
Fターム[5J083AF16]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 送受波器(センサ、ソーナー)の設置 (1,005) | 移動体設置 (814) | 船舶 (199) | 船底 (138)
Fターム[5J083AF16]に分類される特許
1 - 20 / 138
魚探映像表示装置、魚群探知装置、目的地指定プログラム、及び目的地指定方法
【課題】魚探映像を表示するとともに、過去に取得した魚探映像が示す位置を目的地とする自動操舵を簡単な操作で行わせることができる魚探映像表示装置を提供する。
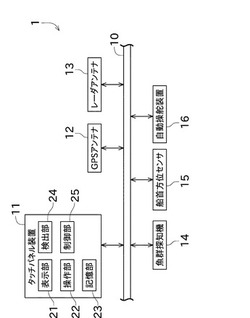
【解決手段】タッチパネル装置(魚探映像表示装置)11は、記憶部23と、表示部21と、制御部25と、を備える。記憶部23は、魚群探知機14が水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。表示部21は、探知データで構成される魚探映像を表示する。制御部25は、表示部が表示する映像に対する指定操作が行われた場合に、指定された部分を構成する探知データに対応する位置を求め、当該位置を目的地とする自動操舵を自動操舵装置16に行わせる。
(もっと読む)
魚群予測位置表示システム、水中探知装置、記憶装置、魚群予測装置、魚群予測位置表示プログラム、及び魚群予測位置表示方法

【課題】魚群の位置について精度の高い予測を行って表示する魚群予測位置表示システムを提供する。
【解決手段】魚群予測位置表示システムは、取得部81と、出力制御部82と、記憶部71と、魚群予測部74と、表示部と、を備える。取得部81は、魚群状況情報を取得する。出力制御部82は、取得部81が取得した魚群状況情報を記憶部71へ出力する。記憶部71は、出力制御部82が過去に出力した複数の魚群状況情報で構成されるデータベースを有する。魚群予測部74は、前記データベースに基づいて魚群予測位置を出力する。表示部は、魚群予測部が出力した魚群予測位置に基づく映像を表示する。出力制御部82が出力する魚群状況情報には、魚群を検出したときの情報と、魚群が検出できなかったときの情報と、が含まれる。魚群予測部84は、これらの情報の対比に基づいて魚群予測位置を出力する。
(もっと読む)
水中探知装置、水中探知方法、および水中探知プログラム
【課題】正確に魚種を判別可能な新たな魚種判別機能を備える水中探知装置を提供する。
【解決手段】水中探知装置1の演算処理部14は、取得したエコー信号から単体魚を検出する(S101)。演算処理部14は、検出した単体魚毎に入射角を検出する(S102)。演算処理部14は、入射角を検出した単体魚の反射強度TSを算出する(S103)。演算処理部14は、算出した反射強度TSの入射角特性と、魚種毎に設定されたテンプレート特性曲線とを比較する。演算処理部14は、算出した反射強度TSの入射角特性が最も類似するテンプレート特性曲線に対応する魚種を選択する(S104)。
(もっと読む)
周波数検出方法及び装置
【課題】所望の周波数分解能力を維持しながらフーリエ変換におけるサンプリング周波数を低くしてサンプル数を少なくし、複素乗算回数を減らす。
【解決手段】周波数fcを含む所定の周波数帯域幅Δfp内で受信信号の周波数解析を行う装置は、受信信号の周波数変換を行う変調器3と、変調器3の出力に接続したアナログフィルタ4と、アナログフィルタ4の出力をオーバーサンプリングでデジタル信号に変換するA/D変換器6と、A/D変換器6の出力から周波数帯域幅Δfpに相当する成分を抽出するデジタルBPF(バンドパスフィルタ)7と、周波数ゼロからΔfpに相当する帯域幅内に配置されるように、デジタルBPF7から出力される信号をダウンサンプリングするダウンサンプリング部8と、ダウンサンプリング部8の出力に対して高速フーリエ変換を行うFFT処理部9とを備える。
(もっと読む)
ターゲット長計測装置、ターゲット長計測方法、およびターゲット長計測プログラム
【課題】目的物標の種類を判別することにより、この目的物標の体長の算出精度を向上させたターゲット長計測装置を提供する。
【解決手段】送信部20が、送受波器10に送信させた超音波信号のエコー信号を受信部30で受信する。魚種判別情報算出部40が、この受信したエコー信号に基づき、目的物標である魚群、または魚体を探知するとともに、その魚群、または魚体の種類を判別する。また、TS計測部51が、受信したエコー信号に基づき、この目的物標のターゲットストレングスを計測する。また、魚体長算出部50が、魚種判別情報算出部40が判別した魚種について、TS標準化値記憶部53に記憶しているターゲットストレングスの標準化値、およびTS計測部51が計測したターゲットストレングスを用いて、魚体長を算出する。
(もっと読む)
水中探知装置、水中探知方法及びプログラム
【課題】所定レベル以上のエコー信号を取得できない場合でも、信頼性のある水深を取得することができる水中探知装置、水中探知方法及びプログラムを提供する。
【解決手段】送信された信号が水中で反射してなるエコー信号に基づいて、水深を検出する水中探知装置であって、自装置の位置を取得する。位置の水深を示す水深データを取得する。取得した位置及び取得した水深データに基づいて、検出すべき水深を推定する。エコー信号に基づく画像と、推定した水深とを表示する。
(もっと読む)
超音波送受信装置、定量検出方法、および魚量検出方法
【課題】短時間で正確に魚量を計測できる超音波送受信装置を実現する。
【解決手段】魚群探知機に相当する第1超音波送受信部21は、船舶の鉛直下方向へ第1超音波信号を送信し、魚群に反射して得られるエコー信号を出力する。ソナー装置に相当する第2超音波送受信部22は、船舶の下方向の所定範囲に第2超音波信号を送信し、魚群に反射して得られるエコー信号をビーム形成したビームエコー信号を出力する。演算部30は、エコー信号から得られる魚群のエコー強度に関するデータと、エコービーム信号から得られる魚群の大きさに関するデータから、魚量を算出する。
(もっと読む)
探知装置およびプログラム
【課題】必要以上に干渉除去を行わず、従来よりも高精度に干渉の検出を行うことができる探知装置を提供する。
【解決手段】送信信号に対するエコーの強度に応じた受信信号を出力する送受信部と、前記受信信号から、干渉信号を検出する干渉検出部と、を備え、前記干渉検出部は、干渉信号であると判断した受信信号の数に応じて、第1の干渉検出処理から、前記第1の干渉検出処理よりも干渉の検出感度が高い第2の干渉検出処理に切り替える、または第2の干渉検出処理から第1の干渉検出処理に切り替える切替動作を実行する。
(もっと読む)
水中探知装置、魚群探知機、水中探知方法及びプログラム
【課題】一の装置で、魚又は水深検出及び底質判別の両方を精度よく行うことができる水中探知装置、魚群探知機、水中探知方法及びプログラムを提供する。
【解決手段】魚群探知機1は、送信部14で魚群探知用の送信信号と海底の底質判別用の送信信号とを生成する。生成した送信信号を送受波器16へ出力し、魚用超音波と海底用超音波を送波し、その反射波を受波する。このとき、魚群探知機1は、受波した反射波に係る海底エコーのパルス幅が、魚エコーのパルス幅よりも長くなるようにして、各エコーから、信号処理部19において魚群探知及び海底の底質判別を行う。
(もっと読む)
信号処理装置、探査装置、信号処理プログラム、及び信号処理方法
【課題】サイドローブやマルチパスの影響を受けずに海底を検出することができる信号処理装置を提供する。
【解決手段】信号処理装置12は、移相部20と、素子位相分散値算出部21と、海底検出部25と、を備える。移相部20は、複数の受信素子15の出力信号を整相して整相済データ32を取得する。素子位相分散値算出部21は、各受信素子15間での整相済データ32の位相の分散値Dkを求める。海底検出部25は、前記分散値Dkに基づいて目標を検出する。
(もっと読む)
水中物体捜索計画立案支援方法およびその装置
【課題】水中物体がとり得るあらゆる回避行動パターンを想定した上で、水中物体を効率良く捜索する捜索計画を立案すること。
【解決手段】本発明は、海洋内に潜在する水中物体を捜索する捜索計画の立案を支援する、水中物体捜索計画立案支援装置が行う水中物体捜索計画立案支援方法に適用される。本方法は、前記水中物体の複数の回避行動パターンと、前記複数の回避行動パターンの各々の発生確率と、を記憶部に設定する設定ステップと、捜索領域内に前記水中物体が一様に分布する状態を初期状態として、前記発生確率に応じた回避行動パターンに従って前記水中物体を回避行動させるシミュレーションを開始するシミュレーションステップと、シミュレーション後における前記捜索領域内の前記水中物体の存在分布を表示部に表示する表示ステップと、を有する。
(もっと読む)
船舶用ソナードームおよび船舶用ソナー装置
【課題】効率よく製造でき、また、剥がれる可能性もなく、送受波器の性能を確保する上で有利なソナードームを提供すること。
【解決手段】ソナードーム16は、音響透過領域22と遮音領域24とを有している。ソナードーム16は、内側部材30と、外側部材32と、それらで挟まれたコア材34とを含んで一体成形されている。内側部材30は、音響の透過を可能とした材料で形成されコア材34を支持するフレームとして機能する。外側部材32は、音響の透過を可能とした材料で形成されコア材34の剥がれを阻止するカバーとして機能する。音響透過領域22を構成するソナードーム16の箇所は、コア材34が、音響の透過を可能とした粘弾性体34Aで構成されている。遮音領域24を構成するソナードーム16の箇所は、コア材34が音響を遮音する(振動雑音の低減を含む)遮音材34Bで構成されている。
(もっと読む)
水中位置探知システム、水中位置探知システムに用いられる超音波発信手段および船側受信手段、ならびに水中位置探知方法
【課題】母船から見たダイバーの3次元的な位置を正確に把握することを可能とする水中位置探知手段を提供する。
【解決手段】水中位置探知システム11は、ダイバーA側に取り付けられる超音波発信装置12から発信される超音波20を、船S側に設けられる船側受信装置13によって受信し、水中におけるダイバーAの位置を探知するためのシステムである。ここで、船側受信装置13は、複数の超音波マイクロフォン18を有する超音波受信装置21と、発信同期信号22Sと超音波信号との間の時間差τを出力する比較装置23と、比較装置23によって出力された時間差τに基づいて、ダイバーAと超音波マイクロフォン18との間の距離Lを計算する距離演算装置24と、距離Lに基づいてダイバーAの3次元座標を計算する座標演算装置25と、ダイバーAの座標を画像に表示する画像表示装置26とを有する。
(もっと読む)
物標探知装置及び物標探知方法
【課題】単体魚等の物標を高精度で検出する。
【解決手段】単体魚の検出を行う水中探知装置10は、受信信号に対し、所定期間毎にその期間内の最大値を抽出するマックスピークホールド部1611と、受信信号に対し、所定期間毎にその期間内の最小値を抽出するミニピークホールド部1612と、互いに異なるピークホールド位置で抽出された最小値と最大値との間の勾配を用いて単体魚を示す信号の立ち上がり及びその立ち下がりを判定する単体魚一次検出処理部162とを備えている。
(もっと読む)
水中探知装置及び水中探知システム
【課題】他船の航跡からの反射信号に関わらず、魚群信号を識別容易に表示する。
【解決手段】スキャニングソナー10は、レーダ装置10から他船の位置の情報を継続して取得する。表示画像処理部134は、この他船の位置情報に所定の加工、すなわち輝点を表す画像信号に変換する処理を施す。変換された輝点画像は、航跡情報に沿って線状となり、探知画像に重畳されて表示部に導かれる。
(もっと読む)
底質判別装置、超音波探知機、パラメータ設定方法及びパラメータ設定プログラム
【課題】ニューラルネットワークを用いて、正解率の高い底質判別結果を得ることができる底質判別装置、超音波探知機、パラメータ設定方法及びパラメータ設定プログラムを提供する。
【解決手段】水中に出力された超音波に係るエコー信号を入力し、ニューラルネットワークを用いて底質判別処理部172で海底の底質判別を行う超音波探知機において、結合荷重記憶部174に、ニューラルネットワークで用いる結合荷重を、位置情報に対応付けて複数記憶する。結合荷重設定部173は、位置情報を受け付け、受け付けた位置情報に対応する結合荷重を、結合荷重記憶部174から取得し、取得した結合荷重を、底質判別処理部172のニューラルネットワークに設定する。
(もっと読む)
探知装置、水中探知装置、探知方法及びプログラム
【課題】余分な機器を設けることなく、反射波に含まれる雑音を低減させて、精度のよい探知結果を得る。
【解決手段】水中探知装置1において、受信信号Rf(t)から、エコー及びノイズに係る受信信号Rf(t1)と、ノイズのみに係る受信信号Rf(t2)とに分離し、それぞれの受信信号Rf(t1)及びRf(t2)をフーリエ変換する。受信信号Rf(t1)及びRf(t2)のパワースペクトルを算出した後、受信信号Rf(t1)からRf(t2)のパワースペクトルを減算し、減算結果に対してフーリエ逆変換を行う。水中探知装置1は、その結果に基づいて、水中の探知を行う。
(もっと読む)
水中探知装置
【課題】ノイズのレベルに影響されることなく、対象物のエコーを確実に視認できる探知画像を生成する。
【解決手段】TVG処理部41は、受信信号EB(t)をTVG処理し、受信信号EBc(t)を生成する。平均レベル算出部42は、複数の受信信号EBc(t)における同一距離位置の方位方向に沿った各信号レベルの平均レベルAV(t)を算出する。閾値設定部43は、距離に応じた閾値Th(t)を設定する。ゲイン設定部44は、平均レベルAv(t)が閾値Th(t)以上であればゲインG(t)=Th(t)/Av(t)を設定し、平均レベルAv(t)が閾値Th(t)未満であればゲインG(t)=Coを設定する。乗算器45は、受信信号EBc(t)にゲインG(t)を乗算し、探知画像用信号DD(t)を生成する。探知画像形成部46は、探知画像用信号DD(t)の信号レベルに応じた階調表示の探知画像データを生成する。
(もっと読む)
探知装置、スキャニングソナー、探知装置の制御方法及び探知装置用プログラム
【課題】装置設定のためのパラメータの管理を容易に行うことができる探知装置を提供する。
【解決手段】制御部70の抽出部71は、メモリ80の格納領域82から付与されるコード化情報に基づいて、メモリ80の格納領域81に格納されている装置設定用の全てのパラメータの中からエコー画像関連パラメータの値を抽出する。エンコード部73は、抽出部71で抽出されるエコー画像関連パラメータの値をエコー画像関連コードに変換する。イメージ信号生成部74がエンコード部73で変換して得られるエコー画像関連コードを表示部20に出力する。
(もっと読む)
水中探知装置及び水中探知方法
【課題】より確実、且つ、より精度良く魚の追尾を行うことができる水中探知装置および方法を実現する。
【解決手段】送受波器10で得られた魚Fiのエコー信号に基づく受信信号をマッチドフィルタ処理することで、パルス圧縮した検出信号を得る。対象の魚Fiの観測位置および加速度を算出する。算出した加速度に基づいて、誤差共分散を設定する。設定した誤差共分散と、算出した観測位置とを、拡張カルマンフィルタに代入し、魚Fiの推定位置を算出する。
(もっと読む)
1 - 20 / 138
[ Back to top ]