
Fターム[5J062EE05]の内容
Fターム[5J062EE05]に分類される特許
121 - 140 / 359
衛星信号受信装置、計時装置及び衛星信号受信方法

【課題】消費電力を低減することができる衛星信号受信装置、計時装置及び衛星信号受信方法を提供すること。
【解決手段】位置情報衛星から送信された衛星信号を受信し、衛星信号から位置情報を生成する受信演算処理を行う受信演算部を含む衛星信号受信装置であって、衛星信号は、位置情報衛星の詳細軌道情報を含む詳細軌道情報期間と、位置情報衛星の概略軌道情報を含む概略軌道情報期間とを少なくとも含み、受信演算部は、詳細軌道情報期間には受信演算処理を行い、概略軌道情報期間を受信動作休止期間とし、受信動作休止期間には前記受信演算処理の少なくとも一部を休止する。
(もっと読む)
電子機器及び電子機器の制御方法

【課題】電池の状態に応じて適切な制御が可能な電子機器及び電子機器の制御方法を提供すること。
【解決手段】電池24と、電池24から電力の供給を受けて駆動し、衛星信号を受信し、受信した衛星信号から衛星情報を取得する演算処理を行うGPS装置50と、電池24の出力電圧を検出する電圧検出装置52と、電池24に対して、GPS装置50よりも軽い負荷を与える負荷部54と、受信演算部50、電圧検出部52及び負荷部54の動作を制御する制御部40とを含み、制御部40は、電池部24から受信演算部50への電力供給に先立って負荷装置54を動作させ、負荷装置54の動作中における電池24の出力電圧を電圧検出装置52により検出する第1の電圧検出処理を行い、検出された電池24の出力電圧に基づいて、負荷装置54の動作後におけるGPS装置50の動作を制御する。
(もっと読む)
電子時計、電子時計の時差修正方法及び時差修正プログラム
【課題】消費電力を最適化して必要最低限の消費電力で、位置情報衛星から送信される衛星信号に基づいて時差修正を行う電子時計、電子時計の時差修正方法及び時差修正プログラムを提供すること。
【解決手段】GPS装置70は、捕捉した位置情報衛星のうち選択した所定数の位置情報衛星から受信した衛星信号により取得した衛星情報に基づく測位計算を行い位置情報を生成する。ベースバンド部60は、位置情報に基づいて想定位置領域を算出し、フラッシュメモリ66に記憶された時差情報に基づいて想定位置領域が時差境界を含むか否かを判定する。また、制御部40は、想定位置領域が時差境界を含まないと判定された場合には、想定位置領域の時差に基づいて内部時刻情報を修正し、GPS装置70は受信動作を終了する。想定位置領域が時差境界を含むと判定された場合には、所定数の位置情報衛星を選択し直して測位計算を継続する。
(もっと読む)
測位システム
【課題】複数の基地局12の位置が分からない場合や、基地局12どうしの時計の未知の時間ずれがある場合であっても、移動局10の位置を精度よく算出できる移動局測位システムを提供する。
【解決手段】測位部62により、位置情報が既知であり、複数の基地局12との間で電波の送受信が可能な複数の基準局11の位置情報と、複数の基準局11と複数の基地局12との間での電波の送受信における電波の受信結果である受信時刻に基づいて複数の基地局12の有する時計40の時間ずれおよび位置が算出され、さらに測位部62により、算出された複数の基地局12の有する時計40の時間ずれ情報および位置情報と、移動局10と複数の基地局12との間での電波の送受信における電波の受信結果である受信時刻とに基づいて移動局10の位置が算出される。
(もっと読む)
移動局測位システム
【課題】基地局の時計に時間ずれやクロック速度の差が存在し、機器に固有の送信遅延時間および受信遅延時間が存在する場合においても、移動局の位置の算出を精度よく実行できる移動局測位システムを提供する。
【解決手段】各普通基地局12と基準基地局11とのクロック速度比と、各普通基地局12の時計と基準基地局11の時計との時計ずれと、基準基地局11における送信遅延時間および受信遅延時間とに基づいて測位信号の受信時刻を基準基地局11の有する時計に基づいた時刻に補正する受信時刻補正部(66、68、70)と、補正された受信時刻と、基準基地局11における測位信号の受信時刻と、普通基地局12および基準基地局11の位置情報とに基づいて移動局の位置を算出する測位部72とを含み、移動局10および基準基地局11は、移動局10による測位信号の送信と基準基地局による時計合わせ信号の送信との一方に応答して他方を実行する。
(もっと読む)
長期予測軌道データの信頼性判定方法、測位方法、測位装置及び測位システム
【課題】長期予測エフェメリスの信頼性を判定するための手法を提案すること。
【解決手段】測位システム1において、携帯型電話機4は、サーバシステム3から受信した長期予測エフェメリスデータを用いて、測位演算に必要な数以上のGPS衛星SVを組合せた複数の衛星組合せに基づいて測位演算を行う。そして、衛星組合せそれぞれに含まれるGPS衛星SVの異同と、衛星組合せそれぞれについて行った測位演算結果の差とに基づいて、長期予測エフェメリスデータに含まれる各GPS衛星SVそれぞれの予測軌道の信頼性を判定する。
(もっと読む)
GNSS衛星による位置測定方法と装置
【課題】位置計算を航行メッセージの読み取りなしで、そして、ネットワークからのアシスト情報もなしで計算可能とする。
【解決手段】位置計算はコードと周波数の観測値とメモリーに保存される予測エフェメリスデータを利用して行われる。コードと周波数の観測値と予測値の差にもとづいて計算された損失関数が位置計算に使われる。位置計算は全地球衛星航法システム信号の1コード周期の利用で可能である。位置計算装置はフロントエンドと航行ユニットから構成される。フロントエンドユニットと航行ユニットは分離されている。デジタル化された中間周波数データはフロントエンド・ユニットから航行ユニットへ直接かデータ・リンク経由で通信可能であり、後の利用のためにメモリーに保存することも可能である。
(もっと読む)
時間基準システム
全地球的航法衛星群によって生成された信号から時間基準を生成する時間基準システムは、複数の衛星から符号変調信号を受信し、かつ、ダウン・コンバートする衛星信号受信機と、各衛星の不完全な疑似距離の測定値を含む信号を提供するために、ダウン・コンバートされた信号をトラッキング及び復号化する相関器とを有する。システムのデータ処理部は、外部情報源から補助データを受信し、受信した衛星信号が搬送する低周波データ・ビット・ストリームのビット・エッジを識別するデータ・ビット同期を実行し、凡その時間基準を提供するために、予備的な位置−速度−時間の解を実行し、時間の曖昧性を解消するために、データ・ストリーム中の事前に選択したデータ列の自己相関を実行し、これにより、微弱受信信号条件下での正確な時間基準信号を計算する。事前に選択したデータ列は、データ・ストリームによって構成されるGPSの航法メッセージ中の反復データ・プリアンブルとすることができる。 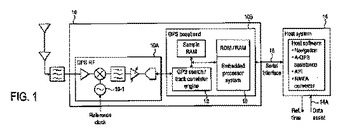 (もっと読む)
(もっと読む)
パラメータ値算出方法、長期予測軌道データの提供方法、情報提供装置及び測位システム
【課題】長期予測エフェメリスを生成するための新たな手法を提案すること。
【解決手段】測位システム1において、サーバシステム3は、衛星軌道の所定の有効期間を区分する予測対象期間の長さを、将来になるほど長くなるように可変に設定する。より具体的には、外部システム2から取得した衛星精密暦に含まれる過去の予測位置に対応するGPS衛星SVの実績位置と、外部システム2から取得した衛星予測暦に含まれる過去の予測位置との差で表される予測誤差が大きいほど、予測対象期間の長さを長く設定する。そして、設定した複数の予測対象期間それぞれについて、衛星予測暦に基づいて、ケプラーの楕円軌道モデルに従ったGPS衛星SVの予測軌道を求め、衛星軌道パラメータの値を算出する。そして、算出した衛星軌道パラメータの値を予測対象期間毎に纏めた長期予測エフェメリスデータを生成して、携帯型電話機4に提供する。
(もっと読む)
電子時計
【課題】受信状況に応じて消費電力を最適化しながら位置情報衛星から送信される衛星信号に基づいて時刻修正を行う電子時計を提供すること。
【解決手段】GPS付き腕時計1は、GPS装置70、制御部40、文字板11、指針12を含む。GPS装置70は、GPS衛星から送信された衛星信号を受信し、受信した衛星信号に基づいて、捕捉時間内にGPS衛星を捕捉し、捕捉したGPS衛星から送信された衛星信号から衛星情報を取得し、衛星情報に基づいて時刻修正情報を生成する。制御部40は、時刻修正情報に基づいて内部時刻情報を修正する。文字板11及び指針12は内部時刻情報を表示する。GPS装置70(ベースバンド部60)は、捕捉したGPS衛星の数及び当該GPS衛星から送信された衛星信号の受信レベルに基づいて、時刻修正情報を生成する制限時間を可変に設定する。
(もっと読む)
ネットワークにおいて位置特定されるデバイスのロケーションを求めるための方法及び装置、並びにそのコンピュータプログラム
【課題】既知のロケーションを有する一群のデバイスを含むネットワークにおいて位置特定されるデバイスのロケーションを求めるための方法を提供する。
【解決手段】少なくとも1つの送信信号の到達時刻を得るステップ、到達時刻の少なくとも一部について、各到達時刻についてのパラメータを求めるステップ、求められた各パラメータについて、2つの拡張パラメータを求めるステップ、各nタプルの拡張パラメータについて、既知のロケーションを有する少なくとも2つのデバイスの位置及びnタプルの拡張パラメータを考慮する関数から点の集合を求めるステップ、既知のロケーションを有する各デバイスの位置及びすべての拡張パラメータを含む条件を満たす、求められた点の集合のうちの点を選択するステップ、並びに選択された点から、位置特定されるデバイスのロケーションを求めるステップ、を含む。
(もっと読む)
混成GNSSおよびTDOAワイヤレス位置検出システム
汎地球測位システム(GPS)受信機および地上系アップリンク到達時間差(UTDOA)受信機を用いた位置判定方法および装置を提供する。本方法は、比較可能な相互相関係数および到達時間差をUTDOA基準局に関して計算することによって、ダウンリンク衛星測定値を透過UTDOA測定値に変換することを含む。本方法は、重み付け動作を含み、これによって、UTDOA測定値およびGPS測定値の相対的重みを、理論的スケーリング、およびそれに続く経験的調節に基づいて調節する。更に、本方法は、候補の位置検出解とUTDOAおよびGPS測定値との間における加重誤差を最小にするために用いられる距離の効率的な計算および組み合わせを含む。これは、最適な位置検出解に近づくに連れて検索動作の複雑さを増していくことによって、UTDOAについては二次元で、GPS測定値については三次元で効率的に行われる。 (もっと読む)
GPS時計装置、及びその使用地域特定方法
【課題】GPS時計装置において、使用地域の特定時における使用者の作業負担を軽減する。
【解決手段】装置内に、互いに対応する都市名、時差、緯度、経度、面積、人口からなる時差取得テーブル101のデータを記憶しておく。現在時刻を取得する際には、GPS信号を受信し、その受信位置と、GPS信号に含まれる時刻情報により示される時刻を取得する。時差取得テーブル101から、緯度・経度で示される位置が受信位置から所定の距離範囲内にある都市名を検索し、それが複数である場合には、それら複数の都市名を選択候補として表示し、いずれかの都市名を使用者に選択させ、選択された都市名に対応する時差によって、取得した時刻を補正する。複数の都市名を選択候補として表示するときの表示順を、各都市名に対応する人口が多い順、又は各都市名に対応する面積が多い順として、使用者による都市名の選択作業を容易にする。
(もっと読む)
基準信号発振装置
【課題】使用する無線通信の周波数帯が変更された場合に、基準信号の周波数の精度を容易且つ適切に変更することである。
【解決手段】GPS信号を受信してUTCに同期した時間信号を取得するGPSユニット52と、基準信号を発振する基準信号ユニット40と、基準信号ユニット40により発生された基準信号のパルス数を測定する測定時間、又は基準信号の周波数の精度の操作入力を受け付ける操作ユニット53と、GPSユニット52により取得された前記時間信号に基づいて、操作ユニット53により入力された測定時間、又は前記入力された精度に対応する測定時間をカウントするとともに、当該測定時間内の前記基準信号のパルス数を測定し、正確なパルス数からの前記測定したパルス数の誤差をなくすように基準信号ユニット40が発生する基準信号の周波数を補正する制御ユニット51と、を備える。
(もっと読む)
GPS時計装置及びその時刻取得方法
【課題】GPS信号に含まれる時刻情報を用いた現在時刻の取得に要する時差情報を自動的に得る場合における消費電力や所要時間を削減することを可能にする。
【解決手段】採用されている標準時が互いに異なる各々の地域を示す位置情報であって、GPSの基準であるECEF直交座標系による位置情報と、GPSの基準であるUTCに対する各地域の標準時における時差情報とを対応して都市情報記憶部4に予め記憶しておく。現在時刻の取得時には、GPS受信部3がECEF直交座標系により表わされた位置情報を取得する。制御部7は、その位置情報に対応する時差情報を都市情報記憶部4から直接的に取得し、取得した時差情報を用いてGPS信号に含まれる時刻情報により示される現在時刻を補正する。現在時刻の取得に本来不用なECEF直交座標系から測地座標系への位置情報の変換処理を無くして消費電力や所要時間を削減する。
(もっと読む)
受信装置
【課題】未知局102からの電波を複数の受信装置100で受信し、その受信時間の差から未知局102の測位を行う際、各受信装置100内部の遅延時間を合わせる必要がある。
【解決手段】電波検出用の受信機に加え、第2の受信機であるGPS受信機を設ける。GPS衛星から時刻信号を受信し、これを測位のためのデータに関連づける。未知局102からの電波は受信され、増幅器とA/D変換器を経てデジタル信号処理回路へ入力される。この回路でFFTを施し、信号を周波数成分へ展開する。注目周波数の振幅をもとに増幅器の増幅率を制御する。ローパスフィルタはデジタル信号処理回路内に設ける。
(もっと読む)
走行状態推定システム
【課題】自律航法システムとGPSの各方式間の信号の遅延時間を高精度に補償して最終的に決定される測位データの精度を向上させること。
【解決手段】GPS信号に基づき第一のサンプリング周期で測位データを演算して推定手段に出力するGPS測位演算手段と、第一のサンプリング周期より短い第二のサンプリング周期で観測データを出力する自律航法用センサと、第一のサンプリング周期内に自律航法用センサから出力された観測データの組を所定の一次関数に近似する近似式演算手段と有し、該近似式演算手段が、測位データと略同期したタイミングにおける一次関数の近似式の値を切片の値とし、該切片の値を該近似式の傾きの値とともに自律航法データとして推定手段に出力するように構成された走行状態推定システムを提供する。
(もっと読む)
速度計測装置および変位計測装置
【課題】データサイズの制限による値域の制限を有するデータを用いる場合でも、新たに定義する不定値に基づく不定性の概念を利用することにより、受信点の速度を求めることができる速度計測装置、および受信点の変位を求めることができる変位計測装置を提供する。
【解決手段】データ処理部3は、搬送波位相のデータを含む測位用データに基づいて、搬送波位相の速度成分を算出する。続いて、データ処理部3は、搬送波位相のデータに関するデータサイズまたは時間間隔に応じた搬送波位相の速度成分の不定値を算出する。続いて、データ処理部3は、搬送波位相の速度成分に不定値を加算することによって、不定性を解消した搬送波位相の速度成分を算出し、それと方向余弦とに基づいて、受信点の速度を算出する。続いて、データ処理部3は、受信点速度を積算することによって受信点の変位を算出する。
(もっと読む)
GPS受信装置、及びその情報取得方法
【課題】航法メッセージの特定のサブフレームに含まれる特定情報をより少ない消費電力で取得する。
【解決手段】制御部7は特定情報の受信要求に応じてGPS信号の一回目の受信動作を開始し、GPS信号との同期確立後にRF部2と復調部31aへの電力供給を停止する。その際にいずれかのサブフレームから取得した情報に基づき、特定情報の取得に向けた次回の受信開始タイミングを決定する。その後はクロック&同期検出部31bが受信した衛星の受信周波数と衛星固有のPRNコード及びPRNコードの周波数と位相情報を維持したままで、航法メッセージの送信タイミングと同期したカウンタクロック信号に基づいて経過時間を正確にカウントする。経過時間が次回の受信開始タイミングに応じた時間となった時点でRF部2と復調部31aへの電力供給を再開し、二回目の受信動作では短時間で同じ衛星を補足し、特定のサブフレームから特定情報を取得する。
(もっと読む)
同期通信システムのためのマルチセクター速度、モバイル速度及びドップラー推定のための装置及び方法
速度及びドップラー周波数を推定する装置及び方法は、第1の時刻に第1の複数の基地局から第1の複数の到達時間(TOA)メジャーメントを取得することと、第2及び第3の時刻に第2及び第3の複数の基地局から第2及び第3の複数の到達時間(TOA)メジャーメントを取得することと、前記第1、第2及び第3の複数のTOAメジャーメントを使用して、複数の視線距離メジャーメントを判定することと、前記複数のLOS距離メジャーメントを使用して、複数の速度推定及び複数の到来角(AOA)推定を判定することと、前記複数の速度推定及び前記複数のAOA推定を使用して、複数のドップラー周波数推定を判定することと、複数のセクターにわたって平均ドップラー周波数推定を判定するためにプロセッサを使用すること(前記第1、第2及び第3の複数のTOAメジャーメントは、前記複数のセクターにわたって得られる)を含む。  (もっと読む)
(もっと読む)
121 - 140 / 359
[ Back to top ]