
Fターム[5J062EE05]の内容
Fターム[5J062EE05]に分類される特許
101 - 120 / 359
補助データを使用する衛星測位方法
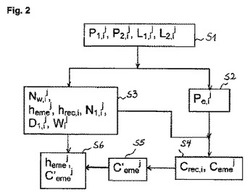
【課題】補助データを使用する衛星測位方法
【解決手段】必ずしも多数の周波数を観察することなく、ユーザーの衛星測位受信機が位相のアンビギュイティを解決できるようにするために、基準ネットワーク(10、12、14)で行う測定により補助データを発生し、このデータをユーザーの受信機へ送る。使用する補助データは、キャリアコードのスライディング組み合わせ(Θeme)に関連するか、または送信機のクロック値を再構成するのに十分なデータに関連する送信機のクロック値から成ることが好ましい。搬送波コードのスライディング組み合わせ(Θeme)に関連する送信機のクロック値は、例えば電離圏の影響のない送信機のクロック値(heme)およびクロックバイアス(C’eme)から再構成できる。
(もっと読む)
時刻決定方法及び時刻決定装置

【課題】弱電界環境等においても時刻を決定することのできる新たな手法を提案すること。
【解決手段】携帯型電話機は、GPS衛星から搬送波信号であるGPS衛星信号を受信し、受信した信号からデータビットパターンを復調して取得する。そして、取得した受信データビットパターンと、格納済みのエフェメリスを用いて生成した照合用ビットパターンとをビット単位で順番に照合していき、照合によって連続して一致したと判定されたビット長及び連続して不一致と判定されたビット長を合算した累積連続ビット長に基づいて、受信データビットパターンと照合用ビットパターンとの適否を判定する。そして、適否判定により適合と判定された場合に、例えば、航法データの通信フォーマットとして規定されているテレメトリーワード(TLM)の受信タイミングを用いて時刻を決定する。
(もっと読む)
衛星信号受信装置および衛星信号受信装置の制御方法
【課題】効率的な受信処理を実行できて電力消費も抑制できる衛星信号受信装置の提供。
【解決手段】衛星信号受信装置は、衛星信号を受信する受信手段と、受信手段を制御する受信制御手段400を備える。受信制御手段400は、受信手段により衛星信号を検索する衛星信号検索手段401と、衛星信号検索手段401で衛星信号を捕捉した衛星数に応じて測位モードまたは測時モードを選択する受信モード選択手段402と、受信モード選択手段402で測位モードが選択された場合に、受信手段により衛星信号を受信して位置情報を取得する測位処理を行う測位処理手段404と、測時モードが選択された場合に受信手段により衛星信号を受信して時刻情報を取得する測時処理を行う測時処理手段403とを備える。
(もっと読む)
位置算出方法及び位置算出装置
【課題】時刻誤差を求めずに位置を算出するための全く新しい位置算出手法を提案すること。
【解決手段】位置算出装置を具備した携帯型電話機1は、衛星軌道情報に基づいて、位置算出時刻におけるGPS衛星の衛星位置、衛星移動速度及び衛星移動方向を含む衛星情報を算出する。また、GPS衛星からGPS衛星信号を受信して擬似距離を算出する。そして、複数のGPS衛星に係る、衛星情報と擬似距離とを用いて位置算出時刻に含まれる時刻誤差を求める算出式に基づいて、携帯型電話機1の位置を算出する。この際、複数の測位用衛星に係る時刻誤差の算出式を連立させることで、時刻誤差を未知数から削除する。
(もっと読む)
位置・時刻算出装置および時計
【課題】 アンテナの配置やサイズに制約が大きい小型の機器であっても、GPS電波を適切に受信することができる。
【解決手段】 時計装置10は、直交する3軸方向(X軸、Y軸およびZ軸)のそれぞれの加速度成分を検出する3次元加速度センサを含む加速度検出回路34を有する。アンテナ12は平面状で、かつその指向性がアンテナの面に対して垂直方向にあり、3次元センサは、アンテナの面と平行にX軸、Y軸を有し、垂直方向にZ軸を有する。CPU12は、3次元加速度センサのX軸、Y軸およびZ軸の成分に基づき、アンテナにおいて適切な指向性を示す、当該アンテナの最適方向を算出し、表示部32に表示する。
(もっと読む)
無線通信信号による衛星位置決めの強化
【課題】様々な無線環境で位置決め可能で、GPSシステムのような全地球衛星航行システムとセルラ形態系で実用の無線システムとを両方使うシステムを提供する。
【解決手段】SPS受信器は、少なくとも一つのSPS衛星からSPS信号を受信する。SPS受信器は、セルラ無線システムにおいてメッセージを送受信する通信システムに接続され、かつ典型的にはそれと一体的に構成されている。そして、セルベース・トランシーバと通信システムとの間におけるセル基準通信信号に含まれるメッセージの伝搬時間を表す時間測定値が測定される。SPS受信器の位置は、少なくとも、セル基準通信信号に含まれるメッセージの伝搬時間を表す時間測定値とSPS信号の伝搬時間を表す時間測定値の組み合わせから検知される。セル基準通信信号は、セルベース・トランシーバと通信システムとの間で双方向にデータメッセージを伝達することが可能である。
(もっと読む)
全地球航法衛星受信機における解決遅延の制御
【課題】解決遅延の問題を解決する方法および装置を提供すること。
【解決手段】受信した衛星航法信号と受信した非衛星信号とに基づいて位置を算出する衛星測位装置を開示する。ローカル・クロックが衛星信号プロセッサのエポック区間を制御する。衛星信号プロセッサと非衛星信号プロセッサをよりよく同期させるために、ローカル・クロックに補正信号を適用する。
(もっと読む)
測位装置および測位方法
【課題】測位側が自方の電波送信を行う送信アンテナを不要とし、他のセンサに自身の位置等を探知される被探知確率の軽減化を図る。
【解決手段】目標電波源1が放出する送信信号2を中央センサ3および周辺センサ6a,6bで受信し、当該送信信号2に受信時刻を付加して記録する。当該受信時刻のデータと、目標電波源1と中央センサ3との伝搬距離および目標電波源1と周辺センサ6a,6bとの伝搬距離の違いとにより決定付けられる電波の各到来時間差を算出し、算出された到来時間差を用いて、等時間差線を求め、それの交点を目標電波源1の位置として特定する。
(もっと読む)
低地球軌道(LEO)衛星を使用したローカルクロック周波数の較正
衛星信号を使用してローカルクロックの周波数を較正する様々な技術が提供される。一実施例においては、衛星から機器へ周波数安定性を伝送する方法は、衛星から信号を受信することを含む。本方法はまた、衛星信号からコード位相を決定することも含む。本方法はさらに、支援情報を受信することを含む。さらに、本方法は、コード位相と支援情報を使用して機器のローカルクロックの周波数を較正することにより、ローカルクロック周波数を衛星のクロック周波数と実質的に同期させることを含む。  (もっと読む)
(もっと読む)
GPS受信機を備えた地震測定システム
【課題】地震データ収集システムに関連し、特に、3次元地震データを収集して解析するためのシステムを提供する。
【解決手段】3次元地震データを解析するためのシステムは、複数のデジタイザ装置(7)(各々が一式の地中聴音器(8)を備えている)、データ記録及びコントロールセンター(12)、関連するアンテナ(5)を有する基地GPS受信機、及び基地GPS受信機により提供される追跡支援情報を使用して、GPS衛星(9)信号を取得して追跡する、それぞれのデジタイザ装置(7)に設けられた低電力のスレーブGPS受信機(6)を備える。スレーブGPS受信機(6)は、追跡支援情報を使用して樹葉(11)による天蓋状の覆いの存在などのサイトにおける条件のために受信機で比較的弱くなっている場合があるGPS衛星信号を取得して追跡する。システムは、長時間にわたってスレーブGPS受信機(6)によって提供された距離情報を処理する。
(もっと読む)
GNSS受信機におけるGNSS時刻を取得する方法及び装置
GNSS受信機におけるGNSS時刻を取得する方法であって、第1のクロック信号と受信したGNSS時刻との間の時間的関係を取得するステップと、第1時点における第1のパルス5の関係を取得するために、第2のクロック信号のクロック値B1を取得し、更に第1のクロック信号の関連クロック値A1を取得するステップと、前記時間的関係に従い、前記クロック値A1に対応するGNSS時刻を計算するステップと、第2時点における第2のパルス関係を取得するために第2のクロック信号のクロック値B2を取得し、更に第1のクロック信号の関連クロック値A2取得するステップと、前記GNSS時刻C1、前記クロック値B1、10及び前記クロック値B2に従い、GNSS時刻C2を計算するステップと、を有する。 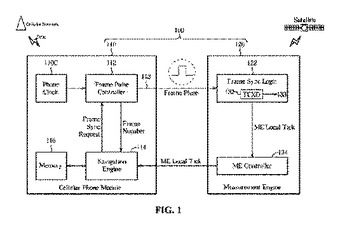 (もっと読む)
(もっと読む)
GNSS受信装置及び測位方法
【課題】測定精度を向上させること。
【解決手段】GNSS受信装置は、GNSS衛星からの測位信号に含まれるコードを用いて、当該GNSS受信装置により観測すべきデータを求める手段と、GNSS衛星からの測位信号に含まれる軌道情報に基づいて、GNSS衛星の位置を算出する手段と、測位信号以外の情報に基づいて、当該GNSS受信装置の位置を推定する手段と、算出されたGNSS衛星の位置と、推定された当該GNSS受信装置の位置とに基づいて、GNSS衛星と当該GNSS受信装置との間で観測すべきデータを推定する手段と、当該GNSS受信装置の有する誤差に起因する観測データの誤差を推定する手段と、観測データと、観測データ推定値と、受信装置誤差推定値に基づいて、観測データに含まれる誤差を推定する観測データ誤差推定部と、推定された観測データ誤差が所定の閾値以下である観測データを用いて測位演算を行う手段とを有する。
(もっと読む)
ワイヤレス通信またはブロードキャスト・システムにおける干渉の検出、特徴化、および位置判定
広域センサ・ネットワーク(WASN)を開示する。このWASNは、広帯域ソフトウェア定義無線機(SDR)を利用して広い周波数範囲にわたってRFエネルギを監視し、重要な周波数が妨害されているまたは干渉を受けているときを検出し、干渉を排除することができるように、干渉ソースの位置を判定する。WASNは、1つ以上のジオロケーション技法を用いることができる。加えて、WASNは、不正送信を検出しその位置を判定することができ、更に正規の送信機の送信電力を推定し、これらが許可されている以上の電力を送信していないことを保証することができる。 (もっと読む)
GPS受信機用の時間を決定するための方法
【課題】 全地球測位システム(GPS)受信機用の時間を決定する方法を開示する。
【解決手段】 セルラー電話送信信号など、通信システムから導出されるタイミング信号をGPS受信機で受信してデコードし、正確な時間情報を提供する。タイミング信号は、タイミング・インジケータでマークを付けた同期化事象の形式にするか、またはシステム時間情報としての形式にすることができる。GPS受信機が受信した衛星位置信号とともにタイミング信号を使用して、GPS受信機の位置を決定する。
(もっと読む)
GPS受信機用の時間を決定するための方法
【課題】 移動ユニットの位置を決定するために使用される全地球測位システム(GPS)受信機用の時間を決定する。
【解決手段】 セルラー電話送信信号など、通信システムから導出されるタイミング信号をGPS受信機で受信してデコードし、正確な時間情報を移動ユニットが提供する。この時間情報は、タイミング・インジケータでマークを付けた同期化事象の形式にするか、またはシステム時間情報としての形式にしたセルラー通信信号内の時間情報とGPS受信機が受信した衛星信号から決定する。
(もっと読む)
ノード処理遅延のネットワークセントリックな決定
移動局の現在位置を決定するためにワイヤレスアクセスポイント内の遅延を較正する装置および方法を対象とする。ある方法は、傍受デバイスにおいて初期パケットを受信することと、傍受デバイスにおいて、別のエンティティによって送られる、応答パケットを受信することと、パケット到達時間に基づいて時間差を算出することと、現在位置決定エンティティに対して時間差を提供することと、を含む。別の方法は、情報を送るために適切な傍受デバイスに対してリクエストを提供することと、各適切な傍受デバイスから、ワイヤレスアクセスポイントによって送信されるパケットの到達時間と移動局によって送信されるパケットの到達時間との差を表す時間差を受信することと、時間差に基づいて処理遅延推定値を決定することと、処理遅延推定値と受信される時間差とに基づいて移動局の現在位置を決定することと、を含む。  (もっと読む)
(もっと読む)
衛星位置決めシステム受信機を作動する方法および装置
【課題】衛星位置決めシステム受信機を作動する方法および装置
【解決手段】クライアント/サーバアーキテクチャにおいて衛星位置決めシステム(SPS)受信機を操作するための装置および方法。方法の1事例において、第1の時間に第1の複数の擬似距離が決定され、第1の時間の後の第2の時間に第2の複数の擬似距離が決定される。第1の複数の擬似距離および第2の複数の擬似距離は記憶される。第2の時間の後、第1の複数の擬似距離および第2の複数の擬似距離は、通常1つの送信でロケーションサーバに送信される。該ロケーションサーバはその後、該第1の複数の擬似距離から第1位置を決定し、該第2の複数の擬似距離から第2位置を決定する。1つの特定の例においては、該第1の複数の擬似距離および該第2の複数の擬似距離は、所定の種類の事象に応答して送信され、該ロケーションサーバは、時間にわたり収集されたディファレンシャルGPSデータの集合を記憶する。
(もっと読む)
衛星時刻同期方法及び衛星時刻同期システム
【課題】建物内のような環境下で、衛星から送られてくる減衰された超微弱な信号から、正確な時刻同期を可能とする。
【解決手段】衛星2からの信号Sを受信機端末5にて受信して、パターン化された特定部位Aを検出して、サブフレーム先端ビットEを検出する方法である。
(もっと読む)
位置・時刻算出装置および時計
【課題】 装置の位置、たとえば、屋外或いは屋外の何れに位置しているかに応じて適切な測位を実現する。
【解決手段】 CPU20は、電力供給回路34に設けられた太陽光発電回路の発電による電気信号に基づき、光の強度に応じた信号を取得し、取得した信号が所定の周期性を有するか否かを検出する。信号が所定の周期性を有すると判断した場合に、CPU20は、GPS信号処理部18が、2次元測位モードにて測位すべきと判断し、信号が所定の周期性を有していないと判断した場合には、GPS信号処理部18が、3次元測位モードにて測位すべきと判断する。GPS信号処理部18は、決定された測位モードにしたがって、所定数のGPS衛星からのGPSフレームデータを取得する。
(もっと読む)
ドップラー効果を補正する装置を備える受信機
デジタル係数セットを含む時間デジタルフィルタの使用に基づくチャネル推定及び補正手段、並びにキャリア間干渉除去手段を有するOFDMデジタル通信受信機が提供される。受信機は、各々が所定のデジタル係数セット及びエントリポインタに対応するn個のルックアップテーブルLUT(n)を含む。  (もっと読む)
(もっと読む)
101 - 120 / 359
[ Back to top ]