、気象学的なボディから入手できる。天頂遅延を与える非気象学的な天候ベースのモデル(130)及びそれらを特定の勾配にマッピングする手段(130’)を含むユーザ用受信機によって決定された位置を高めるために使用される場合、サーバはそのような非気象学的なモデル(230)のコピーも含み、そのレイトレースされた遅延値を天頂遅延として提供する。対応するグリッド点に対する天頂遅延値の組はサーバの中で比較され(260)、修正値が作られる(好ましくは、分数の形式で)。これらの修正値によって、補正が必要な非気象学的な遅延値が正確なものにされる。補正値の組は画像圧縮技術(270)によって縮小され、全地球的航法衛星システムの衛星(1101など)を介して低いデータ転送速度でユーザ用受信機に送信される。この受信機は、単に補正値をそれ自身のモデルによって得られた天頂遅延に適用する。ユーザの位置が知られている場合は、サーバは直接受信機の位置に対する正確な対流圏の遅延値を送信するために得ることができる。  (もっと読む)
(もっと読む)
ワイヤレス・デバイスの場所特定のために、位置検出精度を高め、リアル・タイム・オーバーヘッド画像を用いるための、移動および/または航空機搭載センサによる商用ワイヤレス位置検出システム(WLS)の改善
移動体LMUをワイヤレス位置検出システムにおいて用い、適当な受信機カバレッジを欠く区域において、検出カバレッジを設ける。移動体LMUは、ワイヤレス・ハンドセットおよびデバイスからの無線周波数(RF)送信をある時間期間にわたって検出し、これらの場所の判定を可能とするために用いることができる。移動体LMUの時間、位置、および速度を計算し、ワイヤレス・デバイスから受信したあらゆる送信と共に、SMLCに送信する。SMLCは、ワイヤレス・デバイスのドプラ成分を分析および解明しつつ、移動体LMUのドプラ成分を補償する。ワイヤレス・デバイスの位置および速度は、移動体LMUプラットフォームが撮影したリアル・タイム画像と比較して、ワイヤレス・デバイスの場所を高精度に判定することができる。非常に微弱であるおよび/またはノイズによって変転している可能性がある対象信号を検出する移動体LMUの能力を改善するために、低電力の移動体端末の信号を、受信サイトにおいて受信しメモリに格納するプロセスを採用することができる。次いで、SOIよりも強力な複製を、後の時点においてネットワーク・コントローラまたはBTSから受信し、これを用いて、メモリにおけるSOIの相関処理を改善する。 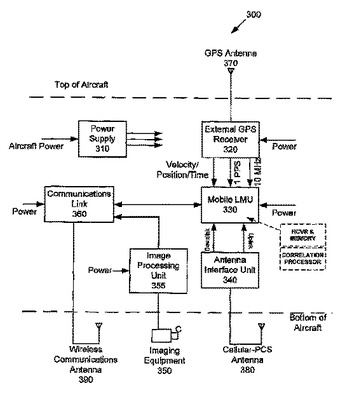 (もっと読む)
(もっと読む)
GPS衛星用基準局システム
【課題】 高高度移動体の位置決定に影響する周囲環境等の排除を図る。
【解決手段】 3つのレーザ測距基地局16a等からGPS衛星用基準局12の再帰反射体14に向けて測距用レーザを放射し、その測距用レーザの再帰反射により各レーザ測距基地局16a等に到達した測距用レーザを検出してレーザ測距基地局毎のレーザ測距基地局16a等と再帰反射体14との間の距離を算出し、これら3つの距離に基づいて再帰反射体14の位置を決定し、そしてこの位置と、再帰反射体14とGPS受信アンテナ20との相対的な位置と、姿勢センサ22の姿勢情報とに基づいてGPS受信アンテナ20の位置を決定する。
(もっと読む)
現在位置算出装置および現在位置算出方法
【課題】実測値にしたがった現在位置算出の迅速化を図ること。
【解決手段】現在位置算出装置は、移動体の移動状態に応じて変動する検出信号を検出する検出部201と、検出部201によって検出された検出信号のデジタル変換を行う変換部202と、移動体の測位情報を取得する取得部203と、取得部203によって測位情報を取得した時刻を測位時刻情報として変換部202に出力する出力部204と、変換部202を介して出力された測位時刻情報に基づいて、取得部203によって取得された測位情報および変換部202によってデジタル変換された検出信号との同期を取る同期部205と、同期部205によって同期が取られた測位情報および検出信号に基づいて、移動体の現在位置を算出する位置算出部206と、を備えることを特徴とする。
(もっと読む)
アンテナ装置およびその製造方法
【課題】 製造が簡単で重量も軽く、受信性能の高いアンテナ装置を提供する。
【解決手段】 誘電体からなる保持部材10と、この保持部材10の外表面に配置される銅系の金属材料からなる薄板状の電極部11とを備えたチップ形状のアンテナ装置6である。従って、幅広い周波数の電波に対応することができ、これにより人口衛星などからの電波を受信しやすく、居場所を特定するGPS用として良好に用いることができる。また、保持部材10の外表面に電極装着部12を凹部形状に形成し、この電極装着部12に電極部11を嵌着させて固定した。従って、圧入により簡単に電極部11を保持部材10の電極装着部12に固定できる。このため、製作が簡単で重量も軽いばかりか、誘電率の変化が激しい両面接着テープや接着剤を用いていないので、受信性能の高いものが得られる。
(もっと読む)
ナビゲーションシステム、その制御方法及び制御プログラム
【課題】ナビゲーションの技術において、加速度センサから得る加速度値の累積値と、GPSによる位置データの変化量から求める車速との対照データの利用により、GPS衛星電波の不十分な場合でも、車両ECUとの配線接続や車速信号無しで車速を高精度に推測すること。
【解決手段】累積部11は、車両の加速度又は加速度に対応する値を加速度値として取得し、その累積値を算出する。車速算出部12は、GPSで得る位置の変化量に基き車速を算出し、記録部13は、同じ時点における前記累積値と前記車速との各組を対応付けて対照データDとして記憶メディア部5に記録する。推定処理部14は、前記GPSにおける衛星電波の受信状態が不十分な場合に、現時点における前記累積値をもとに、対照データDを参照し同じ累積値又は近い累積値に対応付けられた車速により、現時点の車速を推定する。
(もっと読む)
2,101 - 2,120 / 2,510
[ Back to top ]