
Fターム[5J070AH33]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 包絡線検波を行なうもの(振幅による測定) (448)
Fターム[5J070AH33]に分類される特許
161 - 180 / 448
検出装置、及び検出方法
【課題】侵入者の有無を確実に検出できる検出装置、及び検出方法を提供すること。
【解決手段】受信波に基づいて侵入者の有無を検出する検出装置において、前記受信波を受信して前記受信波に含まれる受信信号を出力する受信部と、前記受信信号に対して、第1及び第2の閾値により前記受信信号の周期性の有無を判断する判断部とを備え、前記判断部は、前記受信信号のレベルが前記第1の閾値を超えずに、複数回前記第2の閾値以上となったとき、前記受信信号は周期性を有するものと判断することを特徴とする。
(もっと読む)
物体検出装置

【課題】反射強度の入力が不安定な場合には、物体の位置情報を推定することができる。
【解決手段】電磁波センサ30及び画像センサ31と、反射強度が所定値より低いか否かを判定する強度判定部21と、車両進行方向における物体Hの速度成分が所定値より低いか否かを判定する速度判定部22と、強度判定部21によって反射強度が所定値より低いと判定され、速度判定部22によって速度成分が所定値より低いと判定された場合には、車両4の移動量Zに基づいて、物体Hと車両4との相対距離Z2を算出する相対距離算出部23と、画像情報から物体Hの方位情報Y2を取得し、方位情報Y2及び相対距離Z2に基づいて物体Hの位置を推定する位置推定部24とを備えることで、画像センサ31で入力した画像情報を用いて、物体Hの位置情報を推定することができる。
(もっと読む)
解読装置
【課題】二次監視レーダ装置から送信されたモードS信号を正確に復調(解読)する。
【解決手段】モードS質問信号を位相データと振幅データとに変換する変換部14と、振幅データに基づいて、モードS質問信号のP1パルスまたはP2パルスの立上がりまたは立下りの少なくともいずれかのタイミングを検出するパルス検出部15と、検出されたタイミングに基づいて、P6パルスの立上がりのタイミングを特定するとともに、P6パルスの立上りから同期位相反転位置までの位相データをモードS質問信号の位相のずれ量として検出する位相検出部16と、同期位相反転位置からP6パルスの終了までの位相データに対し、位相のずれ量分の補正を施す補正処理部17と、ずれが補正された位相データを復調することで質問データを解読する復調処理部19とを備えている。
(もっと読む)
通信機器及び通信機器の制御方法
【課題】工場出荷時における共振周波数f0の調整工程を省き、工場出荷後のユーザによる使用時において、共振周波数f0を好適に変更する機能を有する通信機器を提供する。
【解決手段】外部機器と所定の周波数で磁界通信を行う磁界アンテナ部50と、磁界アンテナ部50による外部機器との通信状態を監視するCPU72と、CPU72により監視された通信状態に応じて所定の周波数を変更するリアクタンス可変部52を有することを特徴とする。
(もっと読む)
位置検出システム
【課題】移動体側のアンテナが,複数の無線タグと通信しうる距離関係になった場合にも,上記移動体と無線タグとの相対位置を検知出来るようにした位置検出システムを提供すること。
【解決手段】前記複数の無線タグに対して相対的に移動する移動体に搭載され,各無線タグから発信された前記固有の識別情報を含む電波信号を受信する複数のアンテナを備えており,前記通信手段から上記電波信号発信手段への前記通信要求を含む電波信号の送信電力を変化させることによって,1つの電波信号発信手段と上記アンテナとの間で通信可能な限界の送信電力を検出し,検出された1つの電波信号発信手段と各々のアンテナとの間で通信可能な限界の送信電力から演算される各々のアンテナと上記1つの電波信号発信手段との距離の比率から前記アンテナと前記電波信号発信手段との相対位置を検出する位置検出システム。
(もっと読む)
制御対象認識装置
【課題】 自車の走行の障害とならない停止物を対象とする不必要な車両制御が行われるのを防止する。
【解決手段】 反射レベルが閾値以上で前回まで制御対象であると認識されていたゲートが、今回制御対象であると認識されなくなったとき、そのゲートを実際に検知されたものと見なして外挿手段が所定回数(5回)を限度に外挿(○参照)するものにおいて、ゲートが静止物であり、かつゲートの前回(タイム4)検知時の反射レベルおよび今回(タイム5)検知時の反射レベルから予測した次回(タイム6)検知時の反射レベルが検知閾値未満(□参照)である場合には、外挿手段が外挿を行う回数の限度を前記5回から2回に減少させるので、自車の接近に伴って反射レベルが急激に低下して制御対象でないと推定されるゲートの外挿回数を減らし、該ゲートに対する不必要な車両制御が行われるのを防止して運転者の違和感を解消することができる。
(もっと読む)
自動装置
【課題】使用者の状態に応じて複数の動作のいずれかを実行可能とした自動装置を提供する。
【解決手段】放射した送信波の被検知体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、前記送信波と前記受信波とを合成するミキサ部と、前記ミキサ部から出力された検知信号の周波数を検出する周波数検出部と、前記周波数検出部による検出の結果に基づいて制御信号を出力する判定部と、前記制御信号により制御される被制御部と、を備え、前記判定部は、前記検知信号の周波数が降下すると前記被制御部に対して第1動作を実行させる制御信号を出力し、その後、前記検知信号の周波数が上昇または上昇の後に降下すると前記被制御部に対して第2動作を実行させる制御信号を出力することを特徴とする自動装置が提供される。
(もっと読む)
自動装置
【課題】誤動作や誤検知による無駄な動作を防止した自動装置を提供する。
【解決手段】放射した送信波の被検知体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、前記送信波と前記受信波とに基づいて検知信号を生成するミキサ部と、前記ミキサ部から出力された検知信号の周波数を検出する周波数検出部と、前記周波数検出部による検出の結果に基づいて制御信号を出力する判定部と、前記制御信号により制御される被制御部と、を備え、前記判定部は、前記検知信号の周波数が降下し、その後、前記検知信号の周波数が上昇し、または上昇の後に降下し、または略一定値を維持した後に降下すると前記被制御部に対して第1動作を実行させる制御信号を出力することを特徴とする自動装置が提供される。
(もっと読む)
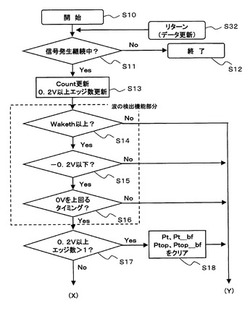
レーダ装置、及び、相対距離検出方法
【課題】FM−CWレーダ装置による至近距離での相対距離検出精度を向上させる。
【解決手段】レーダ波を送信信号として送信し、物標により反射された前記送信信号を受信信号として受信するレーダ装置において、前記送信信号の周波数が上昇と下降とを交互に繰返すように第1の周波数変調を行い、前記第1の周波数変調が行われたときの第1の送信信号と第1の受信信号との周波数差に基づいて前記物標との第1の相対距離を検出する第1の相対距離検出処理を行う相対距離検出手段は、至近距離では、前記送信信号の周波数を切り替える第2の周波数変調を行い、送受信信号により生成される定在波の波数をカウントすることにより、そのカウント値と、前記第2の周波数変調による切り替え前の周波数と切り替え後の周波数の周波数差とに基づき、前記物標との第2の相対距離を検出するので、精度良く相対距離を検出できる。
(もっと読む)
目標信号検出装置及び目標信号検出方法
【課題】目標の位置を予測する閾値を制御することにより、目標を安定して検出することができる目標信号検出装置を得ることにある。
【解決手段】送受波器は、水中に音波を発信し、目標からの反響音を受信処理する。信号処理部は、受信信号が有する複数の要素を抽出し、抽出した特徴素を複数の時系列信号として出力する。信号検出部は、時系列信号の目標らしき信号を抽出し、特徴素を算出する。目標検出部は、時系列信号ごとに目標信号を統合して位置を算出する。目標類別部は、統合された各特徴素に対して重み付けを行い、統合された目標信号の目標らしさの程度を示す確信度を算出する。目標追尾部は、目標の予測位置を算出し、実際に検出した目標との相関を実施する。目標検出最適化処理部は、目標の予測位置を利用し、信号検出部を最適化する。
(もっと読む)
目標検出装置及び目標検出方法
【課題】目標検出性能を向上させることができる目標検出装置を提供する。
【解決手段】アンテナユニット1により予め設定された周期で目標に向けて電波を送信し、目標により反射された電波を受信する。受信信号は、励振受信ユニット2により周波数変換され信号制御回路3を介してデジタル変換される。デジタル変換された受信信号は、信号処理回路4によりFFT処理により周波数スペクトラムに変換される。信号処理回路4は、変換された周波数スペクトラムにおける最大の信号強度と予め決められた目標検出レベルとを比較することにより目標を検出する。この検出において、最大の信号強度が目標検出レベルを下回ると判定された場合は、最大の信号強度に隣接する周波数の信号強度を最大の信号強度に加算して、加算された信号強度が目標検出レベルを超えると判定された場合に、最大の信号強度を有する周波数をもとに目標を検出するようにする。
(もっと読む)
吐水装置
【課題】人の手が吐水口の下に達する直前など、被検知体の動きに応じた最適なタイミン
グで吐水を開始することができる吐水装置を提供する。
【解決手段】吐水部と、放射した電波の反射波によって被検知体の移動に関する情報を取
得するセンサ部と、前記センサ部からの検知信号に基づいて前記吐水部からの吐水を制御
する制御部と、を備え、前記制御部は、被検知体が減速して第1の所定速度以下になった
ことを検知したら、前記吐水を開始させることを特徴とする吐水装置が提供される。
(もっと読む)
物体識別装置および物体識別方法、ならびに物体識別装置を備えた車両
【課題】無線機器などからの電波信号に妨害されること無く、物体からの放射量の検出を正確に行う。
【解決手段】物体から放射される電波領域での放射量を検出する電波イメージング部200と、その放射量の検出信号よりその物体の位置及び形状の情報を抽出する放射強度画像生成部300と、電波イメージング部200内の電波受信素子204の観測周波数帯域を複数の通過帯域に分割する通過帯域可変フィルタ部と、分割された複数の通過帯域毎の検出信号の強度を比較して、無線機器からの電波信号が混在すると判定された通過帯域以外の検出信号を放射強度画像生成部300に処理させる信号記憶演算部203とを備える。
(もっと読む)
吐水装置
【課題】人の手が吐水口の下に達する直前など、被検知体の動きに応じた最適なタイミングで吐水を開始することができる吐水装置を提供する。
【解決手段】吐水部と、放射した電波の反射波によって被検知体の移動に関する情報を取得するセンサ部と、前記センサ部からの検知信号に基づいて前記吐水部からの吐水を制御する制御部と、を備え、前記制御部は、被検知体が減速して第1の所定速度以下になったことを検知したら、前記吐水を開始させることを特徴とする吐水装置が提供される。
(もっと読む)
距離算出装置
【課題】パルスレーダによる測距方式において距離精度を向上させる。
【解決手段】目標をとらえるサンプルゲート処理部2のゲート位置の中心を境に前後に隣り合う進みゲート及び遅れゲートを設定する進みゲート処理部1及び遅れゲート処理部3を備える。信号レベル判定器4及び6は、進みゲート処理部1及び遅れゲート処理部3それぞれから出力されるFFT処理結果をもとに各ゲート内の信号レベルを判定する。距離誤差算出器7は、進みゲート及び遅れゲートにおける信号レベルの判定結果をもとに距離誤差を算出する。サンプルゲート制御器8は、上記算出された距離誤差に基づいてサンプルゲートの位置を制御する。
(もっと読む)
検知装置及び錠制御装置
【課題】動作信頼性や応答性、ユーザの操作性、さらには車両等への搭載性(大きさやデザイン或いは消費電力などの面での優位性)の点で優れた検知装置30(ドアハンドルへの手の接近を検知する装置)を提供する。
【解決手段】大きさの異なる複数の検知エリアA,Bを有し、各検知エリア毎に対象物の接近を検知して検知出力をオンとする電波式の検知装置30であって、前記検知エリアの複数に対する検知出力A,Bが同時期にオンすると、検知結果を否定的とする検知出力修正手段を備えた構成とする。
(もっと読む)
前方障害物検出装置
【課題】前方障害物と同等なレベルの反射波を返す路上静止物を前方障害物として誤検出することを防止する。
【解決手段】本発明の前方障害物検出装置(レーダセンサ部50)は、先行車両が前方物体の上方を通過すると該前方物体を路上静止物とする第1の路上静止物認識部13bと、先行車両が前方物体の前方に存在すると該前方物体を路上静止物とする第2の路上静止物認識部13cと、自車両の車速が所定車速以上かつ前方物体が継続的に検知される2つの他の前方物体の間に存在すると該前方物体を路上静止物とする第3の路上静止物認識部13dと、前方物体が至近距離ではじめて検知されると該前方物体を路上静止物とする第4の路上静止物認識部13eと、前方物体の反射波出力が自車両との距離が所定値に至るまで単調増加し、該距離が該所定値以下になると単調減少する特性を有すると該前方物体を路上静止物とする第5の路上静止物認識部13fとを有する。
(もっと読む)
不審船監視装置
【課題】コスト的及び人的負担が少なく、確実に監視エリアに侵入した不審船を検出することができるようにする。
【解決手段】監視エリアにある船舶に搭載されるレーダ装置から発信されるレーダ波を受信し、受信したレーダ波の受信波形のパターンデータを、そのレーダ波を発信するレーダ装置を搭載する船舶の属性データと関連付けて予めデータベース38に格納し、レーダ逆探装置16によって受信されたレーダ波の受信波形のパターンデータを取得し、該取得したパターンデータとデータベース38に格納された各パターンデータとの比較を行ってマッチングしているか否かの判定を行い、取得したパターンデータとデータベース38に格納された全パターンデータがマッチングしなかったときに、そのレーダ波を発信するレーダ装置を搭載する船舶を不審船と判定する。
(もっと読む)
気象レーダ装置
【課題】 二重偏波を用いた受信エコーの粒子判定を利用して、MTI処理による気象エコーの減衰、消滅の発生及びクラッタの誤検出による算出降雨強度の精度の劣化を限定的なものとし、より精度の高い降雨強度データの算出を行える気象レーダ装置を提供すること。
【解決手段】 観測レンジ又はマトリックス状に観測レンジを分割した観測メッシュごとに降雨強度の算出に使用する受信強度データを選択することより、実際に降雨(雨、雪、雹など)がある観測レンジ又は観測メッシュにはMTI処理受信強度データではなく受信強度データを用い、降雨(雨、雪、雹など)がない観測レンジ又は観測メッシュにはMTI処理受信強度データを用いるので、気象エコーの減衰、消滅の発生及びクラッタの誤検出による算出降雨強度の精度を高く維持できる気象レーダ装置。
(もっと読む)
補正装置、補正方法および補正プログラム
【課題】車両のように対象物が移動する場合であっても、かかる対象物からの反射波を精度よく検出すること。
【解決手段】ミリ波処理装置100は、ミリ波レーダ50からミリ波を出力し、リフレクタを搭載した第1の車両から第1の反射波を取得し、リフレクタを搭載していない第2の車両から第2の反射波を取得する。そして、反射レベル分布比較部130が、第1の車両がミリ波を反射した第1の位置と第2の車両がミリ波を反射した第2の位置とを比較し、第1の位置および第2の位置が所定の距離範囲に含まれる場合に、第1の位置から反射された第1の反射波と第2の位置から反射された第2の反射波とを対応付け(ペアリングを行い)、ミリ波識別部140が対応付けた第1の反射波と第2の反射波との差分を、第1の車両から反射された反射波として反射波記憶部150に記憶する。
(もっと読む)
161 - 180 / 448
[ Back to top ]