
Fターム[5J062CC07]の内容
Fターム[5J062CC07]に分類される特許
361 - 380 / 2,510
測位支援装置
【課題】本発明は、衛星航法に基づく測位系において、航行衛星から通知され、その航行衛星に搭載された時計が示す時刻の有効期間を延長する測位支援装置に関し、精度よく安定に航行衛星から正常に受信された衛星時刻の有効期間を大幅に延長することができることを目的とする。
【解決手段】時系列iの順に、航行衛星によって航法データが送信された時刻ti以降における前記航行衛星上の時刻Tiを個別に与え、かつ前記航法データで与えられる予測関数Fpiを蓄積するログ手段と、前記時系列iにおける値が前記時刻Tiの近似値もしくは前記時刻Tiであり、かつ前記時系列iの逆順に先行する所定の数Nの時点において、前記予測関数Fpiに対する偏差が既定の範囲に抑えられ、あるいは最小である予測関数Fpi′で前記予測関数Fpiを補完する補完手段とを備える。
(もっと読む)
通信システム、通信方法、プログラム及び情報記憶媒体

【課題】近距離無線通信を用いることなく、同じ生活圏内にいる他のユーザの存在を実感できるようにすること。
【解決手段】複数のユーザ端末から位置を取得する位置座標受信部80と、注目ユーザ端末から位置を取得する場合に、前記複数のユーザ端末のうち、該位置と前記複数のユーザ端末から取得される位置とに応じた一部を選択するとともに、選択される前記ユーザ端末に関する情報を前記注目ユーザ端末に提供する近傍ユーザ配信部94と、を含む。
(もっと読む)
累積誤差を占めるパラメータ推定値のための信頼性指標
【課題】相関分析を用いて、信号から導出されるパラメータ推定値のための信頼性指標を生成する方法を提供する。
【解決手段】非視線信号条件が存在するか、又は存在しそうであるかを示すインジケーションを取得すること、及び/又は複数経路信号条件が存在するか、又は存在しそうであるかを示すインジケーションを取得することによって開始する。これらインジケーションに応じて、パラメータ推定値について信頼性指標を導出する。このパラメータ推定値は信号の到着時間推定値であり、信頼性指標は到着時間推定値の自乗平均平方根誤差である。そしてピークにおける相関関数の強度の測定値に基づいて、非視線信号条件が存在するか、あるいは存在しそうであるかを示すインジケーションを取得する。ピークにおける相関関数の強度測定値は、合計受信出力で除されたチップ毎のエネルギー(EC/I0)であるか、又はピークにおける相関関数のエネルギーである。
(もっと読む)
測位支援装置
【課題】本発明は、衛星航法に基づく測位系において、航行衛星の位置、速度、加速度の何れかに生じる欠落を補完する測位支援装置に関し、地形や地物の分布に柔軟に適応し、かつ精度よく安定にリアルタイムによる測位を可能とすることを目的とする。
【解決手段】軌道データで時系列tの順に定まる航行衛星の速度Vt を蓄積するログ手段と、前記航行衛星の速度vt0と、前記速度vt0に対する誤差が所定の範囲内にある速度vt1〜vtnとを得る候補取得手段と、前記速度vt0、vt1〜vtnの内、前記時系列tの順に前記航行衛星に作用する外力Ftと前記航行衛星の質量mとの比の前記時系列tの逆順における積分の結果との和の前記ログ手段に先行して蓄積された所定の数Nの速度Vtに対する偏差が規定の範囲内にあり、あるいは最小である特定の速度で前記航行衛星の速度を補完する補完手段とを備える。
(もっと読む)
位置検出装置および位置検出方法
【課題】GPS受信部による測位を適切に遂行しつつ、電力消費を効率的に抑制することが可能となる。
【解決手段】本発明の位置検出装置120は、GPS衛星からGPS信号を受信し、追尾できているGPS衛星から受信したGPS信号に基づいて測位を行うGPS受信部150と、GPS受信部に電力を供給するGPS電源部152と、GPS受信部が捕捉したGPS衛星の数と受信レベルに応じて停止時間を導出する停止時間導出部172と、GPS受信部がGPS衛星を追尾できない期間が第1所定時間経過すると、導出された停止時間、GPS電源部に、GPS受信部への電力の供給を停止させる停止制御部174とを備える。
(もっと読む)
無線通信品質の測定地点を算出するサーバ、その方法及びそのプログラム
【課題】無線通信品質が劣化し、又は、無線が不通となった情報を正確に求める。
【解決手段】端末がGPS衛星群から受信した信号から算出した緯度経度に受信の時刻を関連付けた情報、端末が計測した加速度と地磁気に計測の時刻を関連付けた加速度・地磁気/時刻情報を端末から取得して端末の移動経路を導出する位置情報導出部、端末が計測した電波の電界強度と干渉レベルに計測の時刻を関連付けた情報を端末から取得し、その情報を移動経路に時刻について関連付けることにより無線通信品質が劣化した地点等を特定した情報を導出する無線通信品質劣化情報導出部を備え、位置情報導出部は、GPSでの測位から算出された緯度経度を起点として、加速度・地磁気/時刻情報に含まれる加速度を、加速度・地磁気/時刻情報により示される移動方向に沿って時間積分することにより、移動経路を導出する。
(もっと読む)
情報処理装置、表示制御方法、プログラム及び情報記憶媒体
【課題】地図を表示させることなく、測位手段により測定された位置の軌跡をユーザに理解しやすい形で表示すること。
【解決手段】位置を順次測定する測位部60と、前記測位部60により測定される位置を複数記憶する位置座標記憶部62と、前記位置座標記憶部62に格納される位置を示す文字列を測定順に並べて表示する他ユーザ情報提供部70と、を含み、測位部60は、新たに測定された位置が前記位置座標記憶部62に記憶されている最新の位置から所定距離以上、離れている場合に、前記新たに測定された位置を前記位置座標記憶部62に格納する。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、前記自立航法軌跡と地図情報が示す道路の形状とが最も一致する道路を前記車両が走行している道路とみなすマップマッチング処理によって特定される時系列の前記車両の軌跡であるマッチング軌跡を当該マッチング軌跡の信頼度とともに取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して前記GPS軌跡の信頼度を取得し、前記GPS軌跡と前記マッチング軌跡のうち、より高い信頼度の軌跡を補正目標軌跡とし、前記自立航法軌跡と前記補正目標軌跡との相違が減少するように前記自立航法情報を補正する。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して、前記自立航法軌跡と前記GPS軌跡との相違が減少するように前記自立航法情報を補正する。
(もっと読む)
位置情報提供システム
【課題】GPS信号の伝送の安定性を向上することができる、位置情報提供システムを提供すること。
【解決手段】位置情報提供システム1は、衛星から送信されるGPS信号を用いて、建物の屋内にいるユーザに対して位置情報を提供するものであって、建物の屋外に設置されたものであって、衛星から送信されたGPS信号を受信する受信アンテナ10と、建物の屋内において受信アンテナ10と平面座標が一致するように設置されたものであって、受信アンテナ10にて受信されたGPS信号を屋内に送信する送信アンテナ70と、受信アンテナ10と送信アンテナ70とを相互に接続するものであって、受信アンテナ10にて受信されたGPS信号を送信アンテナ70に向けて光通信で伝送する光伝送手段を備える。
(もっと読む)
位置監視装置、位置監視プログラムおよび位置監視方法
【課題】移動端末が独自に位置情報を算出する場合であっても、各携帯端末の近くにいる人や物を正確に判定すること。
【解決手段】一緒に行動しているユーザ同士は、動きの変化が同じになると考えられる。この点に着目し、位置監視装置100は、ユーザの動きが変化した時点での位置座標を算出し、他の位置監視装置から、他のユーザの動きが変化した時点での位置座標を算出する。そして、位置監視装置100は、各位置座標を比較して、各位置監視装置間の距離を算出する。このように、動きの変化によってタイミングを計り、位置座標を算出することで、各位置監視装置間の近くにいる人や物を正確に判定することができる。
(もっと読む)
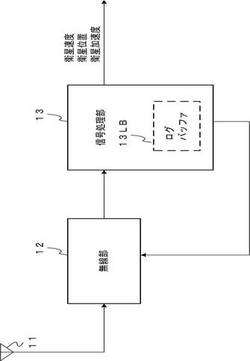
受信機
【課題】
GNSSでは20msec毎にI相とQ相の相関信号の反転が起こり得るので、測位データが未知である場合には、コヒーレント相関は20msecを超えて実施することができなかった。
【解決手段】
基地局GNSS信号受信部が受信したデータから第1の測位データの取得をする基地局データ検出部と、基地局データ検出部からGNSS信号を生成する基地局GNSS信号生成部と、移動局から伝送された該移動局が受信したGNSS信号を受信する移動局GNSS信号受信部と、基地局GNSS信号生成部が生成した生成データと移動局GNSS信号受信部が受信した受信データの相関演算を行うことにより第2の測位データを取得する相関部と、第1の測位データと第2の測位データの差分を計算する誤差検出部とから成り、基地局GNSS信号生成部が第1の測位データを第2の測位データに一致するよう補正することを特徴とする受信機。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して前記自立航法軌跡と前記GPS軌跡との一致度を最も高くするための前記自立航法情報の第1補正量を取得し、当該第1補正量より小さい第2補正量によって前記自立航法情報を補正する。
(もっと読む)
地上デジタル放送再送信システム
【課題】地上デジタル放送信号及びGPS信号の伝送の安定性を向上することができる、地上デジタル放送再送信システムを提供すること。
【解決手段】地上デジタル放送再送信システム1は、建物の屋外に設置されており、放送局から送信された地上デジタル放送信号を受信するDTV受信アンテナ10と、建物の屋外に設置されており、衛星から送信されたGPS信号を受信するGPS受信アンテナ30と、建物の屋内でGPS受信アンテナ30と平面座標が一致するように設置されており、DTV受信アンテナ10で受信された地上デジタル放送信号と、GPS受信アンテナで受信されたGPS信号とを屋内に送信する送信手段と、DTV受信アンテナ10と、GPS受信アンテナ30と、送信手段とを相互に接続し、DTV受信アンテナ10で受信された地上デジタル放送信号と、GPS受信アンテナ30で受信されたGPS信号とを送信手段に向けて光通信で伝送する光伝送手段とを備える。
(もっと読む)
ヒーブ量計測装置
【課題】
従来は、ヒーブ量を計測する場合には、必ず4個以上の測位用衛星の受信が必要であったため、例えば受信が中断し、受信中の測位用衛星が3個以下になった場合に、ヒーブ量計測も中断してしまうという問題があった。
【解決手段】
位置を特定できる3個以上の測位用衛星から送信された電波を受信して、当該電波に重畳されているコードの位相から受信点の位置を求める測位手段と、観測周期における前記電波のキャリア位相量を観測する手段と、前記観測によるキャリア位相量をフィルタしヒーブ量に起因するキャリア位相量であるところのヒーブ位相量を求める手段と、前記受信点の位置と衛星の位置および前記ヒーブ位相量からヒーブ量を算出する手段と、を備えたヒーブ量計測装置とする。
(もっと読む)
無線基地局、サーバ、無線基地局システム、および無線基地局システムの同期方法
【課題】多数のサーバを設置することなく、無線基地局において、GPS衛星からの軌道情報を良好な感度で受信することを可能とする無線基地局、サーバ、無線基地局システム、および無線基地局システムの同期方法を提供する。
【解決手段】GPSモジュール10は、GPS衛星から軌道情報を受信する。軌道情報要求部11は、GPSモジュール10においていずれかの軌道情報を受信できなかった場合に、無線基地局へ受信できなかった軌道情報の送信を要求する。アシストデータ生成部14は、要求に応じて、無線基地局から送信される軌道情報およびGPS衛星から受信した軌道情報とを含むアシストデータを生成する。アシストデータ提供部13は、生成したアシストデータを無線基地局に提供する。
(もっと読む)
タイミング同期装置、タイミング同期方法
【課題】基準タイミング信号に自装置の内部タイミング信号を正確に同期させるタイミング同期装置を提供する。
【解決手段】所定の時間間隔を示す基準タイミング信号と基準タイミング信号に対応する基準時刻を示す基準時刻情報とを取得する取得部と、クロック周波数を有する内部クロック信号を生成するクロック生成部と、内部クロック信号に基づいて、所定の時間間隔を示す内部タイミング信号と内部タイミング信号に対応する時刻を示す内部時刻情報とを生成する時刻情報生成部と、基準タイミング信号と内部タイミング信号、及び、基準時刻情報と内部時刻情報を比較することにより、基準タイミング信号に対する内部タイミング信号の進み又は遅れを検出し、且つ、基準タイミング信号に対する内部タイミング信号の位相の進み量又は遅れ量を検出する検出部と、位相の進み量又は遅れ量に応じてクロック周波数を調整する調整部と、を備えるタイミング同期装置。
(もっと読む)
加速度算出方法、位置算出方法及び加速度算出装置
【課題】移動体の加速度を適切に求めるための新たな手法の提案。
【解決手段】移動体に設置された加速度センサー2が検出したローカル座標系であるBフレームにおける移動体の加速度が、移動体に設置されたジャイロセンサー3の検出結果を用いて、絶対座標系であるNフレームにおける加速度(Nフレーム加速度)に変換される。すなわち、ジャイロセンサー3の検出結果を積分することで移動体の姿勢が算定され、当該算定姿勢を用いた座標変換処理により、Nフレーム加速度が算出される。そして、Nフレーム加速度に内在するバイアス値が、当該加速度を観測値とするカルマンフィルター処理を利用して推定され、当該バイアス値を用いてNフレーム加速度が補正される。
(もっと読む)
作業機械の周囲監視装置
【課題】他の作業エリアまたは他の作業装置の作業員を識別する作業機械の周囲監視装置を提供する。
【解決手段】無線受信機10a、10b、10cにて受信した作業員識別情報に基づいて、情報保持部65に保持されたデータベースを照合し、操作室1f内に搭載された表示装置50に、作業監視領域と共に作業員特定情報および作業エリア情報を表示する。
(もっと読む)
衛星信号の搬送波位相測定値を使用した位置決定
【課題】初期の位置から複数の連続する位置へと移動する移動ユニットの相対的位置を判定する方法及び装置を提供する。
【解決手段】移動ユニットは、複数のナビゲーション衛星から信号を受信し、移動中にそれらの信号の搬送波位相を追跡する。受信された信号のそれぞれについて、搬送波位相増分が複数のエポックにわたって計算される。異常な搬送波位相増分が、さらなる計算を基に判定され排除される。次いで、排除されない搬送波位相増分を使用して、時間エポックのそれぞれの間の座標増分を計算する。排除後の搬送波位相増分の残りの数が、特定のエポックを対象とする閾値よりも少ない場合は、当該特定のエポックの間の座標増分は、以前のエポックからのデータを使用して外挿することができる。他の実施例では、最小2乗法及びカルマン・フィルタリングを使用して、座標増分を計算する。次いで、移動ユニットの位置を複数の時間エポックにわたる座標増分を順次合計し、その初期の位置と相対的に判定することができる。
(もっと読む)
361 - 380 / 2,510
[ Back to top ]