
Fターム[5J070BC12]の内容
レーダ方式及びその細部 (42,132) | 二次レーダ (1,855) | 質間信号及び応答信号 (481) | →f1と←f2 (38)
Fターム[5J070BC12]に分類される特許
21 - 38 / 38
半導体装置、及び半導体装置を用いた位置検出システム
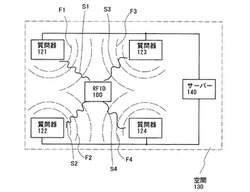
【課題】無線通信を行って、RFIDが空間において存在するか存在しないか、またそのRFIDが所有しているIDなどの情報を取得するほか、そのRFIDの位置を特定する。
【解決手段】複数の質問器とサーバーとをネットワーク接続して、位置検出システムを構築する。RFIDと質問器とで無線通信を行うことで、各質問器からRFIDまでの距離を求め、その距離のからRFIDの位置を求める。質問器からRFIDまでの距離を算出するには、RFIDで質問器から受信した信号の振幅に応じた周波数で信号を発振させる。RFIDで発振している信号の周波数を、RFID内でまたは質問器で検出することにより、質問器からRFIDまでの距離を検出する。
(もっと読む)
無線通信装置

【課題】受信信号に含まれる送信側からの回り込み信号を十分に除去し得る無線通信装置を提供する。
【解決手段】キャンセル信号合成部52へのキャンセル信号の供給を選択的に抑制するキャンセル振幅制御部62と、受信信号入力端64iを選択的に終端させる受信信号終端部50と、信号強度を検出する信号強度検出部78と、その信号強度検出部78により検出される信号強度を記憶する記憶部82と、その記憶部82から読み出される複数種類の信号強度を比較する信号強度比較部80と、その信号強度比較部80による比較結果に基づきキャンセル信号の振幅、位相を制御するキャンセル信号制御部72とを、有することから、キャンセル振幅制御部62によりキャンセル信号を抑制することで受信信号の強度を正確に検出できる一方、受信信号終端部50により受信信号を終端させることでキャンセル信号の強度を正確に検出できる。
(もっと読む)
無線タグ、リーダライタ装置及び異常状態検出システム
【課題】検出対象物の異常な状態を精度よく簡単に検出することができる無線タグ、リーダライタ装置及び異常状態検出システムを提供する。
【解決手段】(A)に示すように、橋梁Bが正常な状態であるときには、アンテナ線2eから周波数f1の信号S1が送信されるとともに、アンテナ線2fから周波数f2の信号S2が送信される。一方、(B)に示すように、橋梁Bに亀裂Cが発生して橋梁Bが異常な状態になると、亀裂Cによってアンテナ線2eが破断する。その結果、アンテナ線2eから周波数f1の信号S1が送信されず、アンテナ線2fから周波数f2の信号S2のみが送信される。その結果、信号S1,S2を受信したときには、橋梁Bが正常な状態であると判定することができるとともに、アンテナ部が信号S2のみを受信したときには、橋梁Bが異常な状態であると判定することができる。
(もっと読む)
位置情報特定部材
【課題】本発明の目的は、簡単に設置できて、屋外でも室内でも電波障害を受けることなく位置情報を正確に特定できる位置情報特定部材を提供することにある。
【解決手段】本発明は、読取装置によって読取り可能な固有の認識コードを有する多数の素子が、シート状部材又は網目状部材に規則的に一体に装着されていることを特徴とする位置情報特定部材にある。
(もっと読む)
パラメトリックリフレクティブ技術を用いたRFIDシステム
【課題】無線周波数アンテナを用いて情報を符号化および復号するシステムおよび方法を提供すること。
【解決手段】本RFIDシステム10は、少なくとも一つ以上のインテロゲータ装置とRFIDデータタグを備える。RFIDデータタグは、基板または物体に直接形成された複数のアンテナ素子を有する。アンテナ素子は、配向と、偏波および位相情報を提供する寸法とを有しており、この情報はRFIDタグ200の符号化された情報を表している。インテロゲータ装置は領域をスキャンし、レーダーイメージング技術を用いてスキャン領域の画像を生成する。この装置は、データタグのアンテナ素子から再放射されたRF信号を受信する。データタグは画像に表されることが好ましい。再放射されたRF信号は、各アンテナ素子の偏波および位相情報を含むことが好ましく、この情報からRFデータタグ200の情報を復号するため、レーダー信号イメージングアルゴリズムを用いる。
(もっと読む)
衛星試験装置
【課題】 衛星組立後の地上試験や、衛星運用時の動作試験の際に、衛星内部でのコンポーネントの接続確認と、各コンポーネントの動作確認を効率的に行う。
【解決手段】 従コンポーネントのテスト動作処理部から主コンポーネントのテスト動作処理部と地上試験装置に対してテスト用のテレメトリを送信し、主コンポーネントで中継されたテスト用のテレメトリと、従コンポーネントから直接送信されたテスト用のテレメトリとの一致比較を行うことによって、コンポーネントの接続状態や動作状態の健全性を確認する。
(もっと読む)
無線局間距離測定方式
【課題】限られた周波数帯域において,しかも単調な周期性信号を使って,移動局と固定局の間,あるいは移動局間の相対的距離を電波で直接測定することを可能とする。
【解決手段】無線局1の送信手段103が第1の波と第2の波を無線局2に送信し,無線局2の周波数位相シフト手段202が,受信したそれぞれの波の周波数と位相をシフトして第3の波と第4の波を生成し,送信手段203がそれぞれの波を無線局1に送信する。無線局1の周波数位相シフト手段105が,受信した第3の波と第4の波から第5の波を生成する。ここでクロック信号発生手段107が第1の波と第2の波から生成した第6の波と同期したクロック信号を生成し,このクロック信号によって動作するフィルタ108を用いて第5の波を抽出する。測定手段106が第5の波と第6の波の位相差に基づいて,無線局1と無線局2の間の電波の伝搬時間を測定する。
(もっと読む)
侵入・障害物検出装置及び無給電応答装置
【課題】侵入・障害物の誤認識を減少させ、低消費電力を可能とする検出装置を提供する。
【解決手段】本検出装置は、検知装置と応答装置とを有し、上記応答装置は、検知装置から受信した電波の周波数のうち特定の周波数以外の周波数をフィルタリングするフィルタと、フィルタを通過した特定の周波数の電波を増幅することなく検知装置に対して送信するアンテナとを有する。また、上記検知装置は、基準となる周波数及び特定の周波数を含む複数の周波数の電波をアンテナから応答装置に対して送信させる発信手段と、特定の周波数の電波の受信の有無と基準となる周波数の電波の受信の有無とに基づき侵入又は障害物の有無を判断する判断手段とを有する。応答装置は増幅することなく特定の周波数の電波を送信するため、消費電力を抑えることができ、無給電でも可能である。さらに、検知装置は、ほとんどのケースを取り扱うことができる。
(もっと読む)
デバイス間距離測定
異なるクロックレートを有しうるクロックを有する第1及び第2デバイス。デバイス間を伝播する信号の伝播距離の指標を得ることは、第1デバイスから第2デバイスにダイ1信号12を送信することを伴う。ターンアラウンドタイムTAT後、第2信号14は、第2デバイスから第1デバイスに送信される。クロック内のあらゆるエラーは、ターンアラウンドタイムTATの測定値のエラーをもたらしうる。デバイスは、LO周波数整合が存在するまで周波数分割比を調整することにより、若しくは、混合された信号の包絡線のオフセット周波数を求めることにより、第1及び第2デバイスのクロックレートの比を算出する回路を含む。クロックレートの比は、ターンアラウンドタイムTATを補償してエラーを緩和するために用いられる。正確な距離の測定値は、リレーアタックが車両セキュリティシステムで発生したか否かを判断するために用いることができる。 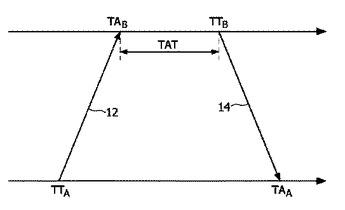 (もっと読む)
(もっと読む)
無線タグと読取装置
【課題】非接触で水などの存在を検知できる、センサ機能を有する無線タグを実現する。
【解決手段】読取装置2から無線タグ1に向けて検知対象となる物質に吸収され難い周波数の電磁波を送信して無線タグ1の電力源とし、吸収され易い周波数の電磁波を第1の送信手段10により読取装置2へと送信し、その電磁波の強度を電磁波強度測定手段20にて測定する。
(もっと読む)
位置監視デバイス
【課題】より信頼できる位置監視デバイスを提供すること。
【解決手段】位置監視デバイスは、第2の部分1又は2に対する第1の部分2又は1の位置を確認する位置監視デバイスであって、質問信号を送信し、かつ質問信号に応答して応答機3によって送信され得る応答信号を受信する送受信機5を第1の部分に有している。位置監視デバイスは、応答機3と送受信機5との間で信号を減衰するスクリーン4を備え、送受信機5、スクリーン4、および応答機3から成る群のうち2つの構成要素が相互に対して可動である。
(もっと読む)
無線タグ検出システム
【課題】 送信電波の相互干渉を好適に防止しつつ所定の領域内における無線タグを好適に検出する無線タグ検出システムを提供する。
【解決手段】 複数の据置式無線タグ通信装置12と携帯式無線タグ通信装置14とが互いに異なるタイミングで送信信号を送信するように制御する送信制御部146を含むことから、時分割で前記送信信号を送信することで、前記複数の据置式無線タグ通信装置12から送信される送信電波と携帯式無線タグ通信装置14から送信される送信電波との干渉が好適に防止される。すなわち、送信電波の相互干渉を好適に防止しつつ所定の領域内における無線タグ16を好適に検出する無線タグ検出システム10を提供することができる。
(もっと読む)
ベースステーションと可動対象物との間の距離を決定するための方法及びその方法のためのベースステーション及び確認システム
【解決手段】本発明は、ベースステーション(SLG)と可動対象物(DT1〜DT3)との間の距離を決定するための方法、特に例えば発送システム、輸送システム又は製造システムにおける物体に関連する状態データ及びプロセスデータ又はそのいずれか一方を検出するため物体に取付けられた可動対象物としての少なくとも1つの可動データメモリを有する確認システムにおける距離決定方法に関する。本発明方法においては、高周波搬送周波数(fo)とオフセット周波数(df)とがIQ変調のために設定される。高周波搬送周波数は時間的に順次オフセット周波数だけ高められ、また低められることにより、変調された高周波搬送信号(TS)に生じる高周波搬送ベース周波数(fo+df、fo−df)が周波数変化の際同位相を有する。高周波搬送信号(TS)は引き続いて送出され、同時に、移動対象物により後方散乱された高周波搬送信号(RS)は搬送波位相信号(PS)と混合される。両高周波搬送ベース周波数(fo+df、fo−df)に対し、所属の搬送波位相(PH1、PH2)が時間的に順次求められ、次いでその差(dPH)からベースステーションと各移動対象物との間の距離が決定される。  (もっと読む)
(もっと読む)
無線通信装置
【課題】可変移相器を比較的簡素な構造で実現でき、またアンテナの素子数が増大した場合も安価に回路全体を構築できる無線通信装置を提供する。
【解決手段】第1正弦波信号及びこの第1正弦波信号と位相が異なる第2正弦波信号を発生させる第1送信信号D/A変換器42及び第2送信信号D/A変換器43と、この正弦波発生手段で発生した第1及び第2正弦波信号それぞれの振幅を制御する可変減衰器85,86と、この振幅制御された第1正弦波信号及び第2正弦波信号を合成し、無線通信用の合成正弦波信号を生成する加算器87とを有する。
(もっと読む)
自動駐車システム
【課題】 自動駐車のための設定を駐車場以外の場所で、駐車場の環境に依存せずに設定可能であり、かつ、車両が駐車場に近付いた時点で自動駐車モードに入れる利便性の高い自動誘導システムを提供すること。
【解決手段】 電波マーカ2は、駐車スペースおよびその周辺に複数設置され、それぞれ位置情報を有する。検出器1は電波マーカ2と無線通信が可能であり、現在位置を取得する現在位置取得部17と、駐車スペースの寸法や複数の電波マーカ2の配置位置を示す配置情報を記憶する設定記憶部16と、受信アンテナ13a、13b、13cで受信した信号の信号レベルに基づいて電波マーカまでの距離を検出して電波マーカの位置を取得し、複数の電波マーカ2の位置を取得することにより配置情報を参照して現在位置と複数の電波マーカ2の配置との位置関係を特定する位置検出部18とを備える。自動運転制御装置3は特定された位置関係に基づいて車両の自動駐車を行う。
(もっと読む)
移動速度測定方法及び移動速度測定方式
【課題】限られた周波数帯域において,しかも単調な周期性信号を使って,移動局と固定局の間,或いは移動局間の相対的な移動速度を直接測定することを可能とする。
【解決手段】無線局1の送信手段103が周波数f1 の第1の波と周波数f2 の第2の波を無線局2に送信し,無線局2の周波数シフト手段202が,受信したそれぞれの波の周波数をシフトし,第1の波から周波数f3 の第3の波を,第2の波から周波数f4 の第4の波を生成し,送信手段203がそれぞれの波を無線局1に送信し,無線局1の周波数シフト手段105が,第1の波〜第4の波の,相異なる2組の2つの波を用い,それぞれ周波数をシフトして,周波数差が第1の無線局と第2の無線局間の相対移動速度に起因するドップラー効果で決められる第5の波と第6の波を生成し,測定手段106が,第5の波と第6の波の周波数差に基づいて,無線局1と無線局2間の相対移動速度を測定する。
(もっと読む)
距離測定方法及び距離測定方式
【課題】限られた周波数帯域において,しかも単調な周期性信号を使って,移動局と固定局の間,或いは移動局間の相対的距離を電波で直接測定することを可能とする。
【解決手段】無線局1の送信手段103が周波数f1 の第1の波と周波数f2 (f2 ≠f1 )の第2の波を無線局2に送信し,無線局2の周波数位相シフト手段202が,受信したそれぞれの波の周波数をシフトし,第1の波から周波数f3 の第3の波を,第2の波から周波数f4 (f4 ≠f3 )の第4の波を生成し,送信手段203がそれぞれの波を無線局1に送信する。無線局1の周波数位相シフト手段105が,第1の波〜第4の波の,相異なる2組の2つの波を用いて,それぞれ周波数および位相をシフトし,周波数が同じで位相が異なる第5の波と第6の波を生成し,測定手段106が,第5の波と第6の波の位相差に基づいて,無線局1と無線局2間の電波の伝搬時間を測定する。
(もっと読む)
TDOA分散アンテナを使用したターゲットの位置特定方法及び装置
本発明は、分散アンテナを使用してターゲット(5)の位置を特定するための装置と方法である。アンテナは、既知の位置に設けられた複数の受信要素(4,6,6)からなる。受信要素の少なくとも1つは送信器(4)でもあり、呼掛け信号(7)をターゲット(5)に送信する。ターゲット(5)からの返信信号(8)は複数の受信要素(4,6,6)によって受信され、ターゲットの位置を、返信信号(8)の到達時間及び呼掛け信号(7)の送信と返信信号(8)の受信との間の往復遅延を使用して計算する。 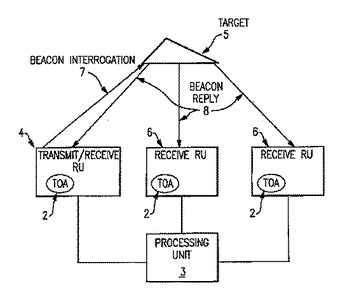 (もっと読む)
(もっと読む)
21 - 38 / 38
[ Back to top ]