
Fターム[5J070BD10]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | その他 (106)
Fターム[5J070BD10]に分類される特許
41 - 60 / 106
車載用探知機
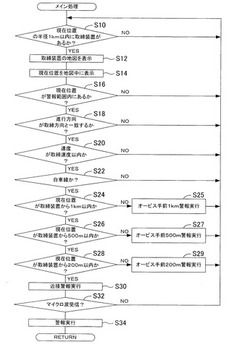
【課題】 警報されたときに、運転者が取締装置を長時間探すことを防止するができる車載用探知機を提供する。
【解決手段】 このレーダー探知機では、警報(S25、S27、S29、S30)とは別に、取締装置の設置位置、及び、道路、現在位置が示された地図がモニタに表示される(S12)ので、誤報等があっても、運転者は、この地図を基に、取締装置を直ちに探し当てることができる。
従って、このレーダー探知機では、取締装置に近づいたことを知らせる警報がなされても、運転者は取締装置が設置された道路が自車線か否かを直ちに判別することができるので、取締装置が自車線に設置されているものか否かを確認するために、運転者が長時間取締装置を探してしまうことを防止することができる。
(もっと読む)
携帯型位置検出装置

【課題】 従来と異なる新規な携帯型位置検出装置を提供する。
【解決手段】 位置検出装置により現在位置(位置情報)を検出し、その位置情報を算出した時点の時刻情報をICタグに書き込むとともに、そのICタグ30を窓部7を介して読取可能な状態とする。これにより、携帯電話が有するタグリーダを用いてICタグ30の情報を読み込み、その読み込んだ情報(客先名、要件及び時刻)を営業所のコンピュータに送信すれば、営業所のコンピュータに客先名、要件及び時刻が記憶されるので、容易に日報を作成することができる。
(もっと読む)
パッシブレーダ装置
【課題】利用可能な直接波と反射波の組が1つであっても、反射位置が容易に推定できるパッシブレーダ装置を得る。
【解決手段】送信機から送信される信号を受信する信号受信部101、信号受信部101で受信した信号を用い、送信機から直接到達する直接波と反射物により反射されて到達する反射波との伝搬遅延時間差および直接波と反射波との位相差の算出を行うと共に、送信機および信号受信部の位置を取得する測位演算部102、送信機から平面波が送信され、かつ反射波が平面で反射されていると仮定した場合の幾何学的な制約条件に基づき、測位演算部102で算出した上記伝搬遅延時間差より得られる経路差と、測位演算部102で算出した上記位相差より得られる位相差の変化率とを用いて、反射波の反射位置を推定する反射位置推定部103、並びに推定した反射位置を表示する表示部104により、パッシブレーダ装置100を構成する。
(もっと読む)
航空機通信システムとそのアンテナ指向制御方法
【課題】ロストした航空機の位置を予測して通信アンテナを航空機に指向させ、通信を再開させる。
【解決手段】衛星基地局S2から得られる位置情報、航空管制システム20で得られる位置情報、飛行計画書から得られる位置情報を入手し、直接通信が途絶えたとき、優先度判定を行って精度の高い順序で位置情報を予測アルゴリズムA2による予測処理を実行する。この予測アルゴリズムA2では、航空機Tが時刻t1の位置Aにて速度vで移動している状態でロストしたとすると、時刻t2の位置を予測し、さらに現在時刻tとの伝送時間差とアンテナ動作時間を演算し、時間差分の位置ずれを予測位置Bに反映させ、この予測位置情報を基に、通信アンテナ装置11の航空機Tの予測位置Bの方向を計算し(A3)、この計算結果から通信アンテナ装置11の指向方向(方位・仰角)を駆動制御して航空機Tの予測位置Bの方向にビームを形成する。
(もっと読む)
位置情報通知装置
【課題】 使い勝手に優れ、しかもランニングコストの低減を図ることができる位置情報通知装置を提供する。
【解決手段】 装置本体1の電源として充電式電池2を使用し、また、装置本体1にACアダプタ8を接続可能とし、充電式電池2を満充電まで充電し、次の使用を可能にした。また、組み込まれる充電式電池2として、10C以上の電流で急速充電できるリチウムイオン二次電池が用いられことも特徴としている。
(もっと読む)
情報端末
【課題】位置精度を維持することが困難な環境条件下であっても、精度の高い位置精度を算出し、維持する情報端末を提供する。
【解決手段】位置情報及び信頼度情報を取得する取得手段を備える情報端末であって、前記位置情報及び信頼度情報を取得する取得手段を備えた他の情報端末と交信し、該情報端末の位置情報および信頼度情報を取得又は交換する他端末情報取得手段と、前記他端末情報取得手段より取得した前記位置情報と前記信頼度情報と、前記取得手段により取得した前記位置情報と前記信頼度情報とを用いて、新たな位置情報と信頼度情報を算出する算出手段と、を備え、前記他の情報端末と交信する毎に、前記算出された位置情報と信頼度情報を更新する。
(もっと読む)
不審船監視装置
【課題】コスト的及び人的負担が少なく、確実に監視エリアに侵入した不審船を検出することができるようにする。
【解決手段】監視エリアにある船舶に搭載されるレーダ装置から発信されるレーダ波を受信し、受信したレーダ波の受信波形のパターンデータを、そのレーダ波を発信するレーダ装置を搭載する船舶の属性データと関連付けて予めデータベース38に格納し、レーダ逆探装置16によって受信されたレーダ波の受信波形のパターンデータを取得し、該取得したパターンデータとデータベース38に格納された各パターンデータとの比較を行ってマッチングしているか否かの判定を行い、取得したパターンデータとデータベース38に格納された全パターンデータがマッチングしなかったときに、そのレーダ波を発信するレーダ装置を搭載する船舶を不審船と判定する。
(もっと読む)
無線通信による移動端末の検出システム
【課題】 消費電力、無線の帯域、位置計算処理能力等のリソースにマイナスの影響を与えることなく、位置の精度を向上させることを可能とする無線通信による移動端末の検出システムを実現する。
【解決手段】 移動端末から周期的に送信される無線信号を、固定配置された基地局が受信する無線通信による移動端末の検出システムにおいて、
前記移動端末に加速度センサを設け、この加速度センサの検出値に基づいて前記無線信号の送信周期を変更する。
(もっと読む)
物体探知装置
【課題】探知エリア内の物体の探知を自動的に行うことでユーザの負担を軽減することができる物体探知装置を提供する。
【解決手段】物体探知装置は、電磁波を送受波するアンテナ部3を含む装置本体4を基準面に沿って自動的に移動させる自動移動手段10と、物体を探知した位置を記録する記録手段9とを備える。自動移動手段10は、探知エリアを設定する探知エリア設定部21と、探知エリア内での装置本体4の移動経路となる探知経路を決定する経路生成部22と、探知エリア内での装置本体4の現在位置を認識する位置認識部14と、装置本体4を移動させる駆動手段23と、前記探知経路に従って装置本体4が移動するように駆動手段23を制御する駆動制御部24とを有する。
(もっと読む)
車両用警報装置
【課題】 速度検出装置が設置されている位置を通過してもすぐに運転が漫然となって事故につながることを防止する車両用警報装置を提供する。
【解決手段】 S12では、速度検出装置が車両の速度を検出する検出位置を通過する手前側に第1警報エリア、車両が検出位置を通過側に第2警報エリアが設定される。S14では、車両の現在位置が第1あるいは第2警報エリア内か否かを判定する処理が実行される。S16において、車両の速度が走行路の制限速度以上であると判定されると(S16:YES)、警報音がスピーカ29から出力される(S18)。この車両用警報装置1では、速度検出装置の手前でも警報がなされるが、運転者が速度検出装置を目で確認し、速度検出装置を通過した後も警報が発せられるので、速度検出装置が設置されている位置を通過してもすぐに運転が漫然となって事故につながることを防止することができる
(もっと読む)
埋設物探知センサ
【課題】磁気センサの検出感度を向上させた複合型の埋設物探知センサを提供する。
【解決手段】受信部16及び送信部18からなる磁気センサ12と電波センサ14を備え、電波センサ14を構成する複数のアンテナ要素を受信部16の外周上に配置し、さらに受信部16を中心として、電波センサ14の外周上に送信部18を配置した埋設物探知センサ10である。受信部16は、一対の半円形状のコイル20を対称に組み合わせて円形とし、コイル20のコイルパターン方向を互いに反対に形成した。
(もっと読む)
物体検知装置
【課題】基準走査方向に存在する物体の検知可能距離を確保し、かつこの基準走査方向から外れた位置に存在する物体の検知能力を確保することができる物体検知装置を提供する。
【解決手段】レーダ装置1は、水平方向に分割した検知領域毎に、その検知領域における存在を検知したい物体の距離範囲に応じて垂直方向の走査範囲を変化させる。例えば、水平方向における基準走査方向を正面前方に決定している場合、この基準走査方向から離れるにつれて、レーザ光の垂直走査範囲を大きくする。これにより、レーダ装置1は、水平方向における走査角度毎に、その走査角度において、存在を検知したい物体の距離範囲で、垂直方向におけるレーザ光の照射範囲をほぼ同じにする。
(もっと読む)
三次元センサのデータ補正装置及び方法
【課題】陸上に三次元センサを設置し、海面上の物体を検知・計測する場合に、基準平面を自動で補正でき、三次元センサをそれぞれ別の位置に設置し、複数の三次元センサを併用する場合に、各センサの座標系を共通のグローバル座標系に自動で調整できる三次元センサのデータ補正装置及び方法を提供する。
【解決手段】緯度・経度取得手段22、日時取得手段24、潮位計算手段26、および三次元座標補正手段28を備え、潮位計算手段26で算出した潮位を用いて三次元センサ10の座標データを補正する。また方位取得手段32、および三次元座標基準設定手段34を備え、緯度・経度、方位、水準面からの高さ、水準面からの傾き量(ピッチ、ロール)が把握できるため、グローバル座標系自身の三次元座標の基準を、グローバル座標系に合うよう自動設定する。
(もっと読む)
情報処理装置及び情報処理方法及びプログラム
【課題】航空機や人工衛星等の移動プラットフォームに搭載され、地表面の高分解能画像及び高度情報を得る干渉型合成開口レーダ装置において、自機高度の測定誤差による地表面の高度情報の誤差を推定して補償することを可能とした干渉型合成開口レーダ装置を提供する。
【解決手段】機体の機軸と直交する平面内で直線状に3つ以上のアンテナ1〜3を配置し、この3つのアンテナで受信されたパルス信号及び動揺センサ4の計測結果を用いて3つの合成開口レーダ画像7を取得し、更に、3つのレーダ画像から2つの観測領域の高度情報9を取得し、2ベースラインによる誤差推定部10が、この得られた高度情報の差分から誤差を推定して補償し、インタフェロメトリ再処理部11が、再度干渉型合成開口レーダの処理を行うことにより、地表面の高度誤差が抑圧された誤差抑圧後の観測領域の高度情報12が得られる。
(もっと読む)
車載用レーダ装置
【課題】先行車との車間距離を目標車間距離に維持すべく自車の制駆動力を制御する機能を備えるACCシステムにおいて、S字カーブ等においても、先行車を適確に捕捉しえるようにする。
【解決手段】ヨーレートセンサおよび車速検出手段の検出信号に基づいて自車の進行方向に沿う曲率を推定する手段23、自車進行路の車線幅を設定する手段24、自車進行路の曲率と車線幅とから自車進行路の車線形状を設定する手段25、前方車の位置を検出する手段21、自車進行路の車線形状上の最も近い前方車を所定の車間距離を保つべき対象の先行車と確定する手段26、ヨーレートセンサの検出誤差を補正する手段(ヨーレートの検出値=推定曲率に対応するゲイン×ヨーレートの出力値に補正する手段31)、を備える。
(もっと読む)
車載用レーダ装置
【課題】先行車との車間距離を目標車間距離に維持すべく自車の制駆動力を制御する機能を備えるACCシステムにおいて、S字カーブ等においても、先行車を適確に捕捉しえるようにする。
【解決手段】ヨーレートの検出信号と車速の検出信号とから自車の進行方向に沿う中心線の曲率を推定する手段23、自車の進行方向に沿う曲率とその中心線に与える水平方向の車線幅とから自車進行路の車線形状を設定する手段25、前方車との距離および角度を検出する手段21、自車の進行方向に沿う曲率と前方車との距離に応じて車線形状の水平方向の車線幅を変更する手段(図8のS8)、自車進行路の車線形状上の最も近い前方車を所定の車間距離を保つべき対象の先行車と確定する手段26、を備える。
(もっと読む)
解釈型航空機搭載型レーダ・マップの生成の方法およびシステム
【課題】飛行機レーダシステムから陰になっている地上特徴(地形/障害物)を識別して一意に表示するシステムおよび方法を提供する。
【解決手段】例示的なシステムは、1又は複数の航空機情報源と、3次元地形/障害物データを格納するデータベースと、表示装置と、1又は複数の航空機情報源およびデータベースとデータ通信するプロセッサとを含む。プロセッサは、1又は複数の航空機情報源から、航空機位置、飛行方位及び高度情報を受信する。プロセッサは、受信された航空機位置、飛行方位及び高度情報に基づいて、3次元デジタル空間のベクトルを、データベースに格納された3次元地形/障害物データに投影して、その投影されたベクトルが1より多い地形特徴と交差するかを判断する。その特徴がそのベクトルと交差するものであり、且つそのベクトルと交差する別の特徴よりも更に航空機から離れている場合に、表示装置に一意に表示される。
(もっと読む)
レーダ装置
【課題】温度変化や経年変化によらず到来波数を安定した精度で推定可能なレーダ装置を提供する。
【解決手段】受信信号遮断状態のデータDaを取得し、当該装置の内気温度Tcを測定し、データDaをFFT処理することで、回路ノイズ分を表すパワースペクトルPSaを算出し、次式に従って、パワースペクトルの周波数[bin]毎に、ノイズ閾値TH(n)を算出する(S210〜S240)。但し、αは係数(0<α<1)、TH(n−1)は前サイクルで算出されたノイズ閾値である。
TH(n)=(1−α)×TH(n−1)+α×(PSa+Poffs+K×Tc)
このノイズ閾値TH(n)を用いて、パワースペクトル中のピークの検出、方位推定で使用する固有値の識別を実行する(S260〜S270)。
(もっと読む)
物品管理システム及び物品管理方法
【課題】物品に添付された検知材の種類に応じて検知材の色を物理情報に変換し、適切な物品管理を行う。
【解決手段】ICタグ101の内部に存在する記録領域から前記検知材種別情報を読み取り、読み取った検知材種別情報に応じて、色を物理情報へ変換する物理情報変換手段を選択する。次に、検知材の示す色を測定し、該検知材の示す色を前記選択された物理情報変換手段によって物理情報に変換する。そして、前記物理情報とICタグアクセス手段2によって読み取られたID情報を関連付けてID物理データを形成し、物理データ管理手段601に対し該ID物理データを記録する。
(もっと読む)
マット位置表示システム
【課題】本発明は、マット内にGPS位置情報及びICタグ情報を取り入れ、各情報を送信可能な信号処理をしてアンテナを介して送信させ、基地局では専用受信機で受信し、それら各情報をパソコン画面に表示できるマット位置表示システムを提供する。
【解決手段】本発明のマット位置表示システムは、衛星から送信されるGPS位置情報を電柱や屋上などに取り付けられたアンテナにより得て、重要拠点のマット内にあるGPS機器類にGPS位置情報を送り、一方重要拠点のマット内に仕組んだICリーダーによりマット上を通行したICタグを装備した人又は物のICタグ情報を得て、マット内部にあるGPS機器類に入力し、GPS情報とICタグ情報を送信可能な電波にミキシングをして、同軸ケーブルよりアンテナを介して送信させ、基地局では専用受信機で受信し、それら各情報を電子的に分けてパソコン画面に表示できるものである。
(もっと読む)
41 - 60 / 106
[ Back to top ]