
Fターム[5J062CC07]の内容
Fターム[5J062CC07]に分類される特許
301 - 320 / 2,510
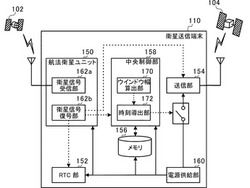
衛星送信端末および衛星送信方法
【課題】SSO衛星との通信時間を確保しつつ、小型軽量化および低消費電力化を図る。
【解決手段】衛星送信端末110は、GPS衛星(航法衛星)102から送信されるGPS信号(衛星信号)を受信する衛星信号受信部162aと、受信されたGPS信号を復号して地方時を導出する衛星信号復号部162bと、降交点通過地方時または昇交点通過地方時と、衛星通過ウインドウ幅とに基づいて、SSO衛星へのデータの送信を開始する時刻である開始時刻と、SSO衛星へのデータの送信を終了する時刻である終了時刻とを導出する時刻導出部172と、電源の供給を受けている間、SSO衛星104にデータを送信する送信部154と、導出された地方時が、開始時刻から終了時刻までに含まれている間、送信部154への電源の供給を行う電源供給部160とを備える。
(もっと読む)
衛星電波受信装置及び衛星電波受信方法

【課題】 消費電力を増加させずに衛星電波の検出時間を短縮することが可能な衛星電波受信装置および衛星電波受信方法を提供する。
【解決手段】 測位用衛星から送信された衛星信号を取得する衛星電波受信装置において、測位用衛星が送信する周波数を含む予め設定された周波数範囲の電波を受信可能な受信手段と、受信手段により受信された電波に基づく受信信号から衛星信号を検出する捕捉手段と、捕捉手段により検出された複数の衛星信号の受信周波数に基づいて、検出された複数の衛星信号の中心周波数を算出する算出手段と、を備え、捕捉手段は、中心周波数を基準として衛星信号の検出を行う。
(もっと読む)
衛星測位システム及び測位信号受信機
【課題】TTFF短縮と測位精度向上とを両立させた測位信号受信機及び衛星測位システムを提供する。
【解決手段】全地球測位システムと、衛星軌道情報を有する測位信号受信装置と、衛星軌道情報を有さない測位信号受信装置と、初期位置算出支援情報を提供する初期位置算出支援情報生成装置と、前記初期位置算出支援情報を送信するQZSとからなる衛星測位システムであって、初期位置算出支援情報生成装置からは、クロック情報と衛星軌道情報とが前記QZSのL1−SAIF信号に重畳されて前記衛星軌道情報を有する測位信号受信装置及び前記衛星軌道情報を有さない測位信号受信装置に送信される。
ことを特徴とする。
(もっと読む)
全地球ナビゲーション衛星システム受信器における帯域スペクトル干渉ビジュアライザ
【課題】全地球ナビゲーション衛星システム受信器における帯域スペクトル干渉ビジュアライザを提供する。
【解決手段】少なくとも1つの割り当てられたGNSS周波数帯内の信号強度データを決定するための装置が提供される。装置は、GNSSアンテナを含む。GNSSアンテナは、割り当てられたGNSS周波数帯内の信号を受信する。装置は、受信回路網をさらに含む。受信回路網は、受信された信号を復調するためのものである。装置は、プロセッサ、およびプロセッサにより実行可能な命令を記憶するためのメモリをさらに含む。命令は、復調された信号に基づいてGNSSに割り当てられた周波数帯内の受信された信号に対する信号強度データを生成するための命令、および復調された信号に基づいて関心のある地点に対する位置を決定するための命令を含む。
(もっと読む)
電子機器及びプログラム
【課題】位置情報や移動速度を取得できない状況であっても、低コストかつ的確に目的物の設置位置に関する情報の報知を行なう。
【解決手段】データベースにはトンネル内速度測定装置eと装置eの位置へ至るトンネル内の道路上位置に設けた誘導点b,c,dの位置情報を記憶している。誘導点bはトンネル進入前のGPS受信器によって測位可能な位置から1km以内の位置に設定し、各誘導点間の距離も1km以内に設定している。トンネル進入点aで測位不能になる直前の現在位置から誘導点bに向けて測位不能になる直前の速度で進行しているものとして現在位置を更新していき、各誘導点位置に到達したら次の誘導点に向けて同様に現在位置を更新する。次の誘導点がない場合にはトンネル内速度測定装置へ向けて同様に現在位置を更新する。トンネル内速度測定装置eとの現在位置の関係が2km、1km、500mになった際にそれぞれ接近警報を発する。
(もっと読む)
車両用軌跡推定装置
【課題】GPS受信装置がGPS衛星からの信号に基づいて算出する情報をカルマンフィルタの観測量に用いることで、自立センサの誤差を推定し、推定したセンサ誤差を補正する技術において、カルマンフィルタで用いるGPS測位結果の精度の劣化を全体として抑える。
【解決手段】カルマンフィルタは、観測量として、使用対象の複数のGPS衛星毎に、当該GPS衛星の擬似距離およびドップラー周波数について、その量をGPS衛星からの信号に基づいて算出した値とその量を推測航法で算出した値との乖離量を採用するタイトカップリング型である。当該車両用軌跡推定装置は、当該カルマンフィルタにおける上記乖離量についてのカイ自乗値と所定の閾値とを比較し(S451)、当該カイ自乗値が当該所定の閾値以上である場合、使用対象の複数のGPS衛星毎うち精度の低い一部を選び、選んだ当該一部を使用対象から除外する(S452)。
(もっと読む)
衛星信号受信装置
【課題】 電源に無理な負荷をかけずに安定且つ高速な受信処理を行うことができる衛星信号受信装置を提供する。
【解決手段】 測位用衛星から送信された衛星信号を取得する衛星信号受信装置1において、測位用衛星が送信する周波数帯の電波を受信する受信手段12と、受信手段12が受信した電波に基づく所定の期間の受信データを記憶する記憶手段13と、記憶手段13に記憶された受信データから衛星信号を検出する検出手段16と、記憶手段13から検出手段16へのデータ出力処理速度、及び、記憶手段13から出力される受信データに基づく検出手段16による検出処理速度を制御し、データ出力処理速度と検出処理速度とを同期させて予め定められた処理速度から低減可能に構成されているクロック制御手段19、20と、を備えている。
(もっと読む)
データベース管理装置及びデータベース管理方法
【課題】移動可能な装置からの信号の利用を抑制して、通信端末による高い精度の測位を実現する。
【解決手段】測位支援システム10を構成するSUPLサーバ20の測位用DB23に格納され、アクセスポイントE1,E2が設けられた通信エリアを示す設置エリア情報と、アクセスポイントトE1,E2から発信された電波を受信した通信端末60の位置を示す通信エリア情報を含んで通信端末60から発信される複数の電波情報と、に基づいて、SUPLサーバ20の制御部22において、アクセスポイントトE1,E2が移動しているか否かが判断される。このため、アクセスポイントトE1,E2が移動している場合には、このアクセスポイントからの信号の使用を抑制することができる。したがって、移動可能なアクセスポイントからの電波を用いることなく通信端末60による高い精度の測位を実現することができる。
(もっと読む)
ナビゲーション信号送信装置および位置情報提供装置
【課題】屋内測位送信機からの測位信号による測位時間の短縮を実現することが可能なナビゲーション信号送信装置および位置情報提供装置を提供する。
【解決手段】情報提供サーバ1230は、携帯電話機1200から送られてくる送信機1210の送信機IDを認識すると、送信機IDに関連付けられているデータベースを参照して、そのIDに関連するSVG地図情報(地図を表示する情報と送信機IDと送信機の当該地図上の位置との対応関係の情報とを含む)を読み出す。情報提供サーバ1230が、SVG地図情報のデータを基地局1240に対して送信すると、基地局1240は、そのSVG地図情報のデータを無線発信する。携帯電話1200は、そのデータの着信を検知すると、携帯電話1200の使用者による閲覧操作に従って、そのデータから、送信機1210の位置を取得することができる。
(もっと読む)
測位装置、測位方法、プログラム及び撮像装置
【課題】測位手段による測位の不安定な状態における位置情報の精度の向上を図る。
【解決手段】CPU10は、撮影位置において自律航法測位による継続的計測及びGPS測位による所定タイミング毎の測定を開始する。そして、CPU10は、GPS測位によって得られた少なくとも2以上の位置データに基づいて算出される移動ベクトルと、自律航法測位によりGPS測位によって得られた位置データとそれぞれ同時期に得られた2以上の地点における移動ベクトルとの差が所定範囲以内である場合に、少なくとも2以上の位置データのうちの何れかに基づいて位置情報取得地点を定める。そして、CPU10は、位置情報取得地点における位置データと自律航法測位により継続的に計測されてきた位置データとに基づいて撮影位置の位置データを求める。
(もっと読む)
管理装置、管理方法、及び管理プログラム
【課題】本願が解決しようとする課題は、発振周波数の誤差テーブルを高精度にすることにある。
【解決手段】本願は、発振器の温度を測定し、GPS(Global Positioning System)による測位を行った後に、前記発振器の発振周波数の誤差を測定して、前記測定した温度と誤差とを対応付けた誤差テーブルを作成して記憶させることを特徴とする。
(もっと読む)
目標物探知システム、探知方法、及び探知情報処理プログラム
【課題】レーダ,ソナー,又はライダーから成る送受信機を備えた目標物探索システムにあって、S/N比が低く反射信号が雑音に埋設されそうな環境下にあっても、目標物を有効に捕捉することを可能とした目標物探知システムを提供すること。
【解決手段】方位設定が可能で異なる設置位置にそれぞれ配置された目標物探索用の少なくとも二個の送受信機1,2と、この各送受信機1,2により探索された目標物Mの方位にかかる反射情報に基づいて当該目標物Mの位置を特定する位置算出手段12を備えた主制御装置10とを設け、前記位置算出手段12が、前記二個の送受信機1,2によって得られた目標物Mの方位にかかる情報を、前記各送受信機1,2の位置情報を基準として重ね合わせ処理することにより前記目標物Mの位置を特定する機能を備えていることを特徴とする。
(もっと読む)
携帯端末及びプログラム
【課題】測位を繰り返す事前設定が携帯端末になされていない場合であっても、乗り過ごし防止機能を作動させる。
【解決手段】携帯端末は、GPS測位方式に従って自端末の位置を計測する測位部を有し、自端末が高速移動中であることを検知した場合に(S1;YES)、測位部に繰り返し測位させる自動測位を開始する(S2)。携帯端末は、自動測位が可能と判定した場合(S3;YES)、GPS測位方式に従う測位結果に基づいて、列車に自端末のユーザが乗車中であるか否かを判定する(S5)。携帯端末は、乗車中であると判定した場合(S5;YES)、測位部が計測した位置とユーザが降車予定駅とに基づいて、降車予定駅に接近したことをユーザに報知する(S6〜S9)。携帯端末は、高速移動という列車に乗車中に生じる事象の検知を契機に自動測位を開始するので、自動測位に関する事前設定に関わらず、乗り過ごし防止機能を作動させる。
(もっと読む)
信頼度の高いGPS測位信号のみを用いた衛星航法補強システム
【課題】 GPS衛星からの信号の信頼性を適正に判断できるようにする。
【解決手段】 衛星航法補強システム2にGPS衛星4からの信号に基づき擬似距離が測定された際の搬送波電力対雑音電力密度比(C/No)の値が適正であるか否かを判定するためのモニタ閾値を算出する閾値算出部32と、C/No値とモニタ閾値とを比較して、擬似距離が適正な精度を持つか否かを判定する擬似距離判定部33と、を設ける。
(もっと読む)
衛星信号のコード追尾装置
【課題】BOC変調された衛星信号のコード追尾をより正確に行う。
【解決手段】BOCコード発生器21で生成されたレプリカBOCコードと受信信号との相関処理を行なってBOC相関波形を生成するとともに、E−L波形を生成するBOC相関器22と、PRNコード発生器31で生成されたレプリカPRNコードと受信信号との相関処理を行なってBOC−PRN相関波形を生成するPRN相関器32と、BOC相関器22で生成されたE−L波形を正規化して、E−L波形に基づいたコードの同期ずれに対する補正量を算出するBOC用ディスクリミネータ23と、PRN相関器32で生成されたBOC−PRN相関波形を正規化して、正規化したBOC−PRN相関波形に基づいたコードの同期ずれに対する補正量を算出する第2のディスクリミネータ33と、各ディスクリミネータ23、33で算出された補正量に基づいて、発生器21、31のコード位相を制御するコードNCO6と、を備える。
(もっと読む)
衛星航法システム受信機、その制御方法、電子デバイス、及びその制御方法
【課題】衛星航法システム受信機の時計の時刻を衛星航法システムに頼らずに設定する技術を提供する。
【解決手段】電子デバイスと通信可能であり、電源から供給される電力で動作する時計を備える衛星航法システム受信機であって、衛星航法システムから第1時刻情報を受信する第1受信手段と、前記時計の時刻を前記第1時刻情報が示す時刻に設定する第1設定手段と、前記時計の動作に必要な電力が前記時計に供給されない電力不足状態の発生を検知する検知手段と、前記電力不足状態の発生が検知されたか否かを示す検知情報を記憶する記憶手段と、前記検知情報を前記電子デバイスへ送信する送信手段と、前記検知情報の送信に応えて送信された前記電子デバイスから第2時刻情報を受信する第2受信手段と、前記時計の時刻を前記第2時刻情報が示す時刻に設定する第2設定手段と、を備えることを特徴とする衛星航法システム受信機を提供する。
(もっと読む)
測位装置、測位方法、および、プログラム
【課題】 測定精度の高い位置データおよび軌跡データを取得することのできる測位装置、測位方法、および、プログラムを提供する。
【解決手段】 現在位置を測定する絶対位置測定手段と、移動方向及び移動量を計測する移動計測手段と、移動計測手段により計測された移動情報を当該移動の始点の位置情報に積算していくことで現在位置を算出する自律測位手段と、絶対位置測定手段により求められた現在位置の精度指標と自律測位手段により求められた現在位置の精度指標とを比較して、より高精度な現在位置データを選択する位置選択手段とを備え、絶対位置測定手段により求められた現在位置データが位置選択手段によって選択された場合には、選択された現在位置を基準点として設定し、自律測位手段により求められた現在位置の精度指標は、基準点から累積的に精度が低下するように設定される。
(もっと読む)
自己供給型未来エフェメリスおよびクロック予測を備えた衛星航法受信機
【課題】ナビゲーション・システム衛星用のエフェメリスを含んだ航法メッセージを復調することが可能な完全自律型の衛星航法受信機を提供する。
【解決手段】特定の衛星ビークルに作用する加速度の力モデルを含み、受信機専用である。各SV(衛星ビークル)のエフェメリスについての単一の観測は、その対応する力モデルに各SVの軌道位置を積分することによって、今後の何日かを入力され伝搬される。それぞれのSVからの航法メッセージを直ちに得て復調することができない場合、完全自律型の衛星航法受信機は、その後、代替物として使用することができる拡張エフェメリス予測が利用可能となる。
(もっと読む)
測位装置
【課題】比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる測位装置を提供する。
【解決手段】測位装置20は、受信信号を解析する受信信号解析部21と、受信時刻情報を受信信号解析部21に提供する受信機時計22と、利用者位置、利用者速度及び受信機時刻を推定するカルマンフィルタ40と、を備え、カルマンフィルタ40は、状態予測を行う状態予測処理手段41と、状態推定を行う状態推定処理部42と、受信機時計22の異常変化を検出する時計異常変化検出部43と、を備え、状態予測処理手段41は、状態推定処理部42から得る1エポック前の状態変数ベクトルに基づいて現エポックの状態変数ベクトルを予測する状態予測処理部41aと、時計異常変化検出部43の検出結果に基づいて状態予測値を修正する状態予測値修正部41bと、を備える。
(もっと読む)
測位装置、測位方法、及び、プログラム
【課題】 電車による移動を含む移動経路の軌跡を精度良く取得することのできる低消費電力の測位装置、測位方法、プログラムを提供する。
【解決手段】
現在位置を測定する絶対位置測定手段(15)と、絶対位置測定手段の動作タイミングを制御して非連続的に現在位置を測定させる測位制御手段(10)と、動作の計測を行う移動計測手段(15、16)と、移動計測手段の計測結果に基づいて動作種別の判定を行う動作内容判別手段(21)と、鉄道路線図の情報を記憶する地図データ記憶手段(13a)と、絶対位置測定手段により測定された位置情報、及び、鉄道路線図の情報に基づいて、動作内容判別手段により列車移動状態であると判定された期間の移動経路を判別する移動経路判別手段(10)と、を備える。
(もっと読む)
301 - 320 / 2,510
[ Back to top ]