
Fターム[5J070AK24]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 盗難対策 (36)
Fターム[5J070AK24]に分類される特許
21 - 36 / 36
車載用侵入検知装置および検知方法

【課題】盗難と関係の無いような現象に基づく侵入発生の信号を、違法な侵入の場合に発生する信号と区別し、後検出を防止する。
【解決手段】車内に送信した送信波が車内の物体に反射した反射波を解析して車内への侵入を検出する車載用侵入検知装置において、前記反射波の1周期における最大の出力が所定レベル以上である状態が連続して第1の所定時間続かなかった場合、侵入とは認識しないように設定されていると共に、該所定レベル以上である状態の時間計測中は前記反射波が前記所定レベル以下に低下しても該所定レベル以下の継続時間が第2の所定時間以下である場合は前記所定レベル以上である状態の時間計測を継続させるように設定する。
(もっと読む)
移動体測定システム

【課題】 簡易な構成により、被測定物までの距離及び位置を容易に測定することが可能な移動体測定システムを提供する。
【解決手段】 移動体測定システムS1は、被測定物Zまでの距離L1,L2を電波によって測定する複数の距離センサ10a,10bと、複数の距離センサ10a,10bのそれぞれからの測定情報及び複数の距離センサ10a,10b同士の配置情報L0に基づいて、被測定物Zの位置を求める演算部21と、を備える。
(もっと読む)
検出領域の設定装置
【課題】
監視領域を撮影した画像を用いて、監視可能な領域内の床面から高さのある任意の領域を検出処理の対象である検出領域として設定する設定装置を提供する。
【解決手段】監視領域を撮影した画像を表示し、画像上の二次元座標情報を床面上と床面以外とに区別して検出領域を指定するための指定点を入力し、床面上の指定点の二次元座標情報と撮像パラメータおよび床面以外の指定点の二次元座標情報を用いて床面以外の指定点の高さ情報を算出し、床面上の指定点は総て基準の高さ情報とし、床面以外の指定点は前記算出した高さ情報を用いて、画像上の二次元情報を三次元情報の検出領域情報に変換して検出領域情報とする設定装置。
(もっと読む)
撮影制御装置、撮影制御方法、制御プログラム、制御プログラムを記録した記録媒体、撮影制御システム、および情報処理システム
【課題】 RFIDタグを含む物品を所持した人間の撮影をより的確に行うことを可能とする撮影制御装置を提供する。
【解決手段】 物品に取り付けられたRFIDタグの位置情報がリーダライタから受信されると、この情報が物品情報格納部51に格納される。位置判定部35は、指定エリア外となる物品を検出すると、防犯カメラ制御部32による撮影制御が開始される。防犯カメラ制御部32は、該当物品の位置情報の履歴に基づいて該当物品の移動方向を推定し、該移動方向および物品の現在位置に基づいて、撮影動作すべき防犯カメラを特定し、該防犯カメラに対して撮影動作制御を行う。
(もっと読む)
周辺監視装置
【課題】 ドップラーセンサ1を用いて、該ドップラーセンサ1の設置位置周辺に位置する移動物体の動きを監視する場合に、その出力信号に携帯電話等によるノイズが加わった状態であっても、監視すべき移動物体(特に人)の動きを正確に把握できるようにする。
【解決手段】 全バンド幅の周波数レベルの総和を所定時間毎に演算するとともに、該演算された総和に基づいて基準レベル及び異常レベルを設定し、上記演算された総和が上記異常レベルを越えかつ該異常レベルを越えたときから上記第1設定時間経過しても該異常レベル以下とならないとき等には、正常であると判定し、上記総和が上記異常レベルを越えかつ該異常レベルを越えたときから第1設定時間経過しても該異常レベル以下とならないときには、上記基準レベルを、上記第1設定時間内に演算された総和に基づいて設定した新たな基準レベルに更新する。
(もっと読む)
周辺監視装置
【課題】 ドップラーセンサ1を用いて、該ドップラーセンサ1の設置位置周辺に位置する移動物体の動きを監視する場合に、外乱周波数が存在する環境下にあっても、監視すべき移動物体(特に人)の動きを正確に把握できるようにして、該移動物体の車両Cの車室内への侵入等を正確に予測できるようにする。
【解決手段】 FFT解析部13にてFFT解析により周波数レベルが求められた全バンド幅のうち所定の周波数範囲の最大及び最小周波数を含むバンド幅を除く少なくとも1つが、第1の設定レベル以上の周波数レベルとなる特定バンド幅である場合において、該特定バンド幅に対して周波数の高い側及び低い側にそれぞれ隣接する2つのバンド幅の周波数レベルが共に、上記第1の設定レベルよりも低い第2の設定レベル以下であるときには、外乱周波数除去部14にて上記特定バンド幅の周波数レベルを低下させる。
(もっと読む)
飛行時間決定装置及び方法
第1及び第2装置(7,8)は、無線で信号を送受信し、第1及び第2クロックをそれぞれ、信号送信時間及び信号到達時間を決定するために有する。第1装置は第1及び第2信号(9,10)を送信し、第2装置は第3信号(11)を送信する。遅延を第1信号に導入することにより、泥棒は、それらの装置が実際より近いと考えるように装置をだますことができる可能性がある。遅延が第1信号に導入されたかどうかを特定するように支援するように、第1装置は、第1及び第2クロックについてクロックレートの比を演算し、演算された比が所定範囲に入るかどうかを決定する。  (もっと読む)
(もっと読む)
デバイス間距離測定
異なるクロックレートを有しうるクロックを有する第1及び第2デバイス。デバイス間を伝播する信号の伝播距離の指標を得ることは、第1デバイスから第2デバイスにダイ1信号12を送信することを伴う。ターンアラウンドタイムTAT後、第2信号14は、第2デバイスから第1デバイスに送信される。クロック内のあらゆるエラーは、ターンアラウンドタイムTATの測定値のエラーをもたらしうる。デバイスは、LO周波数整合が存在するまで周波数分割比を調整することにより、若しくは、混合された信号の包絡線のオフセット周波数を求めることにより、第1及び第2デバイスのクロックレートの比を算出する回路を含む。クロックレートの比は、ターンアラウンドタイムTATを補償してエラーを緩和するために用いられる。正確な距離の測定値は、リレーアタックが車両セキュリティシステムで発生したか否かを判断するために用いることができる。 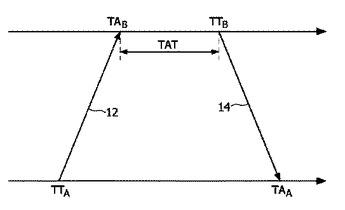 (もっと読む)
(もっと読む)
車上盗難警戒器
【課題】車外と車内とを確実に識別して車外近傍の人の移動や車内侵入に対する盗難警戒を行うことができる車上盗難警戒器を提供することにある。
【解決手段】マイクロ波センサは、マイクロ波アンテナ11によって車内及び車外周辺を検知範囲としてマイクロ波信号を送信するとともに反射されてくるマイクロ波信号を受信して該受信したマイクロ波信号の周波数偏移により移動体を検知する。一方超音波センサは超音波信号を送受波器21によって車内に送波するとともに反射されてくる超音波信号を受波して、受波した超音波信号の周波数偏移から移動体を検知する。両センサにおいて周波数偏移から移動体を検知する回路部は共用回路部3によって構成され、信号処理回路4はこの共用回路部3から出力されるマイクロ波センサの検知信号、超音波センサの検知信号を監視し、その検知信号に基づいて報知器5により報知を行わせる。
(もっと読む)
位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置
【課題】 複数の第1通信装置と第2通信装置とを通信可能とさせる中継装置の位置を検出することができる位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置を提供することを目的とする。
【解決手段】 複数の第1通信装置はそれぞれ第2通信装置との距離を算出するための距離算出用信号を送信する第1送信部と送信したときの距離算出用信号と受信したときの距離算出用信号に応じた信号との位相差を検出する検出部と当該位相差に基づいて距離を算出する算出部とを備え、第2通信装置は距離算出用信号に応じた信号を送信する第2送信部を備え、複数の算出部にて算出された複数の距離が予め定められた距離未満であるか否かを判別する判別部と、予め定められた距離以上であると判別部が判別したときの複数の距離に応じた中継装置の位置を検出する位置検出部と、を有する、ことを特徴とする。
(もっと読む)
距離算出通信装置、距離算出通信装置に用いる距離算出プログラム
【課題】 相手側通信装置との間における当事者以外による不正通信を防止するべく、相手側通信装置との距離を確実に算出することができる距離算出通信装置、距離算出通信装置に用いる距離算出プログラムを提供することを目的とする。
【解決手段】 相手側通信装置との間の距離を算出するための距離算出用信号を送信する送信部と、相手側通信装置から返信された距離算出用信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号と、の位相差を検出する検出部と、検出部にて検出された位相差に基づいて、相手側通信装置との間の距離を算出する算出部と、を備えたことを特徴とする。
(もっと読む)
入退場管理システムにおける共連れ防止方法
【課題】タグ携帯の有無及びそのタグ数の認証と、画像分析による人数カウントとに基づいて正確な入退出者数をカウントするようにしてより高度のセキュリティ管理を行えるようにした入退場管理システムにおける共連れ防止方法を提供すること。
【解決手段】固定側に配置したコントローラCTLと、各種情報などを予め入力したタグT間を光信号及び/又は電波にて送受信した情報と、認証用データベースの情報とに基づいて判定して位置ID及びタグIDを認証し、かつ該認証判定によるカウント数と、カメラによる画像分析の人数カウントとを比較し、その判定結果に基づいてタグ不携帯者の共連れ不正侵入を防止する。
(もっと読む)
物体測位システム、物体測位装置、および物体測位方法
物体(142)の位置を追跡するための物体測位システム(100)は、少なくとも第1の受信機(122)に結合されたコンピュータ(124)を含む基地局(120)を備える。物体(142)にはタグ(140)が取り付けられるが、その信号送信範囲は限定されており、信号は第1の受信機(122)で直接受信するには一般に微弱すぎる。ユーザ(180)は、携帯トランシーバ(160)を身に着けており、タグ(140)から送信される信号の受信圏内に入ると、携帯トランシーバは、物体関連信号を送信して基地局(120)を活性化する。コンピュータ(124)は、ユーザ(180)が身に着けている携帯トランシーバ(160)の位置を決定し、この位置を物体(142)の位置に関連づける。ユーザ(180)がタグ(140)の信号送信圏内から出ると直ちに、物体関連信号の送信は打ち切られ、最後に分かっていた携帯トランシーバ(160)の位置が、物体(142)の新しい位置として使用される。  (もっと読む)
(もっと読む)
物の所在検査
非接触で読取り可能なデータ・キャリア(T1、T2、T3、T4)によって特徴付けられた物(1、2、3、4)の所在を検査する方法において、その所在が検査される物のデータ・キャリアが1つの検査グループ(UG)に割り振られ、非接触で読取り可能な各データ・キャリアは一意にあるいはグループで識別されることができる。データ・キャリア(T1〜T6)はデータ・キャリア読取り手段(5)によって検出され、検出されたデータ・キャリア(T1〜T6)の少なくとも1つが、活性化グループ(AG)に割り振られているかどうかが検出される。検出されたデータ・キャリア(T4、T5)の少なくとも1つが活性化グループ(AG)に割り振られている場合、所在検査が活性化され、その所在検査中に、検査グループ(UG)に割り振られた全データ・キャリア(T1〜T4)がデータ・キャリア読取り手段(5)によって検出されたかどうかが検査され、そうでない場合には警告信号(AL)が伝送される。 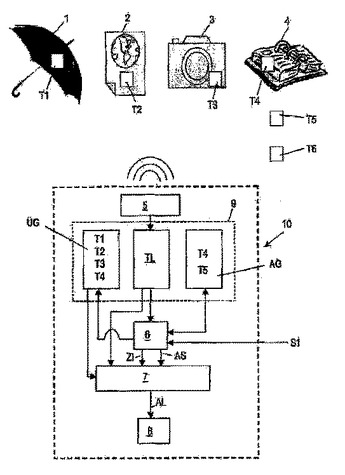 (もっと読む)
(もっと読む)
距離を測定する方法および装置
装置は、同時に送信される2つの成分を備える無線信号を使用して距離を測定する。これら2つの成分はそれぞれ繰返し符号を備え、これら2つの符号は継続時間が異なる。信号を受信すると、その伝搬距離が各コードごとに別々に計算され、比較される。2つの計算結果が同一となる場合にのみ、計算された距離が有効であると見なされる。これら2つの符号の継続時間は、それぞれ互いに素の関係にある2つの数に比例していることが好ましい。信号は、距離計算を実施するのと同一の装置によって生成され送信されて、遠隔装置によって再送信されてその装置に戻される。あるいは、その信号をその遠隔装置によって生成し送信してもよい。 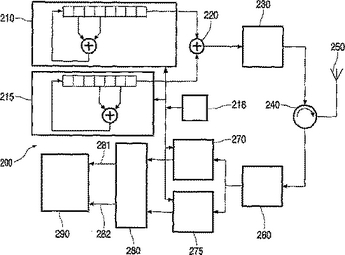 (もっと読む)
(もっと読む)
短いパルス/ステップ周波数のレーダシステム
短いパルス、ステップ周波数、センターライン処理を組合わせた特有のハードウェアアーキテクチャである。本発明のアーキテクチャは短いパルスを送信する送信機と、そのパルスを受信してそれに応答して出力信号を提供する受信機とを有するレーダシステムを構成しており、各パルスは周波数がステップされている。例示的な実施形態では、送信機は周波数ソースと、そのソースに結合されたRFスイッチと、RFスイッチを制御する制御装置とを含んでいる。受信機はセンターラインラフィングフィルタで構成されている信号プロセッサを含んでいる。その信号プロセッサはそれぞれ距離ゲートとデジタルフィルタを有する多数のチャンネルを有している。デジタルフィルタは距離ドップラマトリックスを出力するように構成された高速フーリエ変換を含んでいる。 (もっと読む)
21 - 36 / 36
[ Back to top ]