
Fターム[5J070AH33]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 包絡線検波を行なうもの(振幅による測定) (448)
Fターム[5J070AH33]に分類される特許
121 - 140 / 448
電波センサ
【課題】被検知体の位置や移動状態を精度良く識別するコンパクトな電波センサを提供する。
【解決手段】第2接地電極23を背面に備えた受信アンテナ(受信電極22a、22bとが一対、受信電極22c、22dとが一対)を、第1接地電極13を背面に備え電波ビームを前方に放射する送信アンテナ(送信電極12)の周囲、且つ送信アンテナよりも上方側に配置し、送信アンテナから放射され、被検知体に衝突し反射して戻ってきた電波ビームを受信し、受信アンテナに流れる電流をダイオード24a、24bにて検波し、その検波結果に基づいて制御部53に備えた動作判断回路にて被検知体の動きを判断する。
(もっと読む)
物体検知装置、周辺監視装置、運転支援システムおよび物体検知方法

【課題】様々な物体を高精度に認識することのできる物体検知装置、物体検知方法、またかかる物体検知を用いた周辺監視装置および運転支援システムを提供すること。
【解決手段】物体検知波部10は、カメラ32が撮影した画像に対する画像認識によって物体候補領域を識別し、当該領域に存在する可能性のある物体の種別、方向、距離、角度に基づいてレーダ検知の閾値を設定した閾値マップを作成する。検知処理部16は、レーダ31の反射波強度と閾値マップに示された閾値とを比較して、物体の存在を検知する。
(もっと読む)
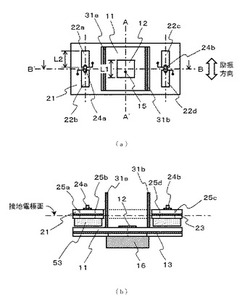
電波センサ
【課題】被検知体の位置や移動状態を精度良く識別するコンパクトな電波センサを提供する。
【解決手段】電波ビームとして前方に放射する少なくとも第1接地電極13と薄膜状の送信電極12とを有する平板状の送信アンテナの放射面に対し、被検知体に衝突し反射して戻ってきた電波ビームを受信する少なくとも第2接地電極23と薄膜状の受信電極22a、22b(一対のダイポールアンテナ)とを有する平板状の受信アンテナの受信面が略直交し、且つ送信電極12に対して受信電極22a、22bよりも第2接地電極23が近接するように、受信アンテナを配置する。
(もっと読む)
電波センサ
【課題】被検知体の位置や移動状態を精度良く識別するコンパクトな電波センサを提供する。
【解決手段】少なくとも1つの受信アンテナ(受信電極22a、22bとが一対)を、第1接地電極13を背面に備え電波ビームを前方に放射する送信アンテナ(送信電極12)の周囲、且つ送信アンテナよりも下方側に配置し、送信アンテナから放射され、被検知体に衝突し反射して戻ってきた電波ビームを受信し、受信アンテナに流れる電流をダイオード24で検波し、その検波結果に基づいて制御部53に備えた動作判断回路にて被検知体の動きを判断する。
(もっと読む)
レーダ模擬信号発生器
【課題】 局部発振器のリーク信号の影響を受けることなく模擬信号のダイナミックレンジの拡大を図ることができるレーダ模擬信号発生器を提供する。
【解決手段】 波形データ発生器1はIデータとQデータから得られる最大振幅値を最大振幅検出回路9で検出して出力する。この最大振幅値のデータをミクサ5a,5bで局部発振信号により周波数変換し、混合器6で混合し、帯域通過フィルタ7でろ波し、増幅器8で増幅する。振幅補正演算回路10は最大振幅値とIデータ及びQデータの振幅値とから振幅補正値を演算し、振幅制御回路12はこの振幅補正値に基づいて増幅器8から出力する高周波信号を振幅制御して模擬信号を出力する。高周波信号のレベルを局部発振器のリーク信号のレベルよりも高くでき、模擬信号に対するリーク信号の影響を解消し、模擬信号のダイナミッグレンジを拡大する。
(もっと読む)
試験装置および試験方法
【課題】電波信号を受信して反応する電子装置の通信限界距離を高精度で簡単に求めることができる試験装置および試験方法を提供する。
【解決手段】RFIDタグに対して電波信号を発信するストリップラインセルにその電波信号に相当する電気信号を供給する、固有の出力特性を有するリーダライタに出力レベルを指定する制御装置300において、RFIDタグにおける反応の有無を確認するレスポンス解析部310と、リーダライタに指定した出力レベルから、そのリーダライタの出力特性を用いてRFIDタグで受信される電波信号の電界強度を求め、その電界強度を、所定のアンテナが所定の出力で電波信号を発信してRFIDタグがその電界強度と同じ電界強度で受信する状況におけるそのアンテナとそのRFIDタグとの距離に換算する距離計算処理部312とを備えた。
(もっと読む)
パルス発生方法、パルス発生装置およびレーダ装置
【課題】キャリアリークによる周波数スペクトラムのピーク値の増大を大幅に低減したパルス発生方法、パルス発生装置およびレーダ装置を提供する。
【解決手段】パルス発生装置100は、インパルス信号101を出力するパルス信号生成部110と、所定の周波数のローカル信号102を出力する高周波源120と、インパルス信号101とローカル信号102とを乗算するミキサ130と、高周波源120からミキサ130に出力されるローカル信号102を遮断するためのスイッチ140およびこれを制御するスイッチ制御部150とを備えている。パルス信号生成部110では、双極性パルスを発生させ、これをベースバンドインパルス信号101として出力している。
(もっと読む)
自律移動装置及び平面状障害物認識方法
【課題】平面状障害物の位置を単純な手順により認識可能とし、正確に自己位置を特定して、効率的で安全な自律走行を可能とする。
【解決手段】レーザビームを用いて水平面内をスキャンし、複数のスキャンポイントの座標を取得し、得られた順番が時系列的に前後する2つのスキャンポイントについて、前のスキャンポイントを始点とし後のスキャンポイントを終点とする要素ベクトルを形成し、複数の要素ベクトルの中から、得られた順番が時系列的に前後し、かつ互いに連続する複数の要素ベクトルであって、その長さがそれぞれ第1所定長以下であり、1つの要素ベクトルに対してそれに連続する他の要素ベクトルがなす振れ角度が第1所定角度以下であり、振れ角度の積算値が第2所定角度以下であるものをベクトル合成し、始点と終点により定義される線分が第2所定長以上であるときに、そのスキャンセグメントベクトルに沿って平面状障害物が存在していると認識する。
(もっと読む)
検査装置
【課題】多くの検査対象に対して効率的に、かつ、自動判定により危険物の検査を行うこと。
【解決手段】人物にミリ波を照射するミリ波送信部7と、ミリ波送信部7により発せられ人物から反射されたミリ波の反射波を受信して輝度情報を出力するミリ波受信部9と、ミリ波受信部9により出力された輝度情報に基づきマトリックス状のピクセルからなる2次元画像を生成する画像生成部13と、輝度情報に基づく反射波の反射率、2次元画像全体における所定の反射率以上のピクセルが占める面積比率、および、2次元画像全体における所定の反射率以上のピクセルが連結する度合いに基づいて危険物の有無を判定する演算部11とを備える検査装置1を提供する。
(もっと読む)
水栓装置
【課題】被検知体の動作変化を略静止を含む2つ以上の異なる状態に分別し、その状態間の時系列的な変化から被検知体とその動作状態を判定し、最適なタイミングで吐水を行うことができる水栓装置を提供する。
【解決手段】吐水部と、前記吐水部への水路を開閉するバルブと、放射した電波の反射波によって被検知体に関する情報を取得するセンサ部と、前記センサ部からの検知信号を所定の周波数帯域に分別する第1のフィルタ部と、前記分別された検知信号に基づいて前記吐水部からの吐水の可否を判定し、前記バルブの開閉を制御するバルブ制御部と、を備え、前記第1のフィルタ部は、第1の周波数帯域を有する第1のフィルタと、前記第1の周波数帯域よりも高い第2の周波数帯域を有するフィルタが少なくとも1つ設けられた第2のフィルタ部と、を有し、前記第1の周波数帯域には、被検知体の略静止状態を検知するための直流成分が含まれていること、を特徴とする水栓装置が提供される。
(もっと読む)
走査型測距測角センサ用データ処理装置
【課題】処理能力の制約や移動体の運動や動揺に関わらず移動体と対象物間の相対距離と相対姿勢を高速,高精度に取得する。
【解決手段】開示される走査型測距測角センサ用データ処理装置は、受信強度信号10と距離計測信号11とAZ角度計測信号12を生成する2軸駆動型測距/測角センサ1と、有効強度信号14と有効距離信号18と有効AZ角度信号19と有効EL角度信号20を生成するデータ切り出し処理器2と、データインデックス信号15を生成する有効データ2値化処理器3と、データ集中度インデックス信号16を生成するデータ集中度判定処理器4と、グループ化データインデックス信号17を生成するデータグルーピング処理器5と、ターゲット距離信号21とターゲットAZ角度信号22とターゲットEL角度信号23とグループデータ個数信号24を生成するターゲット抽出/距離・角度生成器6と、その各信号を格納する測距/測角データ格納メモリ7を備える。
(もっと読む)
位置測定装置および該方法
【課題】本発明は、単一の送信アンテナおよび単一の受信アンテナで物体の位置を測定することができる位置測定装置および位置測定方法を提供する。
【解決手段】本発明にかかる、物体の位置を測定する位置測定装置1は、送信信号を空間に放射する単一の送信アンテナA1と、物体によって散乱され複数の伝播経路で伝播した、送信信号に起因する散乱波を受信信号として受信する単一の受信アンテナA2と、受信アンテナA2で受信した受信信号の波形に基づいて時間逆転法によって物体の位置を演算する演算処理部13とを備え、複数の伝播経路には、電波を散乱可能であって形状および位置が既知である電波散乱体を経由した伝播経路が少なくとも1つ含まれる。
(もっと読む)
マルチスタティックレーダ装置
【課題】送信側のレーダ装置と受信側のレーダ装置と距離が未知の場合であっても直接波の影響を排除できるマルチスタティックレーダ装置を提供する。
【解決手段】送信側のレーダ装置から送信された電波を受信側のレーダ装置で受信して目標を検出するマルチスタティックレーダ装置において、受信側のレーダ装置は、送信側のレーダ装置から送信された電波を受信する主アンテナ1と、送信側のレーダ装置から送信された電波を受信する補助アンテナ11aと、主アンテナからの信号に基づき生成された主チャンネル信号の振幅と補助アンテナまたは主チャンネルからの信号に基づき生成された補助チャンネル信号の振幅とを比較する振幅比較器6と、振幅比較器により主チャンネル信号の振幅が補助チャンネル信号の振幅より大きい場合に、該主チャンネル信号に基づき目標の検出および測角を行う検出/測角器5を備えている。
(もっと読む)
装置間距離判定システム、無線端末装置、プログラム及び記憶媒体
【課題】簡単な構成で、少なくとも2種類の境界において無線端末装置間距離の境界判定を行う。
【解決手段】無線端末装置10の送信部12がN(N≧2)種類の送信電力の無線信号を送信する。無線端末装置20は受信部22で無線信号を受信し、その距離判定部24が、何種類の送信電力の無線信号が無線端末装置の受信部22に受信されたかを判定することにより、無線端末装置10と無線端末装置20との間の距離を判定し、その判定結果に基づき、本体部25の或る機能をロックしたり、本体部25に警告情報を出力させたりする。
(もっと読む)
波源探査装置、波源探査方法、及び波源推定方法
【課題】波源の有無を容易に探査する波源探査装置、波源探査方法、及び波源推定方法を提供することを課題とする。
【解決手段】電磁波の受信強度を測定する測定回数と、測定を行う測定間隔と、波源の存在を通報する通報条件とを夫々対応付けて蓄積しておき、少なくとも各周波数を含む周波数範囲の電磁波をアンテナで受信し、受信した周波数範囲の電磁波のうち任意の周波数に対応する測定回数及び測定間隔に基づいて電磁波の受信強度を測定し、受信強度を測定回数で平均化した平均受信強度を求めることを周波数範囲の各周波数に対して繰り返し、各周波数に夫々対応する各通報条件と、各周波数に対して夫々測定された各平均受信強度とを夫々比較し、平均受信強度が通報条件を満たす場合に波源の存在を通報する。
(もっと読む)
物体種別判定装置、物体種別判定方法、及び物体種別判定用プログラム
【課題】レーダによる検出結果に基づいて、車両等の物体の種別を適切に判定することができる物体種別判定装置、方法、及び物体種別判定用プログラムを提供する。
【解決手段】物体種別判定装置は、レーダ20により複数の方位角に電磁波を照射し、それぞれの方位角における物体の検出点を取得する検出点取得手段11と、取得された複数の検出点のうち、同一の物体についての検出点であると想定される検出点をグループ化して、点列データとして抽出する点列データ抽出手段12と、抽出された点列データが、方位角が増加又は減少するに従って、検出点のレーダ20からの距離が直線的に減少する第1の状態から直線的に増加する第2の状態に切り替わる変位特性を有するか否かを認識する変位特性認識手段13と、変位特性認識手段による認識結果に応じて、点列データが抽出された物体の種別を判断する種別判断手段14とを備える。
(もっと読む)
物体検出装置及び測距方法
【課題】レーダ受信信号から直接計測することができない遠方に存在する対象物体までの距離を高い精度で演算する物体検出装置を提供する。
【解決手段】
【請求項1】車載のカメラ10の撮像画像の情報に基づいて、測距対象となる対象物体と測距の基準とする基準物体との相対位置関係を算出する物体間相対位置算出部30と、車載のレーダ測距装置20により取得された受信信号に基づいて、測距の基準として選択された基準物体と自車両との間の基準距離を求める基準距離計測部40と、レーダ測距装置20が対象物体までの距離を測距できない場合は、対象物体と基準物体との相対位置関係と自車両から基準物体までの基準距離とに基づいて自車両から対象物体までの距離を演算する距離演算部50とを有する。
(もっと読む)
物体検知装置
【課題】自車両の外界に検知された物体が虚像か実像かを容易かつ適切に判定する。
【解決手段】物体検知装置10は、自車両の進行方向に存在する物体を検知する外界センサ11および物体位置検出部31と、検知された物体の自車両に対する相対距離に係る相対関係を算出する相対関係算出部32と、検知された物体が虚像か実像かを判定する虚実判定部34とを備え、自車両に相対する向きに移動する第1物体および第2物体が検知された場合に、第1物体と第2物体との間の車両左右方向距離が所定左右方向距離以上であり、かつ、第1物体と第2物体との間の車両前後方向距離が所定前後方向距離以下である場合に、第1物体および第2物体を判定対象として選択する判定対象選択部33を備え、虚実判定部34は、判定対象選択部33により選択された判定対象が虚像か実像かを判定する。
(もっと読む)
車両用物体認識装置
【課題】車間距離制御に対する適応性を維持しつつ、道路を横断する歩行者等の所定物体を適切に監視すること。
【解決手段】電磁波を放射すると共に該放射した電磁波の反射波を受信する電磁波放射受信手段(14、20)と、該電磁波放射受信手段が受信した反射波のデータに基づいて物標との距離及び横位置を含むデータを算出する物標位置データ算出手段(27)と、該物標位置データ算出手段の算出結果に基づいて車両周辺の物体を認識する物体認識手段(30)と、を備える車両用物体認識装置(1)であって、前記物体認識手段は、前記電磁波放射受信手段における受信波強度に関する所定条件を満たす所定物体以外の物体については、第1の認識モードで障害物認識を行ない、前記所定物体については、前記第1の認識モードに比して物体接近時の横位置応答性が高い第2の認識モードで障害物認識を行なうことを特徴とする。
(もっと読む)
車両用物体認識装置
【課題】横方向に移動する物体に関してピーク周波数探索範囲を適切に設定すること。
【解決手段】電磁波放射受信手段が受信した反射波のデータについてピーク周波数探索範囲を設定し、ピーク周波数探索範囲においてFM−CW方式におけるビート周波数を特定することにより物標との距離及び横位置を含む物標位置データを算出する物標位置データ算出手段と、物標位置データ算出手段が算出した物標位置データに基づいて車両周辺の物体を認識する物体認識手段と、を備える車両用物体認識装置であって、物体認識手段の物体認識は、物体の横位置を予測する処理を含み、物標位置データ算出手段は、物体認識手段が予測した物体の横位置に基づきピーク周波数探索範囲を当初設定し、物体認識手段が予測した物体の横位置と自己が算出した物標の横位置との比較に基づきピーク周波数探索範囲を補正することを特徴とする。
(もっと読む)
121 - 140 / 448
[ Back to top ]