
Fターム[5J070AB18]の内容
レーダ方式及びその細部 (42,132) | 送信信号 (3,620) | 連続波(CW) (917) | 周波数変調(FM−CW) (701) | 鋸歯状波 (36)
Fターム[5J070AB18]に分類される特許
1 - 20 / 36
車両の監視方法及び監視装置

【課題】新規な原理を用いた車両の周辺を監視する装置を実現する。
【解決手段】車両のボディを励振信号で励振する送信装置と車両のボディに近接して電磁波を受信する受信装置とを有する。受信装置は、復調器30と、目標周波数設定レジスタと、目標位相設定レジスタを有する。目標周波数と目標位相とに一致した周波数と位相の基準信号を出力するパルス発振器と、基準信号と送信監視信号との位相差を示す位相差信号を出力する位相比較器32を有する。位相差信号の時間変動から基準信号と送信監視信号の周波数差をもとめ、パルス発振器の目標周波数を制御する周波数制御装置と、位相差信号の示す位相差に基づいてパルス発振器の目標位相を制御する位相制御装置を有する。目標位相を、異なる時刻で検出し、その変動量が所定値以上か否かを判定し、変動量が所定値以上であると判定された場合には、車両の周辺に異常が発生したとして、警報する。
(もっと読む)
チャープ信号生成回路、FMCW方式合成開口レーダ、アンテナ装置及び飛翔体

【課題】マイクロ波広帯域チャープ信号生成を低コストで実現することにある。
【解決手段】基準信号生成部(DDS72)と、位相同期ループ(PLL74)とを備える。基準信号生成部は、水晶発振器(80)で発生させた信号から線形チャープ信号の基準信号を演算し、この基準信号から高周波成分を除去する。前記位相同期ループは、前記基準信号生成部で生成した前記基準信号を受け、中心周波数、周波数傾き及び繰り返し周期をパラメータに用いて線形チャープ信号を生成する。
(もっと読む)
距離測定装置
【課題】距離測定装置において、測定期間の延長及び製造コストを抑えながら、測定可能な距離範囲を近距離側にも遠距離側にも拡げる。
【解決手段】距離測定装置においては、周波数制御回路により周波数掃引される送信波と反射波との合成波のパワーが検出され、その検出信号が、分析回路により、特定の処理期間、サンプリングされ、その周波数成分が分析される。そして、その分析結果を基に距離が算出される。上記周波数制御回路は、周波数掃引幅が互いに異なる掃引パターンP1、P2、P3の各々に従って掃引する。従って、測定対象物までの距離が、近、中、遠距離のいずれであっても、上記検出信号の周波数を、分析回路により分析可能な周波数範囲内に収めることができ、各距離を測定することができる。しかも、近/遠距離側の測定範囲を拡げるために、上記処理期間を延ばしたり、分析回路を高速度の演算が可能なものにしたりしなくて済む。
(もっと読む)
車載用レーダ装置及び車載用レーダシステム
【課題】多周波変調異常を検出する機能を有する車載用レーダ装置を提供する。
【解決手段】2周波CW変調処理部101のように、送受信信号のIF信号に位相差が発生するような変調処理方式と、FM変調処理部102のように、送受信信号から得られるドップラ周波数がターゲット距離に応じて変動するような特性を持つ変調方式を有し、前記位相差から算出されるターゲット距離と、前記ドップラ周波数の変動量から算出されるターゲット距離の差分が所定値以上になった場合、多周波変調処理が異常であると判断することができる。
(もっと読む)
移動体周辺監視システム
【課題】複数の距離測定センサを備えた移動体周辺監視システムにおいて、各距離測定セ
ンサにより高精度に障害物までの距離を測定し、しかも、製造コストを低減する。
【解決手段】移動体周辺監視システムにおいて、センサ制御装置は、各距離測定センサに
よる距離測定範囲に対応した周波数掃引幅の掃引パターンを記憶している。センサ制御装
置は、各距離測定センサに、その取付位置に応じて距離測定範囲を設定し、その距離測定
範囲に対応する周波数掃引幅の掃引パターンP1、P2、P3に従ってセンサ内の信号源
の発振周波数を掃引させる。これにより、各距離測定センサの取付位置に応じた夫々の距
離測定範囲で各距離測定センサにより高精度に距離を測定することができる。しかも、上
記掃引パターンはセンサ制御装置が記憶しているので、各距離測定センサはその構成を共
通化することができる。
(もっと読む)
自動車用レーダ・システムおよび方法
【課題】 アンテナ・ビームの各々における距離ゲートを変化させることによって、検出ゾーンのカバレッジを可変とする。
【解決手段】 レーダ検出プロセスは、FFT出力信号の導関数を計算し、指定検出ゾーン内において物体を検出することを含む。一実施形態では、FFT出力信号の二次導関数におけるゼロ交差が物体の存在を示す。物体の距離は、ゼロ交差が発生した周波数の関数として判定する。また、各レーダ・ビームおよび処理サイクルにおいて物体の有無を示す指標を収容した検出表についても記載する。このような指標を少なくとも2つ組み合わせて、検出ゾーンにおける物体の有無を検出する。
(もっと読む)
レーダセンサ
本発明は、相並んで配置された複数のアンテナ素子(41)と、外側のアンテナ素子(41)に繋がった少なくとも1つの給電点(43l、43r)と、を有するアンテナ構成(40)を備えたレーダセンサに関する。アンテナ素子(41)は、遅延区間(42)を介して直列に相互接続される。本発明によれば、レーダセンサは、所定の周波数のレーダ信号を生成し評価することに適した少なくとも2つの送受信ユニット(20)を有する。少なくとも2つの送受信ユニット(20)は、アンテナ構成(40)の給電点(43l、43r)と接続される。少なくとも2つの送受信ユニット(20)のレーダ信号の周波数は、互いに独立して設定可能である。 (もっと読む)
周波数変調レーダシステム内の干渉を抑制するためのシステムおよび方法
本発明は、第1のマイクロ波放射を放出するための放出器と、第1のマイクロ波放射から引き出される第2のマイクロ波放射を検出するための受信機と、放出器および受信機に接続された制御システムとを有するシステムに関している。第1のマイクロ波放射は、複数の時間ポイントで、これらの時間ポイントに割り当てられた異なる周波数で放出される。時間ポイントと周波数の相関は、ランダムまたは擬似ランダムである。別法または追加として、時間ポイントにおける放出または受信のための時間期間の長さもランダムまたは擬似ランダムである。本発明は、さらに、周波数変調レーダシステム内の干渉を抑制するための方法に関している。 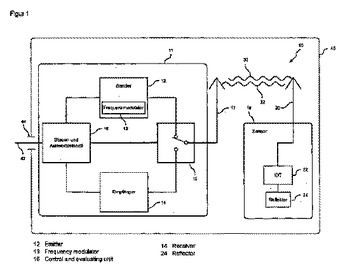 (もっと読む)
(もっと読む)
レーダシステム
【課題】電圧制御発振器2を用いてチャープ信号を生成するレーダシステムで、例えば、FMCWレーダにおいて、電圧制御発振器の周波数非線形性や周波数偏差を補正する。
【解決手段】ミキシング手段3、11、12が電圧制御発振器により生成されたチャープ信号を所定の単一周波数の信号でミキシングして、電圧制御発振器の中心周波数をキャンセルする。A/D変換手段13がミキシング手段により得られた信号に対してアナログ−デジタル変換を行って、デジタルサンプル値を生成する。誤差検出手段14〜18が生成されたデジタルサンプル値について理想的なチャープ信号との誤差を検出する。制御手段19〜22が、誤差検出手段により検出される誤差が0に近づくように、電圧制御発振器に対する周波数制御信号を制御する。
(もっと読む)
物体までの距離および/または物体の相対速度の明確な判定を行うための方法、運転者支援デバイス、および車両
本発明は、自動車(1)の中の周波数変調連続波レーダ(3、4)によって、自動車(1)に対する物体までの距離、および/または物体の相対速度の明確な判定を行うための方法に関する。周波数変調連続波レーダ(3、4)は、1回の測定サイクルの中で、所定のシーケンスの周波数変調信号パルス(23)を送信し、そのシーケンスによって、距離に対する明確エリア(RUn)、および/または相対速度に対する明確エリア(VUn)が判定される。この場合、距離に対する互いに異なる明確エリア(RUn)、および/または相対速度に対する互いに異なる明確エリア(VUn)が、連続する少なくとも2回の測定サイクルに対して規定され、距離および/または相対速度は、それぞれの場合に、各測定サイクルから得られる距離および/または相対速度に対する少なくとも1つの測定値に基づいて判定される。 (もっと読む)
レーダ装置、目標探知方法及びプログラム
【課題】速度分散の大きいウェザクラッタ等を高度に抑圧でき、各受信信号で得たドップラ情報から目標の対レーダ速度を得る。
【解決手段】同一の変調の2以上の単位信号を送信単位である1パルス内に繰り返して配列したレーダ信号を生成する信号生成部と、前記レーダ信号を形成する同一の変調を施した単位信号を参照信号として、前記受信信号に含まれる単位信号の成分を圧縮するパルス圧縮部と、1パルス内でクラッタ成分を抑制するパルス内クラッタ抑圧部と、前記受信信号に消え残る信号成分を抑圧する消え残り信号抑圧部と、探知目標で反射した各距離の受信信号の単位信号をピックアップし、フーリェ変換処理により受信信号をドップラ周波数毎に積分して単位信号列積分値を得る単位信号列積分部と、前記単位信号列積分値を積分するパルス間信号積分部と、前記積分値について、閾値より大きい信号を目標信号として抽出する目標信号抽出部とを有している。
(もっと読む)
レーダトランスポンダ
【課題】不要な信号が出力されてしまうことを抑圧できるレーダトランスポンダを提供する。
【解決手段】パフォーマンスモニタ6は、周波数制御信号発生器25と、可変減衰器28と、を備える。周波数制御信号発生器25は、電圧制御発振器27に対して周波数制御信号を送信することにより、前記応答信号の周波数を、第2周波数から第1周波数に変化させる動作と、第1周波数から第2周波数に変化させる動作とを実現可能である。可変減衰器28は、前記応答信号の周波数が第1周波数から第2周波数に変化するときの少なくとも一部の期間は、当該応答信号の出力レベルを減衰させる。
(もっと読む)
FMCWレーダセンサ、及び、周波数マッチングのための方法
本発明は、FMCWレーダセンサにおける周波数マッチングのための方法であって、レーダセンサにより測定された物体をそれぞれに表し、様々な変調ランプ上で獲得される複数の周波数が、物体の間隔dと速度vとの可能な組み合わせを表す軌跡(g1〜g4)としてd−v空間(26)内に示され、様々な変調ランプ上で測定される物体を識別するために、様々な変調ランプ上で獲得される周波数に対応する軌跡間の一致(T、S)が探索される、上記方法において、最初のステップでは、一致(T)の探索がd−v空間(26)の部分空間(40)に限定され、後続のステップでは、探索がd−v空間の他の範囲へ拡大されるとともに、最初のステップで見出された物体に対応する周波数が隠されることを特徴とする方法に関する。 (もっと読む)
レーダ装置、海洋レーダ観測装置およびドップラ周波数データ算出方法
【課題】変化の速い表層流速を検出可能とする。
【解決手段】処理部25は、受信データDrを方位分解処理して第1振幅データを算出し、この第1振幅データに対して、掃引周期のn周期分ずつをn未満の任意の掃引周期でオーバーラップさせつつグループ化し、グループ毎に、第1振幅データに対して掃引周期単位でフーリエ変換を施して所定方向における所定距離毎の振幅を示す第2振幅データを掃引周期単位で算出し、第2振幅データの各グループに対して、各グループに含まれている各第2振幅データを掃引周期順で所定距離毎に並び替えてグループ化し、並び替え処理によってグループ化された第2振幅データに対して、グループ毎に振幅がゼロを示すゼロデータを所定数ずつ付加して新たな第2振幅データとし、ゼロデータが付加された第2振幅データに対してフーリエ変換を施して所定距離毎のドップラスペクトルDdp1,Ddp2を算出する。
(もっと読む)
飛翔体
【課題】比較的近距離の計測制度を確保しつつ装置構成を小型化する。
【解決手段】目標物までの距離を計測しつつ飛翔する飛翔体であって、目標物に対して第1の距離に接近するまではFM−CW方式に基づいて目標物との距離を計測し、第1の距離から第2の距離までの間はCW方式によって得られたビート信号に基づいて目標物との距離を計測する距離計測部を備える。
(もっと読む)
FM−CWレーダ装置
【課題】FM−CWレーダ装置において、受信機の飽和に起因して高調波成分が重畳されたビート信号から高調波成分を除去し、レーダビデオ信号のS/N比を向上すること。
【解決手段】ビート信号BSを、フーリエ変換手段7で、フーリエ変換して各周波数成分を周波数順に未補正ビデオ信号として出力し、次いで、ノイズ除去手段8で、未補正ビデオ信号に基づいて当該変調周期の閾値を求めて、未補正ビデオ信号から閾値を減算して補正済ビデオ信号を得て、1変調周期分の補正済ビデオ信号を周波数順にディスプレイ装置9へ出力する。
(もっと読む)
レーダ送受信機、及びレーダ装置
【課題】 ビート信号のレベルに基づきアップビート周波数とダウンビート周波数のペアリングを確度良く行う。
【解決手段】 レーダ送受信機は、変調期間ごとに所定の周波数変調幅で周波数が上昇する第1の送信信号と、前記変調期間ごとに前記所定の周波数変調幅で周波数が下降する第2の送信信号とを前記変調期間より短いスイッチング周期で交互に切替えて送信し、前記変調期間における前記第1の送信信号とこれに対応する受信信号との周波数差を有する第1のビート信号と、前記第2の送信信号とこれに対応する受信信号との周波数差を有する第2のビート信号とを生成するので、従来、異なる時間帯で生成されていたビート信号を同一の変調期間内にほぼ同時に生成できる。よって、時間差に起因してペアリングすべきアップ/ダウンビート周波数のビート信号にレベル差が生じることがなくなり、ペアリングを確度よく行うことができる。
(もっと読む)
FM−CWレーダ
【課題】検出性能を向上し、より高い周波数で動作する小型のFM−CWレーダを提供する。
【解決手段】FM−CWレーダは、ガンダイオードとバラクタダイオードとを有し、周波数変調された第1の信号を出力する電圧制御型発信器と、目標対象物に第1の信号を送信し、目標対象物により反射された第2の信号を受信する送受信アンテナ装置と、ダイオードを有し、第1の信号と第2の信号とを入力し、第1の信号と第2の信号との周波数の差を表すミキサ出力信号を出力するパッシブミキサと、パッシブミキサを流れる電流の変化分を検出する電流検出回路と、検出されたパッシブミキサを流れる電流の変化分に基づいて、ガンダイオードに電圧を変えて印加することにより、電圧制御型発信器の周波数変調された信号の出力電力を一定にする電圧印加回路とを有する。
(もっと読む)
距離測定
距離測定装置DDMは、送信モードにおいて送信される電磁信号TBと受信モードにおいて受信される電磁信号の反射RBとの間の遅延に基づいて距離指標DVを提供する。距離測定装置は、電磁信号TBを送信するため及びその反射RBを受信するための複数のアンテナを含んでいるアンテナ・モジュールAMを含む。ビーム成形モジュールBFは、それぞれのアンテナに対するそれぞれの大きさ及び位相関係を定めて、2つの前述のモードのうちの少なくとも1つにおいて指向性アンテナ・パターンをアンテナ・モジュールAMに提供させる。好ましくは、ビーム成形及びステアリング制御モジュールBCは、方向コマンドDIRの関数として、それぞれの大きさ及び位相関係を制御する。三次元画像は、二次元画像中のそれぞれの部分のためのそれぞれの距離指標DVを取得するようにそれぞれの方向コマンドDIRを適用することによって形成されることができる。 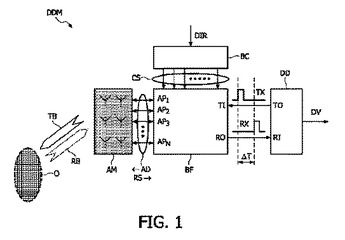 (もっと読む)
(もっと読む)
偏波レーダ装置
【課題】効率的な偏波レーダ装置を提供する。
【解決手段】垂直送信アンテナ16から送信する垂直偏波または水平送信アンテナ20から送信する水平偏波の中の一方を他方に比べて遅延させる。この遅延を対象物の位置の移動が無視できる範囲内とする。垂直受信アンテナ22、水平受信アンテナ24で受信され乗算器28,30で得られたビート信号が信号処理部34で周波数解析され、遅延情報に基づいてビート信号周波数が異なることを利用して4つの偏波成分が分離して取得される。
(もっと読む)
1 - 20 / 36
[ Back to top ]