
Fターム[5J062CC07]の内容
Fターム[5J062CC07]に分類される特許
281 - 300 / 2,510
測位装置、測位装置の調整方法およびプログラム
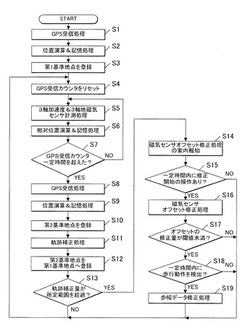
【課題】 較正処理の実行時期を判断するためだけに多大な負荷を要することなく、自律航法の測位に必要な較正処理を適切な時期に行うことのできる測位装置、測位装置の調整方法およびプログラムを提供する。
【解決手段】 測位衛星から信号を受信して測位を行う第1測位手段(S1,S2,S8,S9)と、相対的な移動方向および移動量の計測によって測位を行う第2測位手段(S5,S6)と、第2測位手段の連続的な測位により任意の移動過程の位置データが取得され、その後に第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記移動過程の各地点の位置データを補正する補正手段(S11)と、第2測位手段の較正処理を行う較正手段(S14〜S19)と、補正手段の補正量に基づいて較正処理の実行時期を制御する較正時期制御手段(S13)とを備えている。
(もっと読む)
衛星信号判定装置及びプログラム

【課題】GPS受信機が内部に設けられていても、測位衛星の遮蔽状態を精度良く判定することができるようにする。
【解決手段】車両方向推定部30によって、各GPS情報と、検出された車速及びヨーレートとに基づいて、車両の進行方向の絶対方向を推定する。衛星方向推定部32によって、各GPS情報に基づいて、各測位衛星が存在する絶対方向を推定する。衛星方向推定部32によって、車両の進行方向の絶対方向、及び各測位衛星の絶対方向に基づいて、車両の進行方向に対する各測位衛星の相対方向を算出する。遮蔽判定部38によって、各測位衛星について、車両の進行方向に対する相対的な立体方向の範囲を分割した複数の分割範囲のうち、算出された相対方向が属する分割範囲に対して予め定められたS/Nの閾値を用いて、当該測位衛星の衛星信号のS/Nが、閾値以上であるか否かを判定して、当該測位衛星の遮蔽状態を判定する。
(もっと読む)
スペクトル拡散信号用受信機
【課題】新たなハードウェアの追加することなく、マルチパス波の影響を受けたスペクトル拡散信号の使用を制限することができるスペクトル拡散信号用受信機を提供する。
【解決手段】各相関器から出力される相関値に基づいて相関値振幅を求め、その相関値振幅を接続した相関関数の傾斜P(t)−E(t)、P(t)−L(t)のばらつきを求め、そのばらつきが所定の閾値以上であった場合は、追跡中のGPS衛星からの受信信号を使用しないようにした。
(もっと読む)
SUPLプラットフォームを応用した小型基地局の測位方法及びそのシステム
【課題】従来のフェムトセル基地局の初期位置算出時間が長くなりすぎたり、受信信号の不良により、測位不能となったりする問題点を解決するSUPLプラットフォームを応用した小型基地局の測位方法及びそのシステムを提供する。
【解決手段】SUPLプラットフォームを応用した小型基地局の測位システム1は、複数の移動通信ネットワーク基地局13、SUPLプラットフォーム12、測位ユーザプレーン14及び小型基地局11を備える。SUPLプラットフォーム12には、複数の移動通信ネットワーク基地局13の位置情報を取得するために用いるSUPL位置センター122と、通信を構築するために用いるSUPL測位センター121とが配置される。測位ユーザプレーン14は、SUPLプラットフォーム12に接続される。小型基地局11には、SUPLプラットフォーム12と通信を構築するために用いるSUPLプログラムが設けられる。
(もっと読む)
受信信号信頼度判定方法、コード位相誤差算出方法及び受信信号信頼度判定装置
【課題】衛星信号を受信した受信信号の善し悪しを判定するための新たな仕組みの提案。
【解決手段】GPS衛星信号を受信した受信信号とレプリカコードとの相関演算を行う。そして、相関演算で求められたピーク位相におけるピーク相関値(第1の相関値)と、ピーク位相から所定位相遅れた位相における相関値(第2の相関値)とを用いて、マルチパス信号に含まれる間接波信号の直接波信号に対する遅延距離の指標値であるΔPL値を算出する。そして、所定の信頼度判定用閾値に対するΔPL値の高低を判定基準として、受信信号の信頼度を判定する。この際、信頼度判定用閾値を予め定められた衛星グループに応じて変更する。
(もっと読む)
無線基地局、および無線基地局システムにおけるアシスト方法
【課題】トラフィックを必要最小限に抑えつつ、他局とアシストデータをやりとりすることができる無線基地局および無線基地局システムにおけるアシスト方法を提供する。
【解決手段】GPSモジュール150は、GPS衛星から航法メッセージを受信し、自局で受信した所定個数のエフェメリスに基づいて、基準時刻信号を生成する。未取得衛星特定部26は、現在時刻において、エフェメリスが受信可能なGPS衛星のうち、エフェメリスを受信していないGPS衛星を未取得衛星として特定する。問合せ可能基地局特定部28は、アルマナックと、他の無線基地局の位置情報に基づいて、未取得衛星からのエフェメリスが受信可能な他の無線基地局を特定する。GPSモジュール150は、特定した無線基地局から送信されてくるエフェメリスをアシストデータとして用いて、未取得衛星からのエフェメリスを受信する。
(もっと読む)
移動体用測位装置及びカーナビゲーション装置
【課題】測位精度を維持しながら省電力化が可能な移動体用測位装置を提供する。
【解決手段】GPS受信器10で、GPS衛星から送信される信号を受信し、受信した信号に基づいて車両の現在位置を検出する。制御部40では、車速センサ20により検出した車両の走行速度と方位センサ30で検出した車両の方位に基づいて、車両の現在位置を推測する。推測した車両の現在位置をGPS受信器10により検出した車両の現在位置に基づいて補正した後、GPS受信器10の電源をオフし、その時点から、車速センサ20の車速検出誤差及び方位センサ30の方位検出誤差のうち少なくとも1つの誤差の時間経過に伴う累積値に基づき、車両の推測現在位置の誤差を算出し、誤差が予め設定した許容範囲を超えたときに、GPS受信器10の電源をオンして、車両の推測現在位置をGPS受信器10により検出した車両の現在位置に基づいて補正するという動作を繰り返す。
(もっと読む)
衛星信号受信機
【課題】信号レベルが極めて弱い衛星信号を効果的に再捕捉する。
【解決手段】周波数予測演算器23で演算された最も可能性が高い予測周波数Fp0を用いて、衛星信号発生器4で生成した複数のコード位相候補C1、C2、・・・Ckに対して、20ms相関演算器51およびM回NC加算器52で高感度な相関を行い、複数のコード位相候補C1、C2、・・・Ckを同時に並行サーチ可能とする。
(もっと読む)
衛星状態情報を衛星測位システムに使用するための方法および装置
【課題】衛星位置決めシステムの位置の計算に関する相互相関の影響を除去する。
【解決手段】相互相関結果を用いることを回避する、またはそのような結果を検出する試みにおいて衛星の健全に関する情報を使用する。この方法は、視野内のSPS衛星からSPS信号を受信し、健全な衛星であると示された第1SPS衛星に対応して、第1測定値が、移動SPS受信器の位置を解くために使用される測定値のセットから除去されるか否かを決定する。この決定は第1測定値がSPS信号から派生したものかどうかを試験する。
(もっと読む)
測位データ管理サーバ及び測位データ管理方法
【課題】測位システムの不具合の原因究明及び不具合解消のための対応を迅速に行う。
【解決手段】本発明の測位データ管理サーバは、ネットワークに接続される通信装置と、前記通信装置に接続される処理装置と、前記処理装置に接続される記憶装置と、を備え、複数の領域に対応する複数のノードと、隣接する前記領域間を接続する通行可能な経路に各々が対応する複数のリンクと、の接続関係を示すネットワークデータを保持し、端末装置が位置する領域を示す位置情報と、前記位置情報が取得された時刻と、の複数の組を含む測位データを保持し、前記ネットワークデータと、前記測位データとを比較することによって、前記保持された測位データの連続性を判定し、前記連続性の判定結果に基づいて、測位の不具合が発生した領域を特定する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 歩行体の移動に対する追従性が良好で、且つ、高精度な測位を行うことのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 歩行体に保持されて歩行運動と方位に関する検出を行う自律航法用センサと、自律航法用センサの出力と歩幅データとに基づいて歩行体の移動量を算出する移動量算出手段と、前記自律航法用センサの出力に基づいて一歩ごとの移動方向を算出する移動方向算出手段(ステップS1)とを備え、移動量算出手段は、自律航法用センサの出力に基づき左右の足の踏込み方向の違いに起因する移動方向の一歩毎のブレ角度(θ)を算出するブレ角度算出手段(S2〜S4)を有し、歩幅データの値をブレ角度(θ)が大きくなるに従って歩幅が大きくなるように補正して一歩ごとの移動量として算出するようにした(S5)。
(もっと読む)
測位システム、測位方法、及び測位プログラム
【課題】第2の測位方式による測位結果の実測値をもとに、第1の測位方式による測定位置における第2の測位方式による測位の可否を判定する測位システムにおいて、第2の測位方式による測位が不可と推定されたことにより、その測定位置での第2の測位方式による測位が行われないままになることを防止する。
【解決手段】測位制御部210は、第1の測位方式による測位で取得された測位要否判定対象である測定位置と測位情報記憶部220に記憶された測位情報とをもとに、第2の測位方式による測位が成功する確率と当該確率の推定精度とを算出し、第2の測位方式による測位が成功する確率の推定精度が所定の精度以下の場合、第2の測位方式による測位を行い、当該測位要否判定対象である測定位置と当該第2の測位方式による測位可否とを設定した測位情報を測位情報記憶部220に保存する。
(もっと読む)
運転評価装置
【課題】GPS受信状況によって車両挙動の推定精度が低下する場合にあっても、適切な方法で運転評価値を算出して表示する。
【解決手段】運転安定度評価装置は、GPS受信信号を取得し(S101)、GPS受信信号に受信時刻を設定し(S102)、車両の速度を算出し(S103)、車両の現在位置と受信時刻と車両の速度に基づいて車両の挙動の推定値を算出し(S104)、受信時刻から求められる車両の現在位置の更新時間に基づいて、挙動推定値の精度を算出する(S105)。そして、この挙動の推定値と挙動推定値の精度に基づいて、走行に関する評価値を算出し(S107)、その評価値を表示する(S108)。
(もっと読む)
低デューティーサイクル・デバイス・プロトコル
【課題】オペレーションの遠隔監視としては、オペレーション状態情報を監視して、遠隔に位置する情報処理装置にオペレーション状態情報を送信する、低電力の及び/又はバッテリー駆動の無線通信デバイスの使用を挙げることができる。そのような、待機状態になり得る低デューティーサイクル・デバイスであっても、センターから送信される情報を受信できるようにする。
【解決手段】無線通信ネットワークを介した低デューティーサイクル・デバイスと他のデバイスとの間の通信の確立のためのシステム及び方法に関する。オペレーション状態は、ショートメッセージとして、無線周波数信号によって送信される。一つの特定の実装において、低デューティーサイクル・デバイスは、メッセージの伝送に同期して、待機状態から起動する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 自律航法測位と間欠的なGPS測位とを併用して移動経路中の各地点の位置データを取得していく場合に、間欠的にGPS測位を実行するタイミングを適切に決定することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 GPS測位手段に間欠的に測位を行わせる(S11〜S14)一方、この間欠的な測位の間に自律航法測位手段に連続的に測位を行わせて(S5,S6)移動経路に沿った位置情報を取得していく測位制御手段を備え、前記測位制御手段は、基準地点と測位地点との二点間距離を算出する距離算出手段(S8)と、距離算出手段により算出された二点間距離に基づきGPS測位手段の間欠的な測位の実行タイミングを制御する測位タイミング制御手段(S10)とを有する。
(もっと読む)
ビット変化判定方法及びビット変化判定装置
【課題】航法メッセージデータのビット値の変化の有無を判定するための手法の提案。
【解決手段】GPS衛星信号を受信した受信信号とレプリカCAコードとの相関演算を行う。そして、連続するN個(N≧1)の単位期間である第1の増感期間に含まれるビット遷移タイミングにおけるビット値の変化(遷移)の有無を判定する第1の事前判定、及び、第1の増感期間に隣接する連続するM個(M>1)の単位期間である第2の増感期間に含まれるビット遷移タイミングにおけるビット値の変化(遷移)の有無を判定する第2の事前判定としての予備判定を行う。その予備判定の結果に基づいて、単位期間毎の予備合算値を所定の増感時間分合算する。そして、第1及び第2の増感期間について算出した合算値を用いてIQ内積値を計算し、当該IQ内積値に基づいて、第1の増感期間と第2の増感期間との境目における航法メッセージデータのビット値の変化の有無を判定する。
(もっと読む)
位置推定方法及び無線基地局
【課題】ホーム基地局の現時点での設置位置を把握可能とする位置推定方法を提供する。
【解決手段】位置推定方法は、自局のカバレッジ内にホーム基地局HeNBが設置された無線基地局eNBが、所定のトリガに応じて、Immediate MDTを指示するためのMDT Configurationメッセージを無線端末UEに送信するステップS104と、ホーム基地局HeNBのカバレッジ内の無線端末UEが、MDT Configurationメッセージに応じて、ホーム基地局HeNBに対する測定を行うステップS105と、ホーム基地局HeNBのカバレッジ内の無線端末UEが、測定結果と、測定を行った際の位置を示す位置情報とを含むMeasurement Reportメッセージを無線基地局eNBに送信するステップS106と、無線基地局eNBの上位装置が、Measurement Reportメッセージに含まれる位置情報に応じて、ホーム基地局HeNBの設置位置を推定するステップS108とを備える。
(もっと読む)
衛星送信端末および衛星送信方法
【課題】SSO衛星との通信時間を確保しつつ、小型軽量化および低消費電力化を図る。
【解決手段】衛星送信端末110は、GPS衛星(航法衛星)102から送信されるGPS信号(衛星信号)を受信する衛星信号受信部162aと、受信されたGPS信号を復号して地方時を導出する衛星信号復号部162bと、降交点通過地方時または昇交点通過地方時と、衛星通過ウインドウ幅とに基づいて、SSO衛星へのデータの送信を開始する時刻である開始時刻と、SSO衛星へのデータの送信を終了する時刻である終了時刻とを導出する時刻導出部172と、電源の供給を受けている間、SSO衛星104にデータを送信する送信部154と、導出された地方時が、開始時刻から終了時刻までに含まれている間、送信部154への電源の供給を行う電源供給部160とを備える。
(もっと読む)
衛星電波受信装置及び衛星電波受信方法
【課題】 消費電力を増加させずに衛星電波の検出時間を短縮することが可能な衛星電波受信装置および衛星電波受信方法を提供する。
【解決手段】 測位用衛星から送信された衛星信号を取得する衛星電波受信装置において、測位用衛星が送信する周波数を含む予め設定された周波数範囲の電波を受信可能な受信手段と、受信手段により受信された電波に基づく受信信号から衛星信号を検出する捕捉手段と、捕捉手段により検出された複数の衛星信号の受信周波数に基づいて、検出された複数の衛星信号の中心周波数を算出する算出手段と、を備え、捕捉手段は、中心周波数を基準として衛星信号の検出を行う。
(もっと読む)
衛星測位システム及び測位信号受信機
【課題】TTFF短縮と測位精度向上とを両立させた測位信号受信機及び衛星測位システムを提供する。
【解決手段】全地球測位システムと、衛星軌道情報を有する測位信号受信装置と、衛星軌道情報を有さない測位信号受信装置と、初期位置算出支援情報を提供する初期位置算出支援情報生成装置と、前記初期位置算出支援情報を送信するQZSとからなる衛星測位システムであって、初期位置算出支援情報生成装置からは、クロック情報と衛星軌道情報とが前記QZSのL1−SAIF信号に重畳されて前記衛星軌道情報を有する測位信号受信装置及び前記衛星軌道情報を有さない測位信号受信装置に送信される。
ことを特徴とする。
(もっと読む)
281 - 300 / 2,510
[ Back to top ]