
Fターム[5J084BA04]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 光源の種類に関するもの (1,162) | レーザ光源 (1,039) | 半導体レーザ (523)
Fターム[5J084BA04]に分類される特許
41 - 60 / 523
固体撮像装置
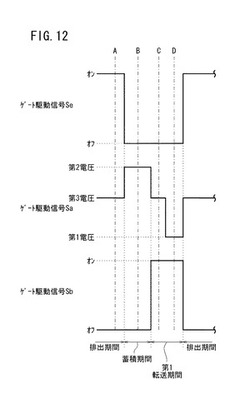
【課題】光電変換素子で発生した光電子の転送の際に、光電変換素子に残留する光電子数を軽減させるとともに、光電子の転送の高速化を図る固体撮像装置を提供する。
【解決手段】光を検知して光電子を発生する光電変換素子を有する単位画素と、前記単位画素を駆動する画素駆動部と、を備え、前記光電変換素子は、フォトゲート構造により形成され、前記画素駆動部は、3値の電圧のうち、いずれかの電圧を前記光電変換素子のフォトゲートに印加させることで、前記光電子の発生、転送を行い、前記3値の電圧は、少なくとも、第1電圧と、前記第1電圧より高い第2電圧と、前記第1電圧より大きく且つ前記第2電圧より小さい第3電圧とを有する。
(もっと読む)
測距システム

【課題】光源の強度や環境光に依存しない信頼性の高い距離情報を取得することができる測距システムを提供する。
【解決手段】照射装置と固体撮像装置と演算部とを備える測距システムであって、前記固体撮像装置は、第1照射タイミングで照射された照射光の反射光を第1受光期間で受光し、第2照射タイミングで照射された前記照射光の前記反射光を第2受光期間でそれぞれ受光するとともに、前記第1照射タイミング又は前記第2照射タイミングに対して予め決められた第3受光期間で受光し、前記演算部は、前記第1受光期間〜前記第3受光期間で得られた光電子数とを用いて前記測距対象までの距離を算出し、前記第1受光期間及び前記第2受光期間は前記固体撮像装置に到達する前記反射光の強度が減少してから該反射光の前記固体撮像装置への到達が終了するまでの時間を含み、前記第3受光期間は前記固体撮像装置に到達する前記反射光の強度が一定となる時間である。
(もっと読む)
レーザレーダ装置
【課題】 スキャン周期を必要に応じて制御可能なレーザレーダ装置を提供する。
【解決手段】 近距離ターゲットが有るか否かを判断し(S150)、近距離ターゲットがある場合(S150:YES)、測距時間要因を変更設定する(S160)。具体的には、通常時よりも、レーザ光の出射間隔である「発光間隔」を短くし、また、同一探査領域からの反射光の「受光回数」を減らすようにする。そして、設定された測距時間要因で測距を行い(S100)、ターゲットの位置を取得し(S110)、ターゲットの速度を算出して(S120)、データを更新する(S130)。つまり、非可動の配光器を用いて探査領域へ並行してレーザ光を照射するようにし、レーザ光の出射間隔及び反射光の受光回数を変更することで、探査に要する時間を変更する。
(もっと読む)
測距システム
【課題】光源の強度や環境光に依存しない信頼性の高い距離情報を取得することができる測距システムを提供する。
【解決手段】照射装置と固体撮像装置と演算部とを備える測距システムであって、前記固体撮像装置は、第1照射タイミングで照射された照射光の反射光を第1受光期間及び第2受光期間で受光するとともに、第2照射タイミングで照射された前記照射光の前記反射光を、第3受光期間及び第4受光期間でそれぞれ受光し、前記演算部は、前記第1受光期間〜前記第4受光期間で得られた光電子数を用いて、測距対象までの距離を算出し、前記第1受光期間及び前記第3受光期間は、前記反射光が前記固体撮像装置に到達してから該反射光の強度が最大になるまでの時間を含み、前記第2受光期間及び前記第4受光期間は、前記固体撮像装置に到達する前記反射光の強度が減少してから該反射光の前記固体撮像装置への到達が終了するまでの時間を含む。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲において三次元的に物体を認識し得るレーザレーダ装置において、レーザ光の走査をより高速に行い得る構成を、小型化、軽量化を図りつつ実現する。
【解決手段】レーザレーダ装置1に設けられた偏向部41には、水平面に対する勾配状態がそれぞれ異なるように構成された複数の反射面101〜104が中心軸42aを中心として多重に且つ多段に配されている。更に、偏向面41aに対してライン走査がなされるようにミラー31が制御され、この偏向面41a上におけるレーザ光L1のライン走査位置は、偏向部41の回転に応じて複数の反射面101〜104上を相対的に移動する。そして、この相対移動の過程において、ライン走査されるレーザ光L1が複数の反射面101〜104にそれぞれ入射し、各反射面からは水平面に対する角度がそれぞれ異なるようにレーザ光L1が反射するようになっている。
(もっと読む)
レーザレーダ装置
【課題】三次元走査可能なレーザレーダ装置において、水平方向に近い方向にレーザ光を走査する場合に水平方向から外れた方向からの外乱光の影響を効果的に抑制し得る構成を提供する。
【解決手段】レーザレーダ装置1には、フォトダイオード20(受光手段)で受光可能となる視野範囲を変更可能な視野範囲変更手段が設けられている。この視野範囲変更手段は、集光レンズ62からフォトダイオード20までの経路長さを調整すること視野範囲を変更しており、偏向部41からのレーザ光L1の方向が第1方向(水平方向とのなす角度が相対的に大きくなる方向)に設定されている場合には、視野範囲を相対的に広い第1範囲に設定し、レーザ光L1の方向が第2方向(水平方向とのなす角度が相対的に小さくなる方向)に設定されている場合には、視野範囲を第1範囲よりも狭い第2範囲に設定している。
(もっと読む)
レーザレーダ装置
【課題】レーザ光の照射経路上のカバーで生じる内部反射光(外乱光)が受光センサに入り込むことをより確実に抑制することができ、外乱光に起因する誤検出を効果的に防止し得る構成を提供する。
【解決手段】レーザレーダ装置1では、受光面20aの前方側且つ下側寄りの位置を部分的に覆う構成で遮蔽部材70が配置されている。この遮蔽部材70には、受光面覆い部77と、上下に並ぶ複数の凸状部71とを備えており、いずれの凸状部71も、中心軸42aを通り且つ受光面20aの中心位置を通る切断面において外形が三角形状となっており、隣接する凸状部間には窪み79が形成されている。そして、窪み79の上側に配置される凸状部下方面は、レーザ光L1が凹面鏡41から前方側に照射されるときに、当該レーザ光L1の一部が透過板80で反射して生じる鏡面反射成分又はガウス拡散成分を窪み79の内壁に向けて反射するようになっている。
(もっと読む)
距離測定装置
【課題】偏向素子へレーザ光を導くための光学部品を測定範囲内に配置した場合でも死角を形成することなく、広角な範囲を測定可能な距離測定装置を提供する。
【解決手段】レーザ光を用いて測定対象との距離を測定する距離測定装置であって、
レーザ光を出力するレーザ出力部1と、第1の方向に偏光したレーザ光を第1の方向と異なる第2の方向に偏光するとともに測定対象へ向けて偏向する偏向部3と、測定対象の測定範囲内に配置され、第1の方向に偏光したレーザ光を反射して偏向部3へ導き、且つ第2の方向に偏光したレーザ光を透過可能な第1の反射型偏光板2と、第1の反射型偏光板2を保持し、且つ第2の方向に偏光したレーザ光を透過する透明保持体6とを備える。
(もっと読む)
車両の物体距離認識システム及び作動方法{VEHICULAROBJECTRANGINGSYSTEMANDMETHODOFOPERATION}
【課題】本発明は、長距離センサ及び短距離センサを持つ車両の物体距離認識システムにおいて、センサ自体によって提供された情報に基づき、少なくとも1つのセンサのサンプリングレートを減少させ、平均故障間隔の向上を図るためのものである。
【解決手段】長距離視野角を有する長距離センサ、及び前記長距離視野角をオーバーラッピングして超過する短距離視野角を有し、角度分解能を有する短距離センサを持つ車両の物体距離認識システムにおいて、サブシステムの作動に求められる放射されたレーザパルスの数を減少させ、前記サブシステムのレーザエミッタの寿命を延ばすために、2つの相補的な物体検知及び距離認識サブシステムのサンプリング回数変調方法を開示する。
(もっと読む)
距離測定装置
【課題】光検出器のダイナミックレンジを簡易な構成で拡大することができ、測定対象物までの距離に拘らず、測定対象物までの距離を精度よく測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定対象物に対し測定光を投光する光投光部と、測定対象物で反射された反射光を集光する集光光学系と、一定の受光感度を有する複数の受光素子が被照射面内に配置された光検出器と、集光光学系と光検出器との間に配置された光量分布変換素子と、複数の受光素子から検出信号を取得し、取得された複数の検出信号に基づいて測定対象物までの距離を演算する制御部と、を備える。光量分布変換素子は、被照射面において、複数の受光素子の各々が配置される位置に応じて、予め定めた光量分布が得られるように、集光光学系で集光された反射光の光量分布を変換する。
(もっと読む)
光ファイバ増幅器、光検出装置、及び距離測定装置
【課題】短時間且つ所望のタイミングで増幅率を変更することができる光ファイバ増幅器と、この光ファイバ増幅器を用いた光検出装置及び距離測定装置と、を提供する。
【解決手段】光ファイバ光増幅器は、希土類が添加された光ファイバで構成され、当該光ファイバの一端から入射された信号光を増幅し、増幅された信号光を当該光ファイバの他端から射出する第1の光ファイバと、希土類が添加された光ファイバで構成され且つ第1の光ファイバの他端に結合された第2の光ファイバと、第2の光ファイバに第1の励起光を注入する励起光源と、誘導放出を生起させるスイッチ光を第2の光ファイバに入射させるスイッチ光源とを含み、スイッチ光の入射により第2の光ファイバから誘導放出された第2の励起光を第1の光ファイバに注入する増幅励起部と、を備える。
(もっと読む)
距離測定装置
【課題】測定対象物までの距離に拘らず、光検出器のダイナミックレンジの範囲で、測定対象物までの距離を精度よく測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定対象物に対し測定光を投光する光投光部と、等速で回転移動して対象物で反射された反射光を複数方向に反射可能に構成された可動鏡と、可動鏡で反射された反射光を集光する集光素子と、集光素子の焦点面に配置された予め定めた面積の受光領域を備え、受光領域で受光された光を検出する光検出部と、測定範囲の上限距離に在る対象物からの反射光を受光した場合には受光領域への結合効率が最大となる位置に可動鏡を移動させ、測定範囲の下限距離に在る対象物からの反射光を受光した場合には受光領域への結合効率が小さくなる位置に可動鏡を移動させる駆動制御部と、計測時間から測定対象物までの距離を演算する演算部と、を備える。
(もっと読む)
物体検出装置
【課題】光学窓の汚れを検出するための受光素子を設けることなく、光学窓の汚れを検出できるようにする。
【解決手段】鉛直下方向を含む面内を走査するようにレーザー光の向きを変化させて光学窓を介して照射するとともに、レーザー光が物体に反射した反射光を光学窓を介して受光するレーザーセンサ10を備え、レーザー光の照射方向を鉛直下方向に変化させて、路面に反射した反射光が検出されたか否かに基づいて光学窓の汚れを判定する(S202〜S216)。
(もっと読む)
距離センサ及び距離画像センサ
【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1BKと表面1FTとを有する半導体基板1A、電極TX1,TX2、半導体領域FD1,FD2、及び半導体領域SR1を備える。半導体基板1Aには、入射光に応じて電荷が発生する光感応領域が表面1FT側に設けられている。半導体領域FD1,FD2は、光感応領域にて発生した電荷を蓄積する。電極TX1,TX2は、光感応領域にて発生した電荷を半導体領域FD1,FD2に転送する。半導体領域SR1は、半導体基板1Aにおける半導体領域FD1,FD2と光入射面1BKとの間に位置すると共に、光入射面1BKに直交する方向から見て、半導体領域FD1,FD2を覆うように形成されており、半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
監視方法及び監視装置
【課題】監視範囲が遠距離まで設定されている場合であっても、精度よく監視範囲内における物体を検出することができる監視方法及び監視装置を提供する。
【解決手段】レーザ光を投光する投光部11と、レーザ光を垂直方向に走査させる垂直スキャナ12と、レーザ光を水平方向に走査させる水平スキャナ13と、レーザ光の反射光を受光して受光情報d4を発信する受光部14と、受光情報d4から物体の距離を算出する距離演算部15と、投光部11、垂直スキャナ12及び水平スキャナ13の制御を行う制御部16と、を有し、監視範囲Sは水平スキャナ13の上死点又は下死点を基準にして設定され、垂直スキャナ12は水平スキャナ13よりも走査速度が高速に設定されている。
(もっと読む)
距離センサ及び距離画像センサ
【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1FTと裏面1BKとを有する半導体基板1A、電極TX1,TX2、半導体領域FD1,FD2、及び半導体領域SR1を備える。半導体基板1Aには、入射光に応じて電荷が発生する光感応領域が光入射面1FT側に設けられている。半導体領域FD1,FD2は、光感応領域にて発生した電荷を蓄積する。電極TX1,TX2は、光感応領域にて発生した電荷を半導体領域FD1,FD2に転送する。半導体領域SR1は、半導体基板1Aにおける半導体領域FD1,FD2と裏面1BKとの間に位置すると共に、裏面1BKに直交する方向から見て、半導体領域FD1,FD2を覆うように形成されており、半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
パノラマ画像作成方法及び3次元レーザスキャナ
【課題】測定範囲に対応するパノラマ画像中のコントラストが最適となる様にするパノラマ画像作成方法及びパノラマ画像中のコントラストが最適となる画像データを取得する。
【解決手段】測定対象物72,73,74を含む様に測定範囲70を設定し、測定範囲を所要分割して複数の区画71を設定し、各区画毎に撮影した画像を合成してパノラマ画像80を作成するパノラマ画像作成方法に於いて、各区画毎に複数の撮像条件で撮影し、少なくとも測定対象物については、最適な撮像条件で撮影された画像が用いられてパノラマ画像が合成される。
(もっと読む)
距離測定器及びその製造方法
【課題】低コストで製造され、小型で、検出する光量の損失が少なく、高精度に測定を行うことができる距離測定器を提供する。
【解決手段】光源1は、ホルダ81に固定され、レーザ光Lを射出する。有孔ミラー2は、光源1から射出されるレーザ光1の光軸に対して傾斜し、光源1からレーザ光Lを照射される照射領域Aが、光軸方向から見てレーザ光Lのファーフィールドパターンとなるように、ホルダ81に対して空間的に固定されたホルダ82に固定され、照射領域Aに、レーザ光Lに対して光学的に阻害がない透過部20を有する。走査部3は、透過部20を透過したレーザ光Lを、被測定物7に向けて反射させる。検出部5は、被測定物7において反射し、有孔ミラー2において反射したレーザ光Lを検出する。処理部6は、光源1及び検出部5の駆動を制御し、検出部5の出力に基づいて被測定物7までの距離を算出する。
(もっと読む)
光波距離測定装置
【課題】視準方向の変更を招くことなく所望の位置の測定を可能とする光波距離測定装置を提供する。
【解決手段】光源(31)からの出射光(Es)を目標物へ向けて出射するとともに入射した目標物からの反射光(Rs)を受光部(60)で受光し、出射光と反射光とに基づいて距離測定を行う光波距離測定装置10である。光源から目標物への照射光軸Liに至る光路には、光源の出射光軸Leに対して出射光の方向を傾斜させるべく反射させる偏向反射機構(34)が設けられ、偏向反射機構は、光源から見て偏向反射機構よりも目標物側の出射光軸上もしくは照射光軸Li上の所定位置(E)と光学的に共役の関係とされている。
(もっと読む)
光調整装置、光検出装置、及び距離測定装置
【課題】入射光が著しく強い場合があっても、信号光を正しく検出することができるようにする。
【解決手段】光分離器62によって、反射光パルスを分離し、PD64によって、分離された反射光パルスの一方を検出する。作動制御回路70によって、PD64からの検出信号が閾値以上である場合に、光を遮断するように光調整器68を作動させる。一方、分離された反射光パルスの他方が、延滞機構66を通過して、光調整器68が作動したころに光調整器68に入射される。
(もっと読む)
41 - 60 / 523
[ Back to top ]