
Fターム[5J070AH33]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 包絡線検波を行なうもの(振幅による測定) (448)
Fターム[5J070AH33]に分類される特許
21 - 40 / 448
精測進入レーダ、精測進入レーダ制御方法およびその制御用プログラム
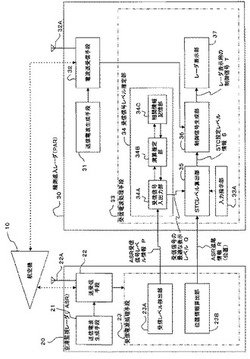
【課題】未知の機種に対してSTCレベルを最適化する。
【解決手段】予め種々の機体について空港監視レーダ20および精測進入レーダ30で測定した反射波の受信信号レベルの相関関係を記憶した相関情報記憶部34Cと、精測進入レーダ30の周波数帯における受信信号の最適な表示レベルを推定する受信信号レベル推定部34を受信電波処理手段33内に備える。空港監視レーダ20で受信した航空機10の反射波の受信信号レベルと相関情報記憶部34Cの記憶内容とによって最適な表示レベルを推定し、この最適な表示レベルおよび空港監視レーダ20から送信された航空機10の位置情報によって未知の機種に対しても最適なSTCレベルをSTC算出部35が算出することを特徴とする。
(もっと読む)
気象レーダ装置及び気象観測方法

【課題】突発的かつ局地的な気象現象を高精度に観測できるようにする。
【解決手段】気象レーダ装置は、複数のアンテナ素子から電波を送信し、位相制御により仰角方向にビーム走査を行って気象目標からの反射波を受信するアンテナユニット11と、前記アンテナユニット11の開口面の仰角と方位角とを駆動する駆動ユニット12と、複数の観測モードにしたがって前記アンテナユニット11及び前記駆動ユニット12により観測範囲と観測仰角とを調整する空中線調整装置5と、前記反射波の受信信号に基づいて前記観測モードを設定する監視制御装置4とを具備する。
(もっと読む)
距離測定装置及び距離測定方法
【課題】構造を簡単にして、2つの送受信装置の間の距離を測定する。
【解決手段】第1送受信装置から、第1基準信号S1に基づいて、第1基準信号の半周期毎に搬送波の周波数又は位相を変化させた第1状態Aと第2状態Bを有した送信信号S5を第2送受信装置に向けて送信する。第2送受信装置において、第1送受信装置からの受信信号を復調して、第1状態と第2状態とを検出する。第1状態と第2状態との受信期間が等しくなる半周期の期間だけ、所定周波数の返送搬送波を第1送受信装置に向けて送信し、第1送受信装置において、送信信号S5を、第2送受信装置から受信した返送搬送波S6により復調して、復調された信号における周波数又は位相に関する異なる2つの状態の期間のうち少なくとも一方の期間の長さに基づいて距離を求める。
(もっと読む)
道路端検出装置
【課題】自車両が走行する道路の道路端を検出する道路端検出装置において、道路端を検出する際の精度を向上できるようにする。
【解決手段】認識システムでは、道路端位置認識処理にて、自車両の進行方向における道路端の候補となる複数の検出点、および自車両の挙動の検出結果を取得する(S110)。そして、自車両が各検出点の真横まで移動したと仮定したときにおける自車両の位置に対する各検出点の位置を表す通過位置を、自車両の挙動に基づいて検出点毎に演算し、演算された各通過位置を、自車両と各検出点との距離に応じて予め設定された単位距離毎に複数のグループに振り分けたヒストグラムを生成する(S120)。このヒストグラムにおいて最も多くの通過位置が振り分けられたグループの代表値を自車両に対する道路端の位置として設定する(S130)。
(もっと読む)
追尾装置
【課題】背景画素の誤抽出を低減し、追尾目標の画像上の大きさや向きの変化に影響を受けない高精度の追尾装置を提供する。
【解決手段】観測センサで同時に観測された同一画角の距離画像と強度画像がフレーム単位で入力され、最新フレーム画像の追尾点情報を入力とし該追尾点の距離画像から得る3次元位置座標と強度画像から得る強度値を観測ベクトルとし追尾フィルタにより次フレームでの追尾目標の状態予測値を出力する追尾フィルタ装置と、前記追尾目標の状態予測値に基づく最新フレーム画像での残差2次形式、追尾予測位置との距離差分、追尾予測強度との強度差分により各画素が目標を構成する確からしさを表す目標画素指標を算出しさらにここから最新フレーム画像での目標を構成する目標領域を抽出し目標領域に含まれる画素から追尾フィルタ装置への新たな追尾点情報を算出して出力する目標検出装置を含む。
(もっと読む)
車両位置探索システム
【課題】車載機器遠隔制御システムの本来の機能に制限を加えることなく、新たなセンサの追加を必要とすることもなく、車両位置探索システムを提供する。
【解決手段】携帯装置10は、無指向性アンテナ17及び指向性アンテナ18を備える。携帯装置10は、ユーザ入力装置11から指示信号が送られたとき、無指向性アンテナ17を用いて第1の車両探索信号を車載装置20に送信し、指向性アンテナ18を用いて第2の車両探索信号を車載装置20に送信する。車載装置20は、第1の車両探索信号の相関値と、第2の車両探索信号の相関値とを取得し、第1の車両探索信号の相関値と第2の車両探索信号の相関値との差がしきい値Aより大きいか否かを判断し、判断結果を携帯装置10に送信する。携帯装置10は、送信された判断結果をユーザ通知装置14に出力する。
(もっと読む)
携帯機検知システム
【課題】比較的簡素な構成で、応答性よく携帯機の位置を検知することができる携帯機検知システムを提供する。
【解決手段】車両の進行方向を長手方向とする第1エレメント21と、車両の進行方向及び鉛直方向に垂直な方向を長手方向とし、第1エレメントに電気的に直列接続された第2エレメント22と、第1エレメント21と第2エレメント22の接続点に一端が接続された迂回配線200とを含むアンテナ20と、第1エレメント21に電力を供給する第1電力供給状態、第2エレメント22に電力を供給する第2電力供給状態、第1エレメント21及び第2エレメント22に電力を供給する第3電力供給状態の、3つの電力供給状態を切り換えると共に、電力供給状態を切り換えた際の携帯機からの応答信号に基づいて携帯機の位置を検知する携帯機検知手段(携帯機検知回路11、CPU12)を備える。
(もっと読む)
誘電率特定装置、誘電率特定方法及び誘電率特定プログラム
【課題】植生等が存在する地域においても、高精度に地表面の誘電率を特定することを目的とする。
【解決手段】ブリュースター角特定部32は、観測対象へ放射した垂直偏波の電波に対する反射波の信号強度を入射角毎にプロットし補間して描かれる線における凹みの底の位置の入射角を、観測対象のブリュースター角として特定する。ブリュースター角は、被観測体の誘電率に応じて異なるため、誘電率特定部33は、特定したブリュースター角から観測対象の誘電率を特定する。
(もっと読む)
SARデータ処理方法及びSARデータ処理システム
【課題】山岳地域のような地形歪みがある地域におけるバイオマス量の推定を可能とする。
【解決手段】地上の標高に係るDEMデータからSARシミュレーション画像データを作成する(S104)。作成されたSARシミュレーション画像データを、SAR画像データに一致させるようにパラメータを選択する(S106)。一致させたSARシミュレーション画像データとSAR画像データとに基づいて、SAR画像データの地形歪み量を算出する(S107)。SARシミュレーション画像データとSAR画像データとに基づいて、SAR画像データの散乱強度を算出する(S108)。SAR画像データに対し、地形歪み量補正及び散乱強度補正を施し、地形歪みがある地域におけるバイオマス量の推定を行う。
(もっと読む)
水稲収量予測モデル生成方法、及び水稲収量予測方法
【課題】圃場にて栽培される水稲の収量予測を現地調査により行うと労力を要し、全国に設置された観測点での気象データによる予測は精度確保が難しく、また、光学リモートセンシングによると天候の影響を受ける。
【解決手段】収量予測式算出部30は、SARを用いて広範囲で得られる生育期前半における標本圃場での後方散乱強度と、現地調査により得られる茎数等の水稲の生育的特徴との相関に基づき収量予測式を生成する。収量算出部34は、収量予測式を用い、生育期前半の対象水稲圃場を撮影したSAR画像により得られる後方散乱強度から水稲の生育的特徴の推定値を求める。水稲の収量構成要素である籾数との間で相関を有する水稲の生育的特徴の推定値から、籾数を予測する。
(もっと読む)
画像処理装置、レーダ装置、画像処理方法および画像処理プログラム
【課題】表示に視覚的な違和感が生じないように代表位置を決定する手法を実現した画像処理装置を提供する。
【解決手段】画像処理部17は、画像メモリ16から入力した画像データとテンプレート画像データとのマッチングを行う。例えば、一致度が最も高いテンプレート画像データを選定する。各テンプレート画像データには、それぞれ位置データが定めれており、画像処理部17は、選定されたテンプレート画像データに対応付けられている位置データに基づいて、入力した画像データの代表点を設定する。
(もっと読む)
レーダ信号処理装置
【課題】本発明は、パルス圧縮レーダにおいて、近距離用と遠距離用との異なる受信信号を合成して所定の信号処理の対象とするレーダ信号処理装置に関し、多様なパルス圧縮レーダの性能、仕様およびターゲットの分布に柔軟に適応し、広範なレンジに亘ってターゲットの探知を安定に実現できることを目的とする。
【解決手段】パルスレーダ方式に適合する第一の受信信号と、前記第一の受信信号とのレンジの対応が図られ、かつパルス圧縮レーダ方式に基づくパルス圧縮の下で得られた第二の受信信号とについて、パルス幅または占有帯域と尖頭電力との積の比に亘ってレベルの差を補正し、前記第一の受信信号に対応する第一の補正信号と、前記第二の受信信号に対応する第二の補正信号とを生成する補正手段と、前記レンジに対応した重みで前記第一の補正信号と前記第二の補正信号とを加算し、後続する信号処理の対象とする合成手段とを備える。
(もっと読む)
位置推定装置及び位置推定方法
【課題】ビームアンテナを利用した位置推定において、高精度に位置推定を行なうことを課題とする。
【解決手段】位置推定装置は、指向性アンテナから出力されるビームの方向を制御し、制御された方向での指向性アンテナから出力されるビームを第1周波数で出力する。また、位置推定装置は、出力されるビームを第1周波数で出力した後に、第1周波数とは異なる第2周波数で出力する。また、位置推定装置は、第1周波数のビームの出力が到達した無線タグを有する端末装置から当該無線タグのIDを取得する。また、位置推定装置は、第2周波数のビームの出力が到達した無線タグを有する端末装置から当該無線タグのIDを取得する。また、位置推定装置は、第1周波数及び第2周波数のビームで共通に取得されたIDを特定し、特定されたIDとビームの方向とを出力する。
(もっと読む)
インパルス信号およびインパルス信号列の検出装置並びに方法
【課題】多重経路環境で実時間無線位置認識システムの応用のためのインパルス信号およびインパルス信号列の検出装置および方法を提供する。
【解決手段】多重経路環境で実時間無線位置認識システムの応用のためにインパルス信号またはインパルス信号列を検出するインパルス信号検出装置は、受信アンテナを介して受信された極超短のインパルス信号から不要な周波数帯域を除去する帯域通過フィルターと、前記不要な周波数帯域が除去された多重経路によるインパルス信号列の包絡線を検出し、前記包絡線の立ち上がりエッジに基づいて前記包絡線に対するデジタル信号を出力するRF/アナログ部と、低速1ビットサンプリングで動作してデータを出力し、フレーム同期を探し或いはレージング遂行命令が検出されると、高速1ビットサンプリングを行ってインパルス信号の伝播時間を計算して出力する信号処理ベースバンド部とを含む。
(もっと読む)
レーダ装置及びレーダシステム
【課題】車載レーダ装置の経時変化、温度変化あるいはレーダカバーに付着した汚れに起因する性能低下を検出し、誤ったデータを出力するのを防ぐ。
【解決手段】1つの送信アンテナと複数の受信アンテナを備え、検知ターゲットの方位角を計測するレーダ装置において、走行中に検知したターゲットからの反射信号を利用して、複数ある受信チャンネル間の利得差と位相差が初期状態から変化していないかを走行中に監視し、変化が大きい場合には異常が起きていると判断する。
(もっと読む)
外部発信受信装置,送受信システム,および送受信方法
【課題】無線型伝送装置の存在位置を検知する。
【解決手段】外部発信受信装置10は、送信信号を送信する。無線型伝送装置20は、外部発信受信装置10からの送信信号を受信すると起動し、送信信号の振幅レベルに応じた振幅レベルの返信信号を送信する。返信信号には、ID情報が書き込まれている。また、外部発信受信装置10は、無線型伝送装置20からの返信信号を受けると、返信信号の状態(誤り箇所数)に基づいて自己と無線型伝送装置との間の距離(通信距離)を求める。
(もっと読む)
レーダ乱気流測定値に対する近接距離からの乱気流の危険性の推定
【課題】航空機搭乗員に乱気流の危険性を伝えるシステムおよび方法を提供する。
【解決手段】気象レーダシステム40は、3次元バッファ43、プロセッサ42、および表示部44を含む。プロセッサは、気象レーダ反射率値を受信し、受信された気象レーダ反射率値を3次元バッファ内に記憶し、記憶されたそれぞれの反射率値に基づいて乱気流値を生成し、それらを3次元バッファのセル内に記憶し、第1の閾値よりも大きい乱気流値を含むように決定された3次元バッファ内のセルから事前定義された閾値距離内に位置するセルに関する第1の表示アイコンを生成する。表示部は、関係するセルが表示用に3次元バッファから選択されるとき、第1の表示アイコンを表示する。前記プロセッサは、他の閾値よりも大きい乱気流値を有するセルの事前定義された閾値内にあるセルに関する他の表示アイコンを生成し、そして出力するようにさらに構成される。
(もっと読む)
電子キーシステムのキー位置判定装置
【課題】電子キーの位置をより精度よく検出することができる電子キーシステムのキー位置判定装置を提供する。
【解決手段】車両の運転席アンテナ及び助手席アンテナから交互に電波を送信して、これら電波を電子キーが受信したときの磁界強度Hd,Hpと電波到来方向Kd,Kpとを算出する。そして、磁界強度Hd,Hpの大小を比較して、電子キーの車外位置を判定する。このとき、磁界強度Hd,Hpのうち高い側が磁界強度範囲Eaに位置して、単なる大小判定ではキー位置を判定できない場合、電波到来方向Kd,Kpの電波角度差θxからキー位置を判定する。電波角度差θxが重複範囲Ebに位置してキー位置を判定できない場合、電波角度差θx及び2つの磁界強度Hd,Hpを繋いだ三角線25を算出し、この三角線25が成す角度θrにより、キー位置を最終判断する。
(もっと読む)
ICタグ交信範囲表示装置およびICタグ交信範囲表示方法
【課題】ICタグの交信距離の校正を簡易に行って、現場環境と交信範囲との整合をとり、交信範囲を表示する。
【解決手段】予め、リーダライタ1の出力強度を最小にして、リーダライタ1とICタグ3との距離を最大交信距離としたときのICタグ3の最小動作電力Rtsと、そのときにリーダライタ1がICタグ3から受信した応答波の受信電力である基準受信電力Rrwsとを、予め実測しておく。次に、リーダライタの出力強度Prwおよびアンテナ利得Gantを、式(4)に適用して、この出力強度Prwのときの推定最大交信距離D’maxが算出される。また、受信電力Rrwと基準受信電力Rrwsとを式(5)に適用して、補正距離dが算出される。そして、アンテナ2とICタグ3との交信距離Dが、式(6)を用いて算出される。
(もっと読む)
パフォーマンスモニタ装置およびパフォーマンスモニタが備えられたレーダ装置
【課題】PM用の送受信回路を簡素化し或いは不要として、構成簡易なPM機能付きレーダ装置を提供すること。
【解決手段】パフォーマンスモニタ(PM)用電波をレーダアンテナが受信するように送信するPM用アンテナと、レーダ送信信号をレーダアンテナへ供給するかPM用アンテナへ供給するかを切り替える切替回路と、レーダ送信信号の一部を取り出す分岐回路と、受信回路で受信処理された信号と分岐回路で取り出された信号に基づいて送信系及び受信系パフォーマンスのチェック処理を行う。
(もっと読む)
21 - 40 / 448
[ Back to top ]