
Fターム[5J083AA05]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 方式 (1,325) | パッシブ (240)
Fターム[5J083AA05]の下位に属するFターム
アコースティックエミッション
Fターム[5J083AA05]に分類される特許
201 - 220 / 240
音響センサ
効率的な態様で音響データを取得する装置、システム、方法が開示されている。いくつかの実施の形態は、分極軸及び導電層を有する圧電検知部分を有している。いくつかの実施の形態において、これらの圧電検知部分は、全体的に互いに同一平面にあり、一部電気的に接続されている。いくつかの実施の形態において、2つの圧電検知部分の分極軸は、これらの間にゼロ以外の角度を有している。ある実施の形態は、ノイズ低減素子を備える。いくつかの実施の形態において、電気信号を検知するために電極を備えている。  (もっと読む)
(もっと読む)
複数の音源によって放射される信号から音響信号を抽出するためのシステムおよび方法。
ある環境において複数の音源からそれぞれ放射される複数の音源信号から1つ以上の音響信号を抽出するためのシステムであり、このシステムは、1つ以上の音響信号を環境から受信するための、かつ、信号を信号処理装置へ送信するためのマイクロホン受信器のアレイを備え、信号処理装置は、受信器のアレイによって受信されたデータを用いて複数の音源信号を推定するように構成され、信号処理装置は、さらに、環境のインパルス応答を推定するために、推定された音源信号を用いて、受信器のアレイによって受信されたデータに演算を施すように構成され、受信器のアレイによって受信されたデータは、複数のチャンネルを備える出力を提供するために、環境のインパルス応答の推定に入力され、チャンネルの中の1つまたは複数は、それぞれ、複数の音源の中の1つからの1つ以上の音響信号に対応する。 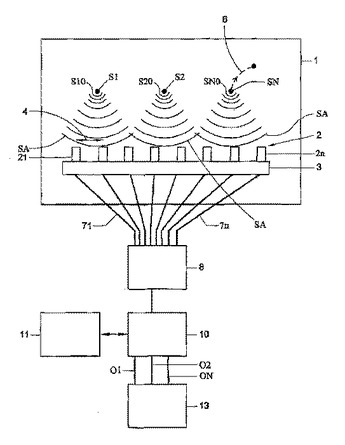 (もっと読む)
(もっと読む)
直接波反射波判定方法

【課題】ハードウェア構成を複雑化させることなく、直接波と反射波とを確実に判別する。
【解決手段】音波および電磁波を含む波動信号を受信する素子として任意に配置されるサイトに個別に設置された複数のブランチに対して、送信端から到来した波動信号の集合を示す信号ベクトルを求めるベクトル収集ステップと、信号ベクトルに基づき、サイトに到来した波動信号の相関を示す行列を求める相関演算ステップと、行列に所定の行列演算処理を行うことにより、波動信号の到来方向に関する角度スペクトルを求める行列演算ステップと、角度スペクトルの最大値を波動信号が直接波であるか否かを判定するための指標値として抽出する抽出ステップと、角度スペクトルの値に関して予め定めた少なくとも一つに閾値と指標値とを比較する比較ステップと、少なくとも一つの閾値と指標値との比較結果に基づいて、波動信号が直接波であるか否かを判定する判定ステップとを備える。
(もっと読む)
音響センサ

【課題】小型化を図りながらも所望の周波数特性を再現性良く得ることが可能であり、しかも、従来に比べて音響抵抗を大きくすることができ、カットオフ周波数を低くすることが可能な音響センサを提供する。
【解決手段】音響センサチップ1の後面側に対向配置されるベース基板2と、音響センサチップ1とベース基板2との間に配置されるフレーム4とで、音響センサチップ1の後面側に配置され音響センサチップ1との間に背室6を形成するハウジングを構成している。ハウジングとの間で音響センサチップ1を囲むようにハウジングに封着されたシールドケース5は、音響センサチップ1の振動板部12に対向する前壁5aに音孔51が形成され、音響センサチップ1は、支持部11におけるシールドケース5の前壁5aの後面との接合面に背室6と外部との間の音響抵抗を設定する通気用溝9が形成されている。
(もっと読む)
音響センサ
【課題】小型化を図りながらも所望の周波数特性を再現性良く得ることが可能な音響センサを提供する。
【解決手段】音響センサチップ1は、枠状の支持部11の内側に連続一体に形成されたダイヤフラム状の振動板部12の後面側にスペーサ部13を介して背板部14が設けられている。音響センサチップ1の後面側に対向配置されるプリント基板からなるベース基板2と音響センサチップ1との間に介在する立体回路基板4は、開口部42が形成されており、ベース基板2と立体回路基板4とで、音響センサチップ1の後面側に配置され音響センサチップ1との間に背室6を形成するハウジングを構成している。背室6と外部との間の音響抵抗を設定する通気孔9が音響センサチップ1の支持部11において厚み方向に貫設されている。
(もっと読む)
雑音を含む音響信号の質を向上させる方法および音響信号を取得して該音響信号の質を向上させるシステム
【課題】音響信号の質を向上させる超音波ドップラ技法を使用する。
【解決手段】方法及びシステムは、同時に音響源の可動部分から超音波ドップラ信号を取得しながら、音響源からマイクロフォンによって取得された音響信号の質を向上させる。そして、モデルに従って音響信号とドップラ信号とを分析することにより、質の向上した音響信号を生成する。
(もっと読む)
音響計測装置
【課題】計測結果に反映される虚像成分を抑制する。
【解決手段】各格子が正三角形の二次元三角格子を形成する各格子点にマイクロホン11を配置してマイクロホンアレイ2を構成する。また、計測対象周波数帯域に対して、計測角度範囲外に虚像が生じるように各計測特性を設定する。音圧分布解析部5は、マルチチャネルFET4が算出した各マイクの周波数帯域毎の音圧レベルより、ビームフォーマー法などにより計測角度範囲内の各方向の音圧レベル分布を周波数帯域毎に算出し、音圧分布レベル出力部は、ユーザ操作に応じて、ユーザから指定された周波数帯域について音圧レベル分布を示す音圧レベル分布画像を、GUI制御部7を介して表示装置8に表示する。
(もっと読む)
多重ビームの形成方法および装置
【課題】 従来技術のビーム形成の限界を本発明によって処置する。
【解決手段】 時分割多重を用いたネットワークを形成する多重光を形成する装置および関連する方法が開示されている。並列な数セットの光線が所定のサンプリングクロックレートで動作するネットワークハードウェアに代えて、より単純で単一のハードウェア単一部分が、サンプリングクロック速度と成形されるビームの数との積に等しいより早い速度で動作する。各素子(26a〜26m)からの受信された各サンプルは、各ビームにつき一つのビットストリームに時分割多重化されている。これらの時分割多重方式の要素のサンプルは、要素ごとに望まれる位相変移/時間遅延を適用するために重みが付けされる(30、32)。各重み付けの結果は、カスケード遅延パイプライン(34)で延期され、所定の時分割瞬間にビームを成形するためにカスケードコンバイナ(36)で結合される。この処理は、次のビームを形成すべく、配列の各要素からの時分割多重サンプルおよび重み付けの次のセットのために所定の時間に繰り返される。この処理は、サンプル時間間隔の終端まで、すべてのビームのために繰り返される。 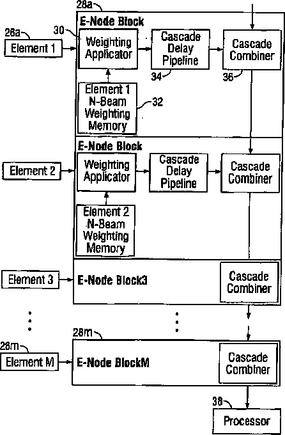 (もっと読む)
(もっと読む)
音源位置標定方法
【課題】面外変位音源に対する主成分であるA0モードのみを用いた音源位置標定方法を提供する。
【解決手段】面外変位音源によって板に生ずる板波のうちゼロ次反対称モード(A0モード)の群速度の周波数依存性を求め、該周波数成分の2点以上のセンサへの到達時間を求め、該群速度と該到達時間を用いる音源位置標定方法。また、この周波数成分の2点以上のセンサへの到達時間を、ゼロ次反対称モード(A0モード)の波形をウェーブレット変換することにより求める音源位置標定方法。
(もっと読む)
コンパクト砲撃体位置特定システムと方法
超音速発射体の砲撃体を位置特定するためのシステムと方法が記載される。砲口爆風信号は、追求も必要もされない。システムは、少なくとも2つのセンサを使用し、各センサは、3軸加速度計を有する。センサは、少なくとも1mの間隔が空けられ、約1センチメートルの直径を有する。各センサの3つの加速度計信号は、圧力勾配を表わし、衝撃波到着角度単位ベクトル、衝撃波到着時刻、およびピーク圧力を見出すために処理される。センサは、衝撃波の高周波特性において最大感度を有し、一方で周囲ノイズの低周波特性に対する感度が比較的低いため、ノイズ信号がこの感知方法で誤検出を生じることはめったにない。  (もっと読む)
(もっと読む)
任意配置のマイクロホンアレイによる非線形ビームフォーミング
【課題】 従来のフィルタの設計法(BF)の遅延和BFでは、位相のみで簡単に処理が可能なものであるが、ビームが広く、球や不等間隔アレイの時はピーク方向が保証されないもので、サイドローブが大きくなっていた。
【解決手段】 入力に応じてビームフォーミング(BF)の係数を再設計し、高分解能なビームフォーミング(BF)実現したもので、球形アレイ等を含め任意のマイクロホン配置でビームフォーミング(BF)を可能とし、更に、数9によるビームフォーミング(BF)のビーム方向を操作して得られる強度分布をもとに重みを計算し数10によりビームフォーミング(BF)を再設計を行う。
(もっと読む)
音響対象物画像化装置及び方法、対応するコンピュータプログラム製品、及び対応するコンピュータで読み取り自在な記憶媒体
本発明は、測定対象物の参照画像と関連付けられた、音響セットの助けを借りて、音響カードを利用することにより、音響対象物を画像化する装置、及びその方法に関する。また、本発明は、情報プログラム製品、及び、対応するコンピュータで読み取り自在であり、かつ、特に、写真を文書化、フィルムを文書化する際に、及び、機械、装置、乗り物等のノイズ発生箇所を音響分析する際に使用する、記憶媒体に関する。この目的のために、アコースティックカメラを使用する。このカメラは、ビデオカメラ一体型の、マイクロホン集合体、マイクロホン及び角度センサに連結したデータ記録装置、キャリブレーション装置、及びコンピュータから構成される。カメラが記録した写真を、時間依存型同期信号と関連を持たせたマイクロホンの時間関数の記録と共に、また、状況、マイクロホンパラメータのファイル、及びデータ記録装置に関するあらゆる情報と共に、データフレーム中に記録し、分離できないように一体化する形で、このビデオカメラが、各測定物を自動で文書化することが出来る。時間関数、周波数関数、音圧、座標、音質、又は、公知の時間関数との相関関係を、音響画像の各点に関して、該点上でマウスをクリックすることにより、また、マウスの右ボタンにより呼び出されたメニューにより呼び出すことが出来る。前記アコースティックカメラには、スケールカラーの最大値及び最小値を適宜プリセットするために、種々の方法(absolute、relative、manual、minus_Delta、Lin/Log、all、effective value、peak)を選択することが出来る音響彩飾等の、他のファンクションも設けられている。 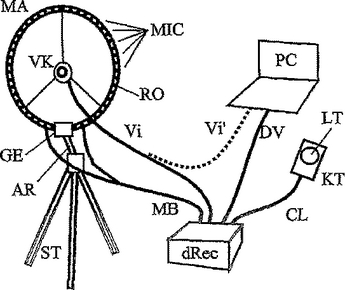 (もっと読む)
(もっと読む)
方位測定方法、方位測定方式及び水中音響計測ブイ
【課題】簡易な処理により雑音に影響されない安定した方位精度を実現可能な方位測定方法、方位測定方式及び水中音響計測ブイを提供する。
【解決手段】受波部1は目標の信号波長の略0.5倍の間隔で配置され、互いに直交するビームを形成する受波器を有し、整相処理部2は前記受波器1の出力に基づき方向の異なる複数のビームを形成する。ビーム割り当て部3は、前記複数のビームにより互いに異なる複数の直交するビームの組みを割り当て、ビーム選定部4は前記直交するビームの組みにより受信した目標信号の信号レベルの和が最大(又は前記信号レベルの差が最小)となる直交するビームを選定する。方位検出部5は前記選定した直交するビーム及びその受信信号に基づき方位を検出する。
(もっと読む)
目標体運動解析方法及び装置
【課題】 受波センサ位置の誤差によって生じる目標体の状態量の推定値の誤差を抑制できる目標体運動解析方法及び装置を提供する。
【解決手段】 本発明は、目標体から放射される信号を、目標体と相対的に運動可能な観測体に取り付けた、空間的に離れた3個以上の受波センサで受信し、目標体の位置や速度などの状態量を推定する目標体運動解析方法及び装置に関する。そして、各受波センサ間の信号到来時間差の測定結果である観測時間差時系列を得、この観測時間差時系列に対して、推定誤差を最小とする最適化手法を用いて、目標体の状態量を推定し、観測時間差時系列、及び、目標体について得られた状態量の推定結果から、推定誤差を最小とする最適化手法を用いて、少なくとも一部の受波センサの位置を推定し、推定されたセンサ位置に、該当する受波センサの位置を補正することを特徴とする。
(もっと読む)
自己較正砲撃体推定
砲撃体位置および砲撃軌跡を推定する衝撃波単独解が、衝撃到着の時間(TOA)計測の質および精度、ならびに空間の相対センサ位置に対する精度に極端に鋭敏であることが知られている。長期間に亘って配備されるシステムにおいて、センサ位置が変化することがあり、センサの性能が様々な理由により劣化するものもある。このような変化は、配備の砲撃体推定システムの性能を劣化させる。開示は、衝撃および砲口爆風計測に基づいてセンサ位置を較正するために使用され得るシステムと方法であり、既知の位置および既知の方向で発射された一連の砲撃から、ならびに衝撃単独砲撃体推定アルゴリズムを動的に適用してセンサ劣化および/または損失を補償するアプローチから処理される。  (もっと読む)
(もっと読む)
マイクロフォンアレー用信号処理装置およびマイクロフォンアレーシステム
【課題】小型のマイクロフォンアレーを用いて低い周波数帯の音声の収音を可能とするマイクロフォンアレー用信号処理装置およびマイクロフォンアレーシステムを提供する。
【解決手段】マイクロフォンアレーを構成する複数のマイクロフォンからそれぞれ出力される複数の音声信号にそれぞれ遅延を付加する遅延器(411−1〜411−M)と、それぞれ遅延を付加された前記複数の音声信号の総和をとる加算器(412)とを有する信号処理装置(4)において、前記音声信号に含まれる音声の調波構造を検出する調波構造検出部(421)と、検出された調波構造に基づいて所定の周波数成分を選択的に通過させるフィルタ部(422)とを設けた。
(もっと読む)
砲撃体位置明確化のためのシステムおよび方法
超音速飛翔体の砲撃体を位置決めするためのシステムおよび方法が記載される。このシステムは、少なくとも5つの間隔を空けた音響センサを使用する。センサ信号は、衝撃波信号および随意には砲口爆風に対して検出され、砲口爆風信号は、4未満のセンサチャンネルから来ると不完全であるか信号強度の不足によるため決定的ではないかのいずれかであり得る。遺伝的アルゴリズムが、使用されて効率的に結果を明確化することができる。  (もっと読む)
(もっと読む)
波動受信装置および波動受信判定方法
【課題】 超音波の受信タイミングをより正確に判断することのできる超音波受信装置を提供する。
【解決手段】 超音波受信部10が時間の経過とともに振幅が徐々に増大する期間を有する超音波信号を受信し、パターンマッチング部126が、超音波受信部10で受信した超音波信号の上記期間において、連続する複数の波のそれぞれの振幅の最大値としきい値設定部124に設定されたしきい値との比較パターンがパターン発生部125からの基準パターンと合致するか否かを調べ、両パターンが合致した場合に、上記超音波信号を受信したと判断する。
(もっと読む)
CPA算出方法、CPA算出装置および画像処理装置
【課題】グラム表示からCPA算出までの一連の操作を自動化できるようにし、これにより操作員の負荷の軽減を図ったCPA算出方法、CPA算出装置および画像処理装置を提供すること。
【解決手段】音響グラム表示画像データを二値化したうえで画素膨張処理を施し、でシフト領域を前処理する。次に、前処理されたシフト領域の境界線を追跡してシフト領域を分割したのち、分割されたシフト領域を細線化処理してデジタルラインとする。次に、得られたデジタルラインを線分近似したのち上限周波数F1、下限周波数F2、中心周波数F0を求め、これらのパラメータを用いてCPAレンジRdを算出する。
(もっと読む)
移動体制御装置及び方法
【課題】音源の方向を基準とする移動体の方向に関する情報と移動体の走行情報とだけを利用して移動体を高精度に制御する移動体制御装置を提供する。
【解決手段】本発明による移動体制御装置は、移動体(40)の軌道上の二カ所(P1、P2)で、音源(44)の方向(50、52)を基準として移動体(40)の方向(θ1"、 θ2")を推定し、その二カ所(P1、P2)間の走行距離(l)と、その二カ所(P1、P2)で推定された方向(θ1"、 θ2")とを利用して音源(44)と移動体(40)と間の距離(l2)を決定する。
(もっと読む)
201 - 220 / 240
[ Back to top ]