
Fターム[5J083AF10]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 送受波器(センサ、ソーナー)の設置 (1,005) | 移動体設置 (814) | 自動車 (359) | 側面 (29)
Fターム[5J083AF10]の下位に属するFターム
ミラー部 (4)
Fターム[5J083AF10]に分類される特許
1 - 20 / 25
メッシュ型空間解析技法を利用した駐車空間探知方法及びそのシステム
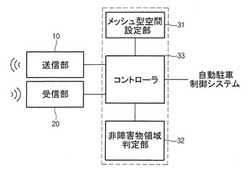
【課題】空間認知過程で発生する情報歪曲現象を解消できるメッシュ型空間解析技法を利用した駐車空間探知方法及びそのシステムを提供する。
【解決手段】本発明は、所定の制御信号に応じて超音波信号を発信する送信部と、前記送信部から発信された信号が物体に突き当たって戻る反響信号を受信する受信部と、前記送信部により超音波が走査される駐車予定空間に対して仮想の領域を設定し、当該領域を所定間隔のセル(cell)で分割したメッシュ型空間イメージをデータに格納するメッシュ型空間設定部と、前記反響信号を解析して前記メッシュ型空間設定部により設定されたメッシュ型分割領域に対して非障害物領域を確定する非障害物領域判定部と、前記非障害物領域判定部により確定された非障害物領域を除外させ、最終的な空間分析結果を算出するコントローラとを含んでなることを特徴とする。
(もっと読む)
車両用障害物検出システム

【課題】路面の凹凸を障害物として誤検知してしまうことを抑制できる車両用障害物検出システムを提供することを目的とする。
【解決手段】車両の前方側面部に設置された第一側面部センサと、前記車両の後方側面部であって、車両の左右の側面のうち前記第一側面部センサと同じ側面に設置された第二側面部センサと、障害物検出手段とを有し、第二側面部センサにより障害物を検出するための閾値を、第一側面部センサの反射波に基づいて設定することによって、自車の後側方の検出範囲に存在する障害物を精度よくユーザーに報知することが可能となる。
(もっと読む)
車両用物体認識装置
【課題】指向性の低い超音波センサを用いても、複雑な形状を有する物体の形状認識の精度を高めることができる車両用物体形状認識装置を提供する。
【解決手段】車両用物体形状認識装置1の物体形状推定部8により、物体の位置を示す距離点を超音波センサ2,3による検出距離で、照射範囲を横断した扇状の水平面の自車両の前方側臨界線近辺の対象線上の検出点および後方側臨界線近辺の対象線上の検出点のうち少なくともいずれかに設定し、自車両の移動に伴い繰り返し検出される検出距離のうち、超音波センサ2,3による自車両からの距離を検出する時刻およびその所定時間だけ前後の時刻における検出距離に基づき、各時刻の検出距離が自車両に近づくときは距離点を前方側の検出点に設定し、遠ざかるときは後方側の検出点に設定し、設定された距離点を繋ぎ合わせた形状を物体の形状と認識する。
(もっと読む)
車両用物体認識装置
【課題】超音波センサの照射範囲内の複数方向に検出点を設定し、それらの点から正確に位置が検出された点を抽出することで、超音波センサを用いた物体形状認識の精度を向上させるとともに、これに伴うコストの低減を図る。
【解決手段】超音波センサを用いて物体の形状を認識する車両用物体認識装置1において、物体形状推定部8により、円錐状に広がる所定の照射範囲を横断した扇状の水平面の少なくとも一方側および他方側臨界線近辺の対象線のうち、超音波センサ2,3による自車両からの検出距離で、一方側および他方側対象線上それぞれに検出点を設定し、自車両の移動に伴って繰り返し設定された各検出点それぞれを繋ぎ合わせて物体上の検出点軌跡を生成し、生成された検出点軌跡それぞれに基づいて検出範囲を形成し、形成した各検出範囲の重複部分を物体の形状と認識する。
(もっと読む)
運転支援装置及び障害物検出方法
【課題】一般的な超音波センサを用いて、温度変化などがあっても正確に車両と障害物間の距離を測定して報知することができる運転支援装置を提供する
【解決手段】車両に取り付けた複数の超音波センサで受信した信号を検波し、隣接する第1、第2の超音波センサの一方から他方に直接伝搬された超音波が他方で受信されるまでの第1の時間情報を算出し、第1、第2の超音波センサ間の距離情報及び第1の時間情報をもとに超音波の伝搬速度を測定する第1の測定部と、複数の超音波センサから発射され障害物で反射された超音波を受信するまでの第2の時間情報を算出し、測定した超音波の伝搬速度と第2の時間情報をもとに障害物までの距離を測定する第2の測定部と、車両と障害物間の距離が予め設定した距離以内になったときに警報を発する警告部と、を具備する。
(もっと読む)
車両用警報装置
【課題】車両と人間との接触を確実に回避することが可能な車両用警報装置を提供する。
【解決手段】車両用警報装置10は、スピーカ12と受信部13と物体検知部15と出力制御部16とを備える。スピーカ12は、車両1の外部へ超音波と可聴音波とを出力可能である。受信部13は、スピーカ12が出力した超音波の反射波を受信する。物体検知部15は、受信部13が受信した反射波に基づいて車両の周囲の所定範囲の物体を検知する。出力制御部16は、物体検知部15が物体を検知したときに、スピーカ12から可聴音波を出力させる。
(もっと読む)
駐車車両エッジ位置検出装置
【課題】水平広角度ソナーを用いても駐車車両のエッジの位置検出精度を高めることができる駐車車両エッジ位置検出装置を提供する。
【解決手段】駐車車両エッジ位置検出装置に用いられている水平広角度ソナー4は、送信器4Mと、左右一対の受信器4R、4Lとを備えている。双方の受信器4R、4Lは、共通受信領域4LRwを有している。そして、この水平広角度ソナー4では、送信器4Mの個数を1個にしている。これにより、超音波を駐車車両のエッジに向けて容易に送信することが可能になるので、エッジの位置を共通受信領域4LRwを用いて容易に検出することが可能になる。
(もっと読む)
駐車空間検出装置
【課題】水平広角度ソナーを用いても駐車空間の検出精度を高めることができる駐車空間検出装置を提供する。
【解決手段】駐車空間検出装置は、12番の反射波形4wに対応する角検出位置S1を駐車空間Sの走行側の左角の検出位置に設定し、37番の反射波形4wに対応する角検出位置S2を駐車空間Sの走行側の右角の検出位置に設定する。そして、駐車空間検出装置は、双方の角検出位置S1、S2に基づいて駐車空間Sの位置を想定する。
(もっと読む)
超音波センサの車体への取付け角度計測方法及びその計測システム
【課題】超音波センサのセンサ軸の車体への取付け基準方向に対する取付け角度を定量的にかつ簡便に計測する超音波センサの車体への取付角度計測方法を提供する。
【解決手段】 本発明の超音波センサの車体への取付角度計測方法は、
擬似路面部材2を用いて超音波センサ5の取付け基準方向SRに対する上下方向の傾きを計測するステップと、
対称性の計測対象4A、4Bを用いて超音波センサ5の取付け基準方向SRに対する左右方向の傾きを計測するステップとからなる。
(もっと読む)
自律移動装置
【課題】 超音波の干渉による誤検出を防止しつつ、複数の超音波センサによるスキャン時間を短縮することが可能な自律移動装置を提供する。
【解決手段】 自律移動装置1は、超音波を発信するとともにその反射波を受信することにより物体を検出する16個の超音波センサ21〜36を備える。16個の超音波センサ21〜36は、上下2段に分けて、自律移動装置1の本体10の外周面に周方向に沿って等間隔に配置されている。また、自律移動装置1は、16個の超音波センサ21〜36のうち、超音波が互いに干渉しない十字状の位置に配置されている4つの超音波センサを一組として同時に駆動するとともに、駆動する組を所定時間毎に順次切替えるインターフェースボード42を備える。このインターフェースボード42は、超音波センサ21〜36の結果出力時間を計測して物体までの距離を算出し、その算出結果としての距離情報を電子制御装置60に出力する。
(もっと読む)
障害物検出装置、障害物検出方法及びコンピュータプログラム
【課題】移動する移動物から障害物を検出する場合であっても、障害物の相対位置を正確に検出することを可能とした障害物検出装置、障害物検出方法及びコンピュータプログラムを提供する。
【解決手段】駐車支援処理プログラムが実行されると、測距センサ5A,5Bから超音波を車両2の側方へと送信するとともに、所定時間経過後に障害物によって反射された反射波を受信する。その後、超音波の送信位置から反射波の受信位置までの車両の移動距離、測距センサ5A,5Bの測距値等に基づいて車両が受信した反射波の反射地点Pを算出し、反射波の反射地点Pの点列データから障害物を検出するように構成する。
(もっと読む)
事故予測装置
【課題】側溝等への車両の脱輪、側溝等を原因とする車両の横転、崖下への車両の転落といった事故の可能性まで正しく予測することができる事故予測装置を提供する。
【解決手段】乗用車Cの側方から車道Rに対して斜めに第一の角度Θ1をなすように超音波を照射して反射波の検出に要した第一の所要時間T1を計測する第一センサ1と、第一の角度Θ1より小さい第二の角度Θ2で超音波を照射して反射波の検出に要した第二の所要時間T2を計測する第二センサ2と、第二の角度Θ2より小さい第三の角度Θ3で超音波を照射して反射波の検出に要した第三の所要時間T3を計測する第三センサ3と、反射波が検出された場合の各所要時間T1〜T3が、所定の各基準時間より長いか否かに基づいて、事故の発生の可能性を予測する予測部4と、予測部4によって予測された事故の発生の可能性を報知する報知部5と、を備える。
(もっと読む)
車両用超音波物体感知システム
【課題】基準データのチューニングが可能な車両用超音波物体感知システムを提供する。
【解決手段】本発明の車両用超音波物体感知システムは、超音波を発生させて反射波信号を受信するセンサー部と、車両通信に連結され、外部マスターからの命令に基づいて駐車補助モードまたはチューニングモードを実行し、チューニングモード実行の際に、センサー部から受信した反射波信号データをRAMに格納していて、車両通信を通じて外部マスターに送信するように構成されたPAS部と、を含むことを特徴とする。
(もっと読む)
プラットホーム検知用の超音波センサ
【課題】クロストークを大幅に低減することで、広範囲検知と近距離検知を両立できる超音波センサを提供する。
【解決手段】超音波素子10と、この超音波素子10に設けられ、該超音波素子10の軸心Cに対して平行に延びるホーン平行部9aと、該超音波素子10の軸心Cに対して垂直に延びるホーン垂直部9bと、を交互に連ねて階段状に形成される、ホーン9と、を含む超音波ユニット6を有する。
(もっと読む)
駐車支援装置
【課題】精度の高い駐車区画検知機能を有するとともに、ドライバにとって利便性の高い駐車支援装置を実現することを目的とする。
【解決手段】第一及び第二の距離測定センサをそれぞれ車両に搭載し、前記第一の距離測定センサの出力情報と自車両位置演算手段の演算結果とに基づいて隣接車両の存在領域を特定し、隣接車両が存在しない駐車可能区画の形状と、自車両に対する相対的な位置ならびに傾きを演算する駐車区画検知手段を備えると共に、前記駐車区画検知手段により演算された駐車可能区画の自車両に対する相対的な位置ならびに傾きを前記第二の距離測定センサの出力情報に基づいて補正する駐車区画補正手段を備えた駐車支援装置である。
(もっと読む)
超音波送受波器
【課題】従来の実施の形態に関わる超音波送受波器においてはバックセンサやコーナーセンサ等に用いる際1次振動モードの周波数を変更したり外径を変更する等した複数種のセンサを用いなければならなかった。
【解決手段】超音波送受波器において、有底筒状ケースの圧電素子接着面に1本の連続した溝を設け、またはその周りに複数の溝を2重以上になるように設け、あるいは薄肉部を設けてそれらの全体ないしは一部を覆うように圧電素子を貼り合わせる。さらには内部をくりぬいた圧電素子を有底筒状ケースに貼り合わせ、そのくりぬき部にもう一枚の圧電素子を貼り合わせる。これらにより1次振動モードに相当する共振モードを複数発生させることが可能になる。
(もっと読む)
超音波センサ
【課題】 音響整合層を備え、超音波の検出感度の高い超音波センサを実現する。
【解決手段】 超音波センサ10を、バンパ20のように音響整合部材12と音響的性質が近似した部材に取り付けた場合でも、超音波センサ10が、取付部20aと音響整合部材12との間に介在され、バンパ20から音響整合部材12への振動の伝達を減衰させる振動減衰部材13を備えているので、超音波がバンパ20から音響整合部材12に伝達されてノイズの原因となることを防止することができる。これにより、超音波のノイズを低減することができるので、超音波の検出感度を向上させることができ、超音波の検出感度の高い超音波センサ10を実現することができる。
(もっと読む)
障害物検出装置
【課題】近距離にある障害物であっても遠距離にある障害物であっても適切に検出可能な障害物検出装置を提供すること。
【解決手段】障害物検出装置が備える超音波センサは、ECUからの指令に応じて送波周波数および送波出力を変更可能で、これにより、指向性が高くて検出距離が長距離となる遠距離モードと指向性が低くて検出距離が短距離となる近距離モードとを切り替えて、障害物の検出エリアを変更することができる。検出エリアを変更する際には、例えば、車速Vが所定の閾値V2以下の場合には(S420:NO)、近距離モードとされ(S425)、これにより、車両近傍の不感帯を減少させることができる。一方、車速Vが所定の閾値V2より大の場合には(S420:YES)、遠距離モードとされ、これにより、より遠方の障害物を精度良く検出できるようになる。
(もっと読む)
物体検出装置、および車車間通信システム
【課題】車両の周囲に存在する物体を検出する物体検出装置において、路側物と二輪車等の車両とを精度よく識別できるようにする。
【解決手段】支援制御ECUは、車両検出処理において、複数のサイドカメラによる撮像画像に基づく画像処理と、複数のソナーによる検出タイミングの差分とによって検出した物体の各移動速度を比較することにより、物体が車両であるか否かを判定する。即ち、別々に検出した物体の移動速度を比較することによって、物体の移動速度を高精度に求め、この物体の移動速度に基づいて物体が車両であるか路側物であるかを識別できるようにしている。従って、路側物の形状が車両の形状と似ている場合であっても、この物体が路側物であるか車両であるかを誤判定することなく精度よく識別することができる。
(もっと読む)
車両周辺監視装置
【課題】通常の障害物に加えて段差などの障害物も検知して表示できて、衝突や脱輪などの事故防止に寄与できるようにする。
【解決手段】車両周辺監視装置1は、複数の超音波ソナー3a〜3j、4a〜4fと、制御回路2と、表示装置5とを備えて構成される。制御回路2は、超音波ソナー3a〜3j、4a〜4fにより検知された障害物検知信号に基づいて車両走行面より上方に突出する凸状障害物及び車両走行面より下方へ凹む凹状障害物の有無を検出すると共に、検出された障害物の位置を検出し、該検出された各障害物の位置を表示装置5に表示する。
(もっと読む)
1 - 20 / 25
[ Back to top ]