
Fターム[5J070AH33]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 包絡線検波を行なうもの(振幅による測定) (448)
Fターム[5J070AH33]に分類される特許
61 - 80 / 448
駐車位置探索システム
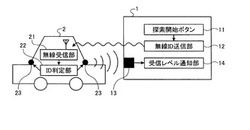
【課題】車両方向を認識できる駐車位置探索システムを得ること。
【解決手段】本発明の駐車位置探索システムにおいて、携帯電子キー1は、探索開始ボタン11と、探索開始ボタン11がONの間、車両2との間で識別可能なIDを含む無線信号を送信する無線ID送信部12と、応答信号を受信する指向性超音波センサー13と、受信レベルを探索者へ通知する受信レベル通知部14とを備え、指向性超音波センサー13は、指向性を有し、車両2方向に向けて応答信号を受信した場合に応答信号を最大受信レベルで受信し、車両2は、無線信号を受信する無線受信部21と、受信した無線信号に携帯電子キー1との間で識別可能なIDが含まれているかを判定するID判定部22と、識別可能なIDが含まれていると判定された場合に応答信号を送信する超音波送信部23とを備える。
(もっと読む)
パルス変調信号特定方法及びパルス変調信号識別方法並びにパルス変調信号識別装置

【課題】 レーダ信号識別装置においてパルス変調信号特定やパルス変調信号識別で行っていた多ビット高レートのA/D変換及びFFT等の大量の計算処理をすることなくビデオパルス信号の特徴を検出し、その特徴を用いてパルス変調信号の識別処理を高性能でより高速に処理することが可能である新規なパルス変調信号特定方法及びパルス変調信号識別方法並びにパルス変調信号識別装置を提供すること。
【解決手段】 パルス変調信号から成る到来電波を包絡線検波して得られるビデオパルス信号を所定の帯域ごとに分離し、その分離した前記ビデオパルス信号のゼロ交差点を前記所定の帯域ごとに所定の範囲内において検出し、前記所定の帯域ごとのゼロ交差点をビデオパルス信号の特徴として前記到来電波のパルス列を特定することを特徴とする。
(もっと読む)
レーダ装置
【課題】クロスレンジプロフィールを用いた類別判定において、目標の観測条件(距離、速度、進行方向)によってクロスレンジ分解能が変化することにより、類別判定結果の信頼性が大きく変化するという運用上の課題がある。
【解決手段】追尾情報から得られた目標の観測条件と、所望のクロスレンジ分解能から、所望のクロスレンジ分解能を得るために必要となる目標観測時間を算出し、これに基づき捜索ビーム及び類別ビームのビームスケジューリングを行う。
所望のクロスレンジ分解能を得るために更に長い目標観測時間が必要な場合は、類別ビームを分割送信することによりクロスレンジ分解能を向上させ、目標の観測条件によらずクロスレンジ分解能を一定にすることにより、類別判定結果の信頼性を一定に保つ。
(もっと読む)
レーダ装置
【課題】衝突危険度の高い物標を確実かつリアルタイムに把握することができるレーダ装置を提供する。
【解決手段】レーダ装置は、レーダアンテナ1と、表示器8と、速度推定部22と、データ発生部6と、を備える。レーダアンテナ1は、水平面内で回転しながらパルス状の信号の送受信を繰り返す。表示器8は、自装置周囲の物標の位置を示すレーダ映像を表示する。速度推定部22は、自装置からの電波の放射方向成分における自装置と物標との相対速度を推定する。データ発生部6は、速度推定部22が推定した前記物標の相対速度に基づいて当該物標の危険度を求める。また、速度推定部22は、レーダアンテナ1が今回受信したエコーと、当該レーダアンテナ1が直前に受信したエコーと、の間の位相変化に基づいて前記相対速度を検出する。そして、表示器8は、前記レーダ映像を表示する際に、危険度が高い物標と低い物標とで表示方法を異ならせることが可能である。
(もっと読む)
レーダー装置
【課題】より正確に障害物を検出可能とするレーダー装置を提供する。
【解決手段】電磁波を照射し、物体により反射された当該電磁波の反射波を受信して当該物体を検出するレーダー装置であって、電磁波を照射する照射手段と、電磁波の照射方向を示す照射軸線を上下方向へ揺動する照射方向揺動手段と、所定のタイミングにおいて、揺動手段を動作させて照射軸線の向きを水平方向以外の方向へ向ける照射方向制御手段とを備える、レーダー装置である。
(もっと読む)
レーダ装置及びそれを用いた電波到来方向の計測方法
【課題】レーダの検出視野内に複数の物体が存在し、それらによる反射波のドップラー周波数が同一となる状況でも、各ターゲットの方位を精度良く求めることが可能なレーダ装置を提供する。
【解決手段】レーダで観測されるドップラー信号を、同一のドップラー周波数を発生させるターゲットごとに分類し、レーダとターゲットとの相対的な位置関係が異なる時刻の反射波のデータを平均化した相関行列を作成し、前記相関行列を用いてレーダ受信器の受信強度パターンの方位角依存性を変化させることによって、ターゲットの方位を計測するレーダ装置。
(もっと読む)
位置検出装置
【課題】 人や物、動物といった種々の対象に適用することができ、簡易なシステム構成で、容易に位置検出できる実用性の高い位置検出装置を得る。
【解決手段】 車載機1は、小電力データ通信可能な無線部11と、無指向性アンテナ部12と、識別情報を含む信号を生成しアンテナ部12を介して全方位に電波出力させる制御部13と、送信側制御部を駆動する操作部14を有し、移動機2は、車載機1の送信電波を受信可能な高指向性アンテナ部22と、受信電界強度を検出する無線部21と、識別情報から受信電波を判別し、受信電界強度から自動車Cとの距離およびアンテナ部22の向きに応じた位置信号を出力する制御部23と、位置信号を受けて自動車Cの遠近情報を表示する表示部25と、位置表示要求信号を出力する操作部24を設ける。
(もっと読む)
侵入検知システム、無線信号監視装置、警報端末、侵入者検知方法、そのプログラムおよび記録媒体
【課題】監視エリア内に侵入した人間の有無を検出し、かつ、検出した人間が該監視エリア内への侵入が許可された人物かを容易に判別可能な仕組みを提供する。
【解決手段】無線LAN用のアクセスポイント101からの無線信号102の電波強度を監視エリア104内のアクセスポイント101から最も離れた位置に配置した無線信号監視装置105にて測定し、あらかじめ定めた電波強度閾値よりも低下した場合、監視エリア104内に侵入者103が侵入したものと判定し、LAN/WAN106経由で警報端末107に通報する。警報端末107はアクセスポイント101にアクセスし、侵入者103が携行する端末109固有の端末情報を取得し、侵入が許可される人物が携行する端末固有の端末情報をあらかじめ登録している端末管理サーバ108にアクセスし、取得した前記端末情報が登録されていない場合、許可されていない不法な侵入者と判定する。
(もっと読む)
レーダ装置、受信機及び相関成分検出装置
【課題】反射信号に相関成分が発生した場合であっても、目標物の探知性能を維持することが可能なレーダ装置及び相関成分検出装置を提供する。
【解決手段】相関成分検出部27−1の解析部273−1及びウェイト係数算出部274−1で、適応復調部272−1から出力される信号のSN比を最大にするウェイト係数を算出する。そして、算出されたウェイト係数を受信データ蓄積部271−1からの信号に掛け合わせ、この信号に対して適応復調部272−1でパルス圧縮を行うようにしている。これにより、反射信号におけるM系統の無線信号の信号成分の相関成分を適応復調部272−1でパルス圧縮して目標物TをCFAR275−1で検出することが可能となる。すなわち、反射信号におけるM系統の無線信号の信号成分に相関が発生している場合であっても、相関成分から目標物Tを検出することが可能となる。
(もっと読む)
車両用レーダ装置
【課題】物体によって異なる電波の反射の強さに影響されることなく、不要な物体に対する誤検出を防止する。
【解決手段】検出波形と基準波形との差分を算出し(S5)、距離hで閾値S以上の強度の差分信号が得られたか否かを判断する。その結果、距離hにおける差分信号の強度が閾値S以上である場合には、路上のマンホールや金属ジョイント等の不要物体からの反射であるとし、距離hにおける差分信号の強度が閾値S未満である場合には、更に、物体検出に要した時間t、または物体を継続的に検出し続けている時間tが車速Vに応じた閾値(L+B)/V以上か否かを判断する。その結果、t≧(L+B)/Vの場合には、通常の警報処理を行い、t<(L+B)/Vの場合、一瞬の検出による不要物体の誤検出であると判断する。
(もっと読む)
距離測定装置
【課題】近距離に存在するターゲットに対する距離測定精度を向上し、誤検出を防止する。
【解決手段】ターゲット200で反射された反射波が受信されると、振幅・位相検出部23で反射波を信号処理し、振幅情報Ampと位相情報θとを距離測定演算部24に出力する。距離測定演算部24は、反射波の振幅信号のピーク位置から時間情報及び位相情報を求め、基準情報として保持されている送信波の時間情報との時間差を求める。更に、この時間差を位相情報で補正し、補正した時間差からターゲット200までの距離Rを算出する。
(もっと読む)
レーダ画像処理装置
【課題】移動体に搭載されたレーダで所定領域を観測し、対象物を検出する時、従来は対象物の高度情報と反射強度を用いていたので、高度と反射強度が同程度の建物や車両等は区別できない。
【解決手段】所定領域内の対象物体までの距離と、そのアジマス方向とエレベーション方向の角度のデータを取得データ入力手段で取得し、取得データから3D画像作成処理手段で3次元画像を生成し、3次元画像中の所定領域を領域設定処理手段で抽出し、所定領域の画像データを用いて、高度断面図作成手段で高度断面図を作成し、高度断面図に検出対象物体が存在するかの判定を物体判定処理手段で行い、検出対象物体が存在する位置を表示手段が表示出力する。
(もっと読む)
レーダ装置
【課題】
リニアFM変調方式パルス圧縮レーダ装置において、尖頭送信電力や送信パルス幅を増
加させることなくレーダ装置の最大探知範囲と最大測定ドップラ速度を拡大する。
【解決方法】
パルス圧縮レーダ装置において、パルス幅内でリニアFM変調を施した変調パルスを送信繰り返し周期毎に周波数掃引方向を反転して空間に発射する。同時に変調パルスと搬送波周波数を異にする無変調パルスを変調パルスの送信繰り返し周期よりも短い周期で空間に発射する。目標からの反射波を変調パルスと同一周波数掃引方向の圧縮係数でパルス圧縮処理する第1のパルス圧縮処理部と、同方向が反転した圧縮係数でパルス圧縮処理する第2のパルス圧縮処理部を設ける。パルス圧縮処理、即ちマッチドフィルタ処理における信号選択性を利用し、一次及び二次エコーを分別、後者を前者の末端に連結し、最大探知範囲を拡大した反射信号を得る。
(もっと読む)
車載レーダ装置、及びターゲット認識方法
【課題】対向車からのレーダを直接受信するような強い干渉電波が生じる場合においても、干渉波の影響を最小限に抑えて、正確な測距や測角ができるレーダ装置を提供する。
【解決手段】レーダ装置の送受信部100は、アンテナ素子101と、アンテナ素子101に対する信号の位相又は振幅の少なくとも一方を調整するウエイト調整部102と、加算部103とを備え、制御部104は、アンテナ部におけるレーダの送信又は受信を切り替える送受信制御部104cと、アンテナ部が受信した干渉波を検出する干渉波検出部104aと、干渉波検出部104aにおいて干渉波が検出された場合には、ウエイト調整部102を制御してアンテナ部における指向性のヌル点の方向を調整するヌル方向制御部104bとを備える。
(もっと読む)
降雨レーダ合成処理装置
【課題】精度を高めることができる降雨レーダ合成処理装置を提供する。
【解決手段】降雨レーダ合成処理装置1は、Xバンドレーダ51の測定領域53を複数のセクタ方向と複数のレンジ方向とに分割した各メッシュMEs,rの平均受信電力Prを算出する初期設定部2と、平均受信電力Prに基づいて、減衰補正項を算出する減衰補正項算出部4と、各セクタにおいて、減衰補正項KIRが基準値KIRstよりも大きいメッシュMEs,rのうち、Xバンドレーダ51に最も近いメッシュのレンジ番号rを減衰開始レンジ番号rstと決定するとともに、平均受信電力Prが閾値ThPrよりも小さいメッシュのうち、Xバンドレーダ51に最も近いメッシュのレンジ番号rを減衰開始レンジ番号rstと決定する複合減衰判定処理部7と、減衰開始レンジ番号rstに基づいて、降雨データを合成する合成処理部10とを備えている。
(もっと読む)
位置情報解析装置、位置情報解析方法、位置情報解析システムおよびプログラム
【課題】無線ICタグの位置情報を高い精度で解析することができる位置情報解析装置を提供する。
【解決手段】位置情報解析装置10は、光学的に識別可能なマーカ21と、IC情報を無線通信により送信するICタグ22と、を一体的に有する識別タグ20との間で無線通信し、ICタグ22からIC情報を含む無線信号を受信する無線通信部111と、無線通信部111が識別タグ20と通信可能な領域の全部または一部を示す画像データを取得する画像取得部113と、画像データに含まれるマーカ21の画像の位置を解析することによりマーカ21の位置を特定し、特定されたマーカ21の位置を示す詳細位置情報を生成し、詳細位置情報を識別タグ20の位置情報として求める画像解析部114と、を備えてもよい。
(もっと読む)
三次元位置推定システム、及び、ダイポールアレイアンテナ
【課題】 精確に受信波の到来方向の推定を行うことが可能なダイポールアレイアンテナ、及び、当該ダイポールアレイアンテナを用いて地中の詳細な三次元位置情報を得ることのできるボアホールレーダシステムを提供する。
【解決手段】 給電線とアンテナ素子間の干渉、或いはアンテナ素子間の共振の影響により受信波の到来方向の推定が困難な第1及び第2周波数帯域と、受信波の到来方向の推定が可能な第3周波数帯域とを有するダイポールアレイアンテナを用いて、当該ダイポールアレイアンテナによる受信波の時間領域波形のうち第1及び第2周波数帯域に係る成分を帯域通過フィルタにより取り除く処理をおこない、当該フィルタ処理後の時間領域波形を解析することにより受信波の到来方向の推定を行う。
(もっと読む)
物体検出装置および物体検出方法
【課題】レーダ装置が検出した物体を精度良くグループ化することのできる物体検出装置および物体検出方法を提供する。
【解決手段】物体検出装置は、車両周辺の物体を検出することによって得られた捕捉点を示す信号を用いて、当該捕捉点それぞれの移動方向を算出する移動方向算出手段と、予め検出対象となる物体の形状に応じた枠および当該物体で想定されている進行方向として当該枠に進行基準方向を設定し、上記捕捉点のうち、上記移動方向に当該進行基準方向を合わせた当該枠内に存在する捕捉点を同じ物体の捕捉点として判定する判定手段とを備える。
(もっと読む)
電波探知装置
【課題】外来ノイズやCWを受信するような環境下においても、到来電波源に対するパルス検出機能が正常に働くようにする。
【解決手段】第1の振幅記憶部41の閾値Th1とTh2の間にノイズ検出閾値Th3を設け、振幅記憶時間測定部80は、第1の振幅記憶部41において振幅電圧の記憶値がノイズ検出閾値Th3を超え、以降一定時間パルス開始閾値Th1を上回らず、またパルス終了閾値Th2を下回らない状態が続いた場合には、閾値設定部70に対して、第2の処理系によるパルス検出処理切り替え指示を出し、閾値設定部70は、上記指示に応じてパルス検出処理を第2の処理系に切り替えると共に、第2の振幅記憶部42のパルス開始閾値Th1’とパルス終了閾値Th2’を第1の振幅記憶部41で測定した振幅電圧の記憶値の最大値を考慮して設定する。
(もっと読む)
電波類別探知装置
【課題】個々の電波諸元では捉えることの難しい電波を識別可能にする。
【解決手段】偏波の異なる複数の素子で構成された空中線で受信された複数の電波送信源からの受信信号を、それぞれデータ番号、受信時刻および各種諸元が付与された離散データに変換するA/D変換手段3と、変換された離散データを信号データリストにして一時保存する一次記録手段4と、信号データリストから各電波諸元に基づいて信号データを抽出し、電波諸元毎の信号データグループを作成する諸元検出手段5と、異なる電波諸元間の信号データグループで構成データを比較し、構成データの合致度に基づいて特定の電波送信源による信号データグループを算出する相関処理手段6を備える。
(もっと読む)
61 - 80 / 448
[ Back to top ]