
Fターム[5J083AF08]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 送受波器(センサ、ソーナー)の設置 (1,005) | 移動体設置 (814) | 自動車 (359) | 前後面 (158)
Fターム[5J083AF08]の下位に属するFターム
バンパー (138)
Fターム[5J083AF08]に分類される特許
1 - 20 / 20
車両用障害物検知装置
【課題】電源からセンサに供給される電圧が変動する場合であっても、障害物を検知する距離を比較的大きくとることを可能にする。
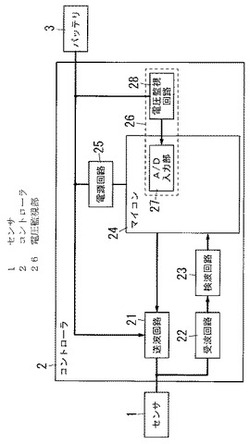
【解決手段】車両用障害物検知装置は、超音波を送受波するセンサ1と、センサ1に超音波を送波させるとともに、センサ1が受波した反射波の振幅と閾値とを比較することにより障害物の有無を判断するコントローラ2とを備える。コントローラ2は、電源電圧を検出する電圧監視部26を備え、電圧監視部26が検出した電源電圧が低いほど閾値を小さく設定する。
(もっと読む)
車両用障害物検知装置

【課題】地面による反射波の影響を受けにくい車両用障害物検知装置を提供する。
【解決手段】車両用障害物検知装置は、超音波を送受波するセンサ1と、センサ1に超音波を送波させるとともに、センサ1が受波した反射波の振幅と閾値とを比較することにより障害物の有無を判断するコントローラ2とを備える。コントローラ2は、センサ1による送波からの時間を計時するタイマ26と、タイマ26が計時する時間に応じて閾値を設定する閾値設定部27とを備える。閾値設定部27は、地面9からの反射波を考慮しない場合の閾値に、検知期間を開始する時刻における地面9からの反射波の影響を除去するための補正値を加えた閾値を設定し、障害物の有無を判断する検知期間内においてタイマ26の計時する時間が経過するにつれて段階的に閾値を小さく設定する。
(もっと読む)
走行支援装置
【課題】車両の前進時と後退時とで検知対象とすべき障害物に応じた適切な検知が可能な走行支援装置を提供する。
【解決手段】車両11の前方の障害物を検知するレーダ14と後方の障害物を検知するソナー12とを備え、車両の前進時及び後退時にレーダ14及びソナー12により検知された障害物と車両11との接触を防止するように車両11の走行を制御するPCS ECU20を備えるため、前進時及び後退時の両方で障害物と車両11との接触を防止することが可能となる。また、レーダ14は、ソナー12とは異なる種類のセンサであり、ソナー12よりも車両11から長距離に位置する障害物を検知することが可能であるため、後退時の比較的に低速な速度域と、前進時の比較的に高速な速度域とに応じて、検知対象とすべき障害物と車両11との位置関係に応じた適切な検知が可能となる。
(もっと読む)
車載用障害物検出システム
【課題】意匠性が低下することなく障害物の検知範囲の広い車載用障害物検知システムを提供する。
【解決手段】車載用障害物検出システムは、超音波を送信してその反射波を受信する複数のセンサ20(20a〜20c)と、車両に搭載されるECU10に設けられた制御部11とを備える。制御部11は、各センサ20による反射波の受信に基づいて障害物が存在するか否かを判断する検知手段12を有する。制御部11は、センサ20aを基準センサとして超音波を送信し、他のセンサ20(20b、20c)の各々について、反射波を受信した受信タイミングと、センサ20aが反射波を受信した受信タイミングとの時間差を求める。制御部11は、センサ20aの送信タイミングを基準として、他のセンサ20の送信タイミングは、先に求めた時間差だけ逆方向にずらすよう設定する。
(もっと読む)
障害物検出装置
【課題】障害物の検出に影響を与えるようなノイズが到来するのを的確に判断して、障害物の検出を正確に行うことができる障害物検出装置の提供。
【解決手段】超音波を送受信して障害物を検出する障害物検出装置であって、超音波を送信する送信手段と、上記障害物で反射した超音波を受信する受信手段と、上記受信手段における受信信号のレベルとノイズ判定閾値を比較し、上記受信信号のレベルが上記ノイズ判定閾値より大きい場合に、障害物が存在すると判断する障害物検出手段と、上記受信手段におけるノイズレベルが判明しているノイズ発生源がオン状態であるか否かを検出するオン/オフ検出手段と、上記ノイズ発生源がオン状態であるか否かに応じて、上記ノイズ判定閾値の大きさを変更する閾値設定手段とを備える。
(もっと読む)
障害物検出装置
【課題】外部からの情報の取得を不要とすることで簡易な構成としながらも、障害物の形状及び移動体と障害物との相対位置を適切に特定する。
【解決手段】障害物検出装置1は、方位が零でないと判定し、距離変化量の絶対値が第1の所定値以上であり且つ方位変化量の絶対値が第2の所定値以下であると判定すると、障害物が平面形状物体であり、車両と障害物の平面とが斜めの相対位置であると特定し、一方、距離変化量の絶対値が第1の所定値以上でない又は方位変化量の絶対値が第2の所定値以下でないと判定すると、障害物が非平面形状物体であり、その障害物の方位が零でないと特定する。
(もっと読む)
超音波測定装置及び超音波信号の評価方法
本発明は、受信装置(14)と比較装置(101)と評価装置(112)とを備えた超音波測定装置に関する。受信装置は、車両固有の超音波送信器及び/又は外部の超音波測定装置から受信した超音波信号の周期持続時間の時間経過に関する測定セットを決定する。比較装置は、決定された測定セットの少なくとも一つの基準セットからの偏差に関する比較情報を決定する。評価装置は、決定された比較情報を考慮して、超音波送信器から送出された信号形状、受信装置と外部の超音波送信器との間の相対速度、受信装置と車両固有の超音波送信器及び/又は外部の超音波測定装置との間の伝送経路内に存在する少なくとも一つの反射性の対象の相対速度、及び/又は、少なくとも一つの反射性の対象の形状の特徴的指標に関する情報を決定する。更に本発明は、超音波信号を評価するための方法に関する。 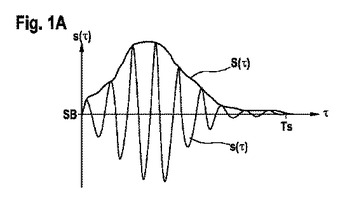 (もっと読む)
(もっと読む)
障害物検出装置
【課題】外来ノイズとセンサ送受信の混信による誤報防止を図りながら、検出エリアの変動を極力抑制する障害物検出装置を提供する
【解決手段】マイクロフォン21及び回路部23を持つセンサ5は、基準周波数モードまたは外来ノイズを避けるための前記基準周波数モードとは異なる周波数で超音波を送波するシフト周波数モードのうち、いずれかに周波数調整回路32で切替えて、超音波を送波するとともに、マイク駆動回路33での超音波の音圧またはゲイン調整回路36での受信感度を、基準周波数モードの送信時からシフト周波数モードでの送信時とで変更する。これにより、外来ノイズで誤動作し難く、かつ検知エリアの変更を抑制することが出来る。
(もっと読む)
障害物検出装置
【課題】複共振マイクロフォン21を用いて、遠距離モードと近距離モードとを切り替えることができ、この2つの異なるモードを実現するために、ハードウエア的またはソフトウエア的に共用化を行う。
【解決手段】マイクロフォン21に、高周波数駆動信号と低周波数駆動信号を提供する回路部23を備え、この回路部23を制御する制御手段3を備え、回路部23には、単一の周波数調整回路32から出力された超音波パルス信号をマイクロフォン21に昇圧して印加するトランスを備え、少なくとも一部が遠距離モード近距離モード共用のマイク駆動回路33を備え、車体上で隣り合って配置されたマイクロフォン同士は、一方が遠距離モード送信時は、他方は、近距離モード送信になるように駆動される。
(もっと読む)
障害物検出装置
【課題】簡単且つ安価な構成で至近距離まで接近することなく輪どめなどの低い障害物を判定できるようにする。
【解決手段】自動車10の後部のバンパーよりも高い位置に送受信機3を配置し、後方に向けて超音波を送信して検出対象物からの反射波を受信する。このとき、受信する反射波のピーク値を検出して記憶する。自動車10が後方に移動するに従ってピーク値が変化するのをピーク値差分として算出し、検出エリアS内から外れる路面付近障害物Pの場合にはピーク値差分が「負」となることで判定できる。
(もっと読む)
車間距離検出装置および車速制御システム
【課題】超音波を用いた車間距離検出装置において、計測の精度を向上させる。
【解決手段】自車200の前部に設置され、先行車300に対して超音波Sを送信するとともに、先行車300で反射して戻った超音波S′を受信する超音波送受信機10と、超音波Sが超音波送受信機10から送信されてから、反射波としての超音波S′が受信されるまでの経過時間ΔTを計時する計時手段30および経過時間ΔTに基づいて先行車300との間の車間距離Lを算出する距離演算部50を有する距離算出装置20と、を備え、距離算出装置20は、反射波として受信した超音波S′のうち、路面(500)から反射して受信したノイズ成分(S2′)を除去するノイズ信号除去手段40を備え、距離演算部50は、ノイズ信号除去手段40によって除去された後の超音波S′についての経過時間ΔTに基づいて、車間距離Lを算出する。
(もっと読む)
自律移動装置
【課題】 超音波の干渉による誤検出を防止しつつ、複数の超音波センサによるスキャン時間を短縮することが可能な自律移動装置を提供する。
【解決手段】 自律移動装置1は、超音波を発信するとともにその反射波を受信することにより物体を検出する16個の超音波センサ21〜36を備える。16個の超音波センサ21〜36は、上下2段に分けて、自律移動装置1の本体10の外周面に周方向に沿って等間隔に配置されている。また、自律移動装置1は、16個の超音波センサ21〜36のうち、超音波が互いに干渉しない十字状の位置に配置されている4つの超音波センサを一組として同時に駆動するとともに、駆動する組を所定時間毎に順次切替えるインターフェースボード42を備える。このインターフェースボード42は、超音波センサ21〜36の結果出力時間を計測して物体までの距離を算出し、その算出結果としての距離情報を電子制御装置60に出力する。
(もっと読む)
車両用周辺監視装置
【課題】データの送信回数を少なくすることで通信の負荷を軽減し、短時間で障害物の検知・報知処理を行うことが可能な車両用周辺監視装置を提供する。
【解決手段】車両の前後に各4個ずつ設けられ、各設置位置に応じた識別IDを記憶すると共に、超音波を送受信し、障害物からの反射波に基づいて障害物までの距離を導出する超音波センサ11〜18と、超音波センサ11〜18へ動作指示信号を送信し、更に超音波センサ11〜18から距離情報を取得して、それに応じて警報を発する制御装置2とを備え、動作指示信号は、複数の超音波センサ11〜18の識別IDからなる識別ID情報と、複数の超音波センサ11〜18に対して指示する動作内容を示す動作モード情報とを含み、超音波センサ11〜18は動作指示信号に含まれる識別ID情報と自己の識別IDとが一致する場合に動作指示信号に含まれる動作モード情報に基づいて動作する。
(もっと読む)
運転支援システム
【課題】車両が意図しない方向に進行した場合であっても、車両の周囲に位置する障害物への突入事故の発生をより低減することのできる運転支援システムを提供する。
【解決手段】誤動作防止ECU30は、車両Cの走行時には、メモリ31に記憶保持されている対応マップT1を用いて、駐車支援装置20によって検出される障害物までの距離に基づき、エンジン回転速度の限界値を設定する。一方、誤動作防止ECU30は、車両Cの発車時には、上記対応マップT1を用いて、メモリ31に記憶保持されている障害物までの距離に基づき、エンジン回転速度の限界値を設定する。そして、誤動作防止ECU30は、実際のエンジン回転速度が、設定したエンジン回転速度の限界値よりも大きいと判断する場合に、車両Cの駆動力を、その判断時の実際のエンジン回転速度に基づいて定まる駆動力よりも抑制する旨の指示を、エンジン制御ECU10に与える。
(もっと読む)
障害物検出装置
【課題】環境ノイズに対する耐性が高い障害物検出装置を提供すること。
【解決手段】本発明の障害物検出装置1は、複数種類の周波数で超音波を送受波可能な送受波手段11、13を備える超音波センサ3a、3b、3c、3dと、前記超音波センサ3a、3b、3c、3dに、前記超音波の送受波を命令するとともに、前記超音波センサ3a、3b、3c、3dから前記超音波の受波結果を取得し、前記受波結果に基づいて障害物を検出する制御手段5と、を備え、前記超音波センサ3a、3b、3c、3dは、前記送受波手段11、13が前記超音波を送波しないときに受波した超音波に基づき、送受波する前記超音波の周波数を設定する周波数設定手段9を備えることを特徴とする。
(もっと読む)
超音波センサ
【課題】 音響整合層を備え、超音波の検出感度の高い超音波センサを実現する。
【解決手段】 超音波センサ10を、バンパ20のように音響整合部材12と音響的性質が近似した部材に取り付けた場合でも、超音波センサ10が、取付部20aと音響整合部材12との間に介在され、バンパ20から音響整合部材12への振動の伝達を減衰させる振動減衰部材13を備えているので、超音波がバンパ20から音響整合部材12に伝達されてノイズの原因となることを防止することができる。これにより、超音波のノイズを低減することができるので、超音波の検出感度を向上させることができ、超音波の検出感度の高い超音波センサ10を実現することができる。
(もっと読む)
運動する対象物を検出する装置
本発明は運動する対象物、特に接近する車両を検出する少なくとも1つの超音波センサを備える装置に関する。加えて当該装置は対象物の相対速度および/または対象物に対する距離を決定する制御ユニット(5)を備え付けられている。測定値を検出する時誤った解釈を回避するために、重要な周辺条件が第2の超音波センサ(6)によって同時に検出され、補正値として信号形成の基礎に置かれる。  (もっと読む)
(もっと読む)
障害物検知装置
【課題】 確定すべき障害物の検知を早期に行うことができる障害物検知装置を提供すること。
【解決手段】 反射波を受波していないときには、各超音波センサ20FR、20FL、20RR、20RLを周期T1で送受信動作させる。一方、一の超音波センサが反射波を受波したときに、他の超音波センサが担当する検出エリア内の障害物検知の確定後、このセンサにおける反射波の受波が持続している場合には、一の超音波センサが対応付けられた動作タイミング信号S1の周期を所定の周期T1よりも短い周期T2となるように制御するとともに、他の超音波センサが対応付けられた動作タイミング信号S2の周期を所定の周期よりも長い周期T3となるように制御する。
(もっと読む)
障害物検知装置
【課題】 送信波の干渉を防ぎつつ、障害物が検知領域内に進入してからその障害物を検知するまでの時間を短縮すること。
【解決手段】 超音波センサ20RLに対して1個隔てて配置された超音波センサ20CRとの組み合わせによるグループAと、超音波センサ20RRに対して1個隔てて配置された超音波センサ20CLとの組み合わせによるグループBとに分割し、このグループ毎に送信波の送波及び反射波の受波を行う対象を順次切替えるとともに、この各グループに属する超音波センサに対する送波タイミングとして、各グループに属する全ての超音波センサが略同時に送信波を送波するように決定する。
(もっと読む)
車両用障害物検知装置
【課題】車両の運転者の運転により役立てることができる車両用障害物検知装置を提供する。
【解決手段】車両の4隅近傍に配置された超音波センサ4FL,4FR,4RL,4RRと信号送受信部11と位置検知部12とで障害物位置検出手段を構成している。接触判断手段たる接触予測部15は、位置検知部12による現時点の障害物の検出位置と進行軌跡予測部14により予測された車両1の進行軌跡とに基づいて車両1と障害物との接触可能性を判断し、上記障害物位置検出手段により相対位置が検出された障害物Bとの接触可能性が有ると判断したときと、上記障害物位置検出手段により相対位置が検出された障害物Bとの接触可能性が無いと判断したときとで表示器6の表示およびブザー5による警報音の周波数をそれぞれ変化させる。
(もっと読む)
1 - 20 / 20
[ Back to top ]