
Fターム[5J083AE10]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定対象 (1,034) | その他 (128)
Fターム[5J083AE10]に分類される特許
1 - 20 / 128
海中ネットワーク管理システム、及び海中ネットワーク管理方法、移動体装置
ポインティングシステム
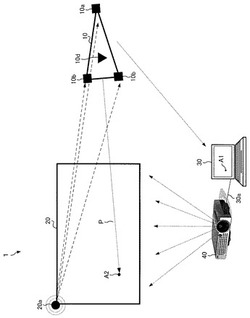
【課題】音波発信装置または音波受信装置のいずれか一方が単数であっても、ポインティングデバイスの指し示す方向を推定し、指示点の表示を行なう。
【解決手段】変調音波を発信する単一のスピーカ20aと、ポインティングデバイス10に設けられた複数のマイク10a〜10cと、ポインティングデバイス10の傾きを検出するジャイロセンサ10dと、スピーカ20aからマイク10a〜10cが受信した変調音波に相関処理を施して、マイク10a〜10cとスピーカ20aからの距離または距離差を算出し、距離または距離差に基づいて、マイク10a〜10cの空間上の位置を推定し、ポインティングデバイスの方向ベクトルを推定し、方向ベクトルと平行な直線と平面としてのスクリーン20との交点A2を推定するPC30と、を備える。
(もっと読む)
単一装置上の位置決定(POD)ならびにPODを利用する自律型超音波位置決定システムおよびその方法

【課題】対象の所在確認および追跡を行う自律型超音波屋内追跡システムを用いて対象の所在確認ならびに位置決定を行なう方法を提供する。
【解決手段】自律型超音波屋内追跡システム(AUITS)200は、RF信号および超音波信号を送信するためのRF送信器205および超音波送信器206を含む移動するタグ装置201と、タグ装置から送信されたRF信号および超音波信号を受信し対象の所在を確認する位置決定機能(POD)202とを備える。PODは複数のリーフモジュールから構成され、各リーフモジュールには位置信号の超音波受信器があり、タグ装置から送信された超音波位置信号を受信する。リーフモジュール間には既知の構造トポロジー関係があり、各超音波受信器からの位置信号検出時間ならびにPODの構造トポロジー関係を利用して、位置計算ユニット210で対象の位置が計算される。
(もっと読む)
位置算出装置、位置算出方法および位置算出プログラム
【課題】手の位置の誤検出を防止すること。
【解決手段】位置算出システムは、超音波発信機10、超音波受信機20a〜20c、位置算出装置100を有する。位置算出装置100は、超音波受信機20a〜20cから超音波の受信時間を取得し、超音波発信機10から音波が発信された時間から超音波受信機20a〜20cに超音波が到達するまでの到達時間を超音波受信機毎に特定する。位置算出装置100は、特定した複数の到達時間と、利用者1の人体の特徴から導かれる音波の到達時間とを基にして、到達時間を利用して超音波発信機10の位置を算出するか否かを判定する。位置算出装置100は、判定結果に基づいて、超音波発信機10の位置を利用者の手の位置として算出する。
(もっと読む)
地主土地境界表示音波発振装置および三角測量基準点受信位置測定装置を備えた、農地調整利用方法。
【課題】狭い個人所有の農地を一つに集めて、広大な調整農地として形成して、効率の高い農業に寄与する、農業協力技術を提供する。
【解決手段】個人持分農地A1の境界に、耐腐食性金属で形成された境界点クイa2、境界点クイb3、境界点クイc4、境界点クイd5を埋設する。順次、個人持分農地B〜個人持分農地Zと境界点を埋設して、個人持分農地を集合させた一つの広大調整農地6を形成する。広大調整農地6に基礎三角点クイX7、基礎三角点クイY8、基礎三角点クイZ9を、クイ頭部を地中より出した状態にて埋設する。このように一つの広大調整農地6として、表面上は使用されるが、個人持分農地A1を視認するため、埋設された境界点クイの正確な位置に小形金属探知器付音波発振器を差し込んで固定し、さらに基礎三角点クイの頭頂部に、着脱式音波受信位置測定器を設け、ノートパソコンを接続する。
(もっと読む)
機雷掃海システム
【課題】 機雷探知機において、目標物が含まれた信号から目標物信号成分を自動で検出するための信号処理装置と、目標物が含まれた信号を送信する水中音響通信装置を提供する。
【解決手段】 エコー信号に対してウェーブレットパケット変換を適用し周波数分解を行うことによって、目標物からのエコー信号成分が多く含まれていると予測されるものと、そうでないものとに分類する。そうでないものとされた信号成分はすべて0に置換し、また、予測された信号の主要な成分のみをさらに抽出し、その信号成分のみを用いて逆ウェーブレットパケット変換を行い、再構成を行う。これにより、予測信号の中に目標信号があればその成分だけ抽出することができる。さらに、前記手段で発見された目標物の付近の情報のみを音波を用いて転送する。目標物探知を精度良く行い、その結果のみを転送することにより、帯域に多大な制限を受ける水中音響通信においても、そのリアルタイムでの運用が現実的になる。
(もっと読む)
フェーズドアレイ型ドップラーソーダーシステム
【課題】上空の任意の位置での風向・風速値を十分な空間分解能と精度で得ることができるドップラーソーダーシステムを提供する。
【解決手段】1か所に設けられて上空に音響ビームを放射し散乱波を受信する送受波器と、送受波器の設置場所とは異なる2か所以上に設けられ散乱波を受信する受波器とを有するバイスタティック方式のドップラーソーダーシステムにおいて、送受波器及び各受波器として、いずれも複数の音響素子が配列されたフェーズドアレイ型のものを使用する。フェーズドアレイ型の送受波器及び受波器において音響ビームの放射方向を制御し、散乱波を受信する際に受信すべき散乱波の入来方法を制御することによって、散乱波でのドップラーシフト成分に基づき、上空の任意の測定位置での風向・風速値を算出する。
(もっと読む)
砲撃体検出装置、砲撃体検出方法及び砲撃体検出プログラム
【課題】個人が携行可能な小型の砲撃体検出装置を提供する。
【解決手段】衝撃波検出手段(音響センサ3)により、砲撃体1から発射された飛翔体2(銃弾)が発生する衝撃波wの音圧が3次元方向で検出され、音圧検出信号uが出力される。砲撃体方位算出手段(処理装置4)により、衝撃波検出手段(音響センサ3)から出力された音圧検出信号uに基づいて、同衝撃波検出手段(音響センサ3)の位置を基準とする砲撃体1の推定方位ndが算出されて方位情報pが生成される。
(もっと読む)
菅状体のための音響変換器
【課題】菅状体上で使用するための改良型音響変換器を提供する。
【解決手段】菅状体の回りに並置して適合するようになった弓形又は弓状部材上に配置された変換器素子で構成された音響変換器。弓形部材は、導体によって電圧を変換器素子に供給するようになっている。一実施形態は、金属弓形部材を使用する。音響源として実施される実施形態を使用して、ボアホール音響モードが励起される。いくつかの実施形態は、フェーズドアレイ音響エネルギ励起/信号受信をもたらす。変換器は、液体のない構成で密封材によって覆われ、変換器を保護するためにシールドを使用する。
(もっと読む)
音波を用いた探知方法、非接触音響探知システム、そのシステムで用いるプログラム、およびそのプログラムを記録した記録媒体
【課題】探知対象物の位置を正確に把握することができる探知方法およびその探知方法を行うことができる非接触音響探知システムの提供。
【解決手段】探知対象物を内部に含む被照射体の表面に音波を照射し、その表面の複数の測定個所において振動速度を測定し、得られた振動速度分布図から前記探知対象物の位置を特定する音波を用いた探知方法であって、音波発信源から音波を照射し、前記被照射体の表面を振動させる工程と、前記被照射体の表面のn箇所(n≧2)の測定個所を、各々、P1、P2・・・Px・・Pn(xは1〜nの整数)とし、それらの測定箇所の各々において、照射した音波の周波数がωである場合の前記被照射体の表面の振動速度を測定し、Pxにおける前記振動速度をEx(ω)とする工程と、特定の情報処理を行う工程とを備える探知方法。
(もっと読む)
水中音波撮像装置
【課題】 底質が既知でない条件下において、臨界俯角による埋没物体の検出ミスを回避し、また高感度な沈底機雷と埋没機雷の判別技術を提供する。
【解決手段】 ソーナーを備えた移動体10が移動し、ソーナーの送信投影面16が移動するにつれて水底11付近の物体を見る俯角が変化し、画像の視野内に物体が存在している間に俯角が臨界俯角12より小さくなると、その物体が水底堆積層に埋没していたら物体からのエコー受信強度が急に低下する現象を利用する。順次得る複数のソーナー画像13−1,13―2,13−3の間で、物体を示す輝度ピークの値または物体からの受信信号強度を追跡し、追跡した値が所定閾値を横切って低下した場合は、その物体は埋没機雷、追跡した値が閾値を横切らない場合は沈底機雷であると判別する。
(もっと読む)
ドップラー計測器および潮流計
【課題】耐ノイズ性能に優れ、かつドップラーシフト量を高精度で計測できるドップラー計測器を提供する。
【解決手段】重心計算区間Wt[1:n]はパワースペクトルPt[fi]のピークを含む区間であり、この区間Wt[1:n]ごとに重心周波数fwt[1:n]が算出される。仮ドップラーシフト量は、パワースペクトルPt[fi]、Pr[fi]の相互相関処理の出力が最大となるときの周波数シフト量である。重心計算区間Wt[1:n]に対応付けられた重心計算区間Wr[1:n]は仮ドップラーシフト量に基づいて決められ、この区間Wr[1:n]ごとにパワースペクトルPr[fi]の重心周波数fwr[1:n]が算出される。重心周波数fwr[1:n]、fwt[1:n]の差に対してドップラーシフトの周波数依存性の補償などが行われてドップラーシフト量fdが求められる。ドップラーシフト量fdによって重心計算区間Wr[1:n]の周波数範囲が補正され、ドップラーシフト量fdは収束するまで繰返し求められる。
(もっと読む)
海底ケーブル移動距離測定システム、装置及び方法
【課題】海底ケーブルの敷設後の位置を測定し、海底ケーブルの移動距離を算出する海底ケーブル移動距離測定システム、装置及び方法を提供すること。
【解決手段】海底ケーブル移動距離測定システム1は、海底ケーブル位置DB32と、超音波発生装置160と、超音波伝達部161と、移動装置111と、移動装置111において左側超音波受信機121Lと、右側超音波受信機121Rとを備える。そして、海底ケーブル移動距離測定システム1において、海底ケーブル移動距離測定装置10は、左側超音波受信機121Lによって受信された超音波の音圧と、右側超音波受信機121Rによって受信された超音波の音圧とが等しくなるように移動装置111を制御し、制御されて移動した移動装置111の位置情報を、GPS衛星141との通信に基づいて取得し、取得した位置情報と、海底ケーブル位置DB32に記憶された位置情報との差を算出する。
(もっと読む)
広域位置特定システム
【課題】広域のサービスエリア内を移動する携帯端末の位置を高精度で特定できる、広域位置特定システムを安価に実現する。
【解決手段】広域のサービスエリア内に、単一の基準局と複数の中継局とを1組として複数組を設け、縦方向と横方向、もしくは任意の方向に、間隔を置いて、離散的にもしくはメッシュ状に配置し、広域位置特定システムを、バースト信号としてかつ間欠的に、無線信号を発信するための基準局101a、101bと、前記無線信号を受信し、同一周波数でかつ時分割で中継しあるいは再発信するための中継局102a〜102gと、基準局101a、101bと中継局102a〜102gから発信されあるいは中継される無線信号を、広域のサービスエリア100内を移動しながら受信して、自局の位置を特定するための携帯端末103とから構成する。
(もっと読む)
位置検出装置、位置検出方法および移動体
【課題】 複数の移動体を同時に使用する場合に、他の移動体からの超音波による影響を受けることなく、それぞれの移動体の位置を正確に検出する。
【解決手段】 移動体が、トリガ信号送信手段と、前記移動体自身のトリガ信号以外のトリガ信号を受信するトリガ信号受信手段と、前記移動体が送信するトリガ信号および超音波の送信タイミングを前記移動体固有に設定された待機時間に基づいて制御する制御手段とを備え、レシーバが、トリガ信号受信手段と、相互に離れて配置された少なくとも2つの超音波受信手段と、受信した超音波から超音波到達時点を検出し、トリガ信号を受信した時点と前記超音波到達時点とから、超音波が移動体から超音波受信手段に到達するまでの超音波伝搬時間を算出する時間算出手段と、前記超音波伝搬時間と超音波受信手段相互の間隔長に基づき移動体の位置を算出する位置算出手段とを備える。
(もっと読む)
電子ペン装置
【課題】 長時間使用する場合であっても、描画性能が維持される電子ペン装置を提供する。
【解決手段】 本発明の電子ペン装置10は、電子ペン11が、電磁波送信手段と、超音波送信手段とを備える送信部を有し、受信部12が、電磁波受信手段と、少なくとも2つの超音波受信手段と、超音波が前記超音波送信手段から前記超音波受信手段に到達するまでの超音波伝搬時間を算出するデータ処理手段とを備え、データ処理装置14が、前記超音波送信手段と前記超音波受信手段との距離を計算して前記電子ペン11の位置を算出し、画像表示装置13上に電子ペン11の位置を表示し、前記超音波受信手段が、画像表示装置13の表示面側に配置され、移動手段15により、画像表示装置13に対して相対的に移動可能であり、前記移動が、画像表示装置13の表示面に対する垂直方向の移動を含むことを特徴とする。
(もっと読む)
ホースラインの形状検出システム
【課題】海中に配置されているホースラインの形状確認を行うことができ、しかも油の給送が行われている間や海象条件が悪い時でも正確な形状確認を行うことのできるホースラインの形状検出システムを提供する。
【解決手段】検出装置20から5.5kHzの音波が海中に向かって発信され、その音波に応答して各トランスポンダ10,11からそれぞれ所定の周波数の音波が発信され、検出装置20によって各トランスポンダ10,11との距離及び検出装置20に対する各トランスポンダ10,11の配置されている方向が検出される。また、検出装置20の検出結果に基づいて各トランスポンダ10,11の位置座標が前記所定時間おきに制御ユニット30によって演算されるとともに、前記所定時間おきに記憶装置31に記憶される。
(もっと読む)
位置検出装置、位置検出方法およびプログラム
【課題】被検出部周辺の環境を考慮した被検出部の音速の算出を行い、位置の検出対象とする部分付近の音速をできるだけ正確に測定し、それを用いての位置の検出精度を高める。
【解決手段】ロボットハンド101の先端部分104に超音波送信装置を配置し、さらに先端部分104を含むことが可能な多面体131〜133を設定し、それらの頂点に超音波送受信装置111〜126を配置する。先端部分104の位置検出にあたり、先端部分104に近い頂点を特定点として選択し、この特定点に向かう他の頂点からの経路の音速を算出する。この音速に基づいて、先端部分104から特定点への経路における音速を算出し、この音速の値と、先端部分104と特定点との間における超音波の伝播時間とに基づいて、先端部分104の特定点からの距離を算出する。この距離を複数の特定点について得ることで、先端部分104の位置を特定する。
(もっと読む)
位置検出装置、位置検出方法およびプログラム
【課題】被検出部周辺の環境を考慮した被検出部の音速の算出を行い、位置の検出対象とする部分付近の音速をできるだけ正確に測定し、それを用いての位置の検出精度を高める。
【解決手段】ロボットハンド101の先端部分104に超音波送信装置を配置し、さらに先端部分104を含むことが可能な多面体131〜133を設定し、それらの頂点に超音波送受信装置111〜126を配置する。先端部分104の位置検出にあたり、先端部分104に近い頂点を特定点として選択し、この特定点に向かう他の頂点からの経路の音速を算出する。この音速に基づいて、先端部分104から特定点への経路における音速を算出し、この音速の値と、先端部分104と特定点との間における超音波の伝播時間とに基づいて、先端部分104の特定点からの距離を算出する。この距離を複数の特定点について得ることで、先端部分104の位置を特定する。
(もっと読む)
超音波センサとその製造方法
【課題】ばらばらの圧電素子を1つ1つ手で並べて前面金属板にロウ付けする従来法と比較して、加工精度や整列性が向上し、圧電素子を小型化し密に配列することができる超音波センサを提供する。
【解決手段】バッキング材で形成されたブロック体3と、圧電材料で形成され所定の厚みを有し、ブロック体3の前面に接合される圧電体7と、を備える。ブロック体3に接合された状態の圧電体7にスリットが入れられることで、該圧電体7が複数の圧電素子7aに分離されているとともに、ブロック体3には、それぞれ複数の圧電素子7aへの導通路となる複数の貫通孔15が形成されており、これにより、複数の圧電素子7aは互いに独立して機能する。
(もっと読む)
1 - 20 / 128
[ Back to top ]