
Fターム[5J084BA21]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 投光波長に関するもの (338) | 多波方式(マルチウェーブ方式) (45)
Fターム[5J084BA21]に分類される特許
1 - 20 / 45
距離計測装置
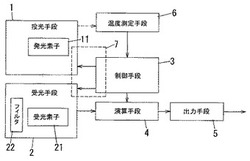
【課題】発光素子の温度変化に対する計測精度の変化を抑制する。
【解決手段】投光手段1は、対象空間に投光する発光素子11を備え、受光手段2は、対象空間からの光を受光する受光素子21を備える。制御手段3は、投光手段1に変調信号を与えて発光素子11から時間経過に伴って強度が変化する変調光を投光させ、変調信号に同期する復調信号を受光手段2に与えて受光素子21の出力から変調光の成分を抽出する。演算手段4は、投光手段1から対象空間に投光された変調光が受光手段2に受光されるまでの時間を計測することにより、対象空間に存在する物体までの距離を算出する。温度測定手段6は、発光素子11の温度を計測し、精度維持手段7は、温度測定手段6が計測した温度が高いほど発光素子11の駆動電流を大きくし、発光素子11の温度変化に対して受光素子21に入射する変調光の変化を抑制する。
(もっと読む)
雲の含水率を決定する方法

【課題】雲の含水率を決定する方法を提供する。
【解決手段】雲の含水率は、雲の水滴サイズ分布から導出される。雲の水滴のサイズ分布を決定する方法は、雲の深さを電磁放射ビームによりサンプリングすることと、雲から戻った電磁放射のエコー強度を検出器により測定することと、測定エコー強度から測定光減衰係数を決定することと、測定エコー強度から測定後方散乱係数を決定することと、測定光減衰係数及び測定後方散乱係数からライダー比を決定することと、ライダー比から水滴の形状パラメータ(μ)及びメジアン体積径(DMVD)を含む値ペアを決定することと、値ペア(μ,DMVD)を使用して水滴のサイズ分布を決定することとを含む。
(もっと読む)
位置確認システム
【課題】利用者による特別な動作が無くても利用者の位置を確認することが可能な位置確認システムを提供する。
【解決手段】位置確認システム1Aにおいて、発光装置20は、当該発光装置に固有の信号が含まれるように変調された光を発光し、受光装置30Aは、反射装置で反射した光を受光したときに、受光した光に含まれる信号を制御装置40へ出力し、制御装置40は、発光装置20に固有の信号と当該発光装置20の設置場所とが関連付けて記憶された記憶部41と、受光装置30Aから出力された信号を用いて記憶部41を参照することによって、信号に関連付けられた設置場所を記憶部41から読み出す位置確認部42と、を備える。
(もっと読む)
距離計測方法および装置
【課題】 本発明は,複数の周波数を発振する光源からの光を光変調器を用いて光ビートダウンして,低周波にて位相検出することにより、装置コストを上げずに測定精度高めることを目的とする。
【解決手段】 本発明は複数の異なる周波数の光を発振する光源と、前記光源からの光と、測定対象に照射されてから反射された前記光源からの光との周波数を変調する光変調器と、前記光変調器に電圧信号を入力する発振器と、前記光変調器により変調された光信号を検出する検出器と、前記検出器により検出された光信号の位相から距離を算出する距離演算回路とを備えることを特徴とする距離計測装置を提供する。
(もっと読む)
移動体方向検知装置
【課題】移動体の方向を更に正確に2次元的に検知する移動体方向検知装置を提供する。
【解決手段】所定時間間隔をおいて周波数の異なる複数のパルスレーザ光を移動体に向けて照射し、移動体及びその背景からの反射光を受光する直線状のスリットに対して垂直方向に往復駆動されるマスクと、このマスクを通過した光を分光し、2次元に配列された複数の光センサ素子から成り、分光された光を受ける2次元センサと、スリットの行方向の各波長の光の強度累計値を求め、背景からの光から識別できるパルスレーザ光の反射光を検知し、マスクの往復駆動の方向と直角な方向の2次元センサにおける光センサ素子の列の受光強度の累積値によりパルスレーザ光の波長の強度の最大な列を求め、求められた強度最大列及び検知された反射光の最も強度の大きい累積値が得られるマスクの往復の位置及びこの往復の方向に対して垂直な2次元センサの位置により移動体の方向を検知する。
(もっと読む)
レーザ測量機
【課題】簡便に点群データ取得の高速化を可能にするレーザ測量機を提供する。
【解決手段】異なる波長のパルス測距光10a,10bを発する複数の発光源8a,8bを有する光源部2と、各波長毎に時分割して発光させるパルス駆動部9と、前記複数の波長のパルス測距光10a,10bを光軸13上に射出する投光部3と、前記光軸13上に設けられ、前記パルス測距光10a,10bの各波長のみを反射する反射面を複数有し、前記パルス測距光10a,10bを波長毎に分割して測定対象物に向ける様偏向する偏向部材11と、前記測定対象物からの反射測距光10a’,10b’を受光する1つの受光素子12とを有し、該受光素子12からの受光信号24から各パルス測距光10a,10b毎に測距を行う。
(もっと読む)
測距方法及びレーザ測距装置
【課題】一つのレーザ照射手段を用いて高精度の測距が可能な測距方法及びレーザ測距装置を提供することを目的とする。
【解決手段】本発明に係る測距方法及びレーザ測距装置は、波長の異なる複数のレーザ照射手段を用いるのではなく、スペクトル線幅が比較的広く多縦モード発振するレーザ照射手段を利用して測距を行う。このため、高精度の測距が可能でありながらレーザ照射手段が一つで良く、レーザ測距装置の光学系の作製をより容易に行うことができる。
(もっと読む)
自動目標検出を有する座標測定装置
距離測定装置および距離測定方法
【課題】
光コムを用いた距離測定装置において、光量不足、多数の自己ビートから必要なビートのみを信号雑音比(SN比)よく抽出することが困難であるという課題を解決し、反射率が低い表面または表面が散乱面である10m程度遠方の被測定物までの絶対距離を0.1mm以上の精度で光学的で非接触な手法により簡便に測定できるようにする。
【解決手段】
対象物までの距離を測定する距離測定装置において、光源と対象物で反射または散乱された複数のCWレーザーの間のビート信号のビート信号の位相と,光源と対象物へ照射する前の複数のCWレーザーによるビート信号のビート信号の位相を比較することによって対象物までの距離を測定するようにした。
(もっと読む)
光波距離計
【課題】測距光の変調周波数を上げることなく測定精度を上げることができる光波距離計を提供する。
【解決手段】変調された可視測距光(L1)を出射する可視発光素子(108)と、可視測距光を受光して電気信号を発生する可視受光素子(109)と、可視受光素子からの電気信号で変調された赤外線等の非可視測距光(l2)を出射する非可視発光素子(114)と、非可視測距光を受光して電気信号を発生する非可視受光素子(115)とを備える。
(もっと読む)
地表面観察方法
【課題】レーザによる計測のみで土地被覆を判断し、さらに、必要に応じて、土地表面形状を求めることのできる地表面観察方法の提供を目的とする。
【解決手段】飛行体1から地上への多波長のレーザ掃引によって地上から反射した異なる波長成分を有する適数の反射パルスを判定単位として、各判定単位における波長-反射強度分布を基準に判定単位群を適数に分類し、
各判定単位に物性に関連付けられた狭域属性2を付与して土地被覆状態を観察する。
(もっと読む)
飛行時間範囲探知システムのための複数の同期化光源
TOFシステムの光パワーが、ワイヤレスとすることができる補助光放出器(WOE)ユニット、またはプラグ有線接続とすることができる補助光放出器(PWOE)を使用して増大される。WOEユニットは、放出されたTOFシステムの光エネルギーSoutを感知し、周波数および同位相に関してWOEによって受け取られるときのSoutに好ましくは動的に同期された光エネルギーSout−nを放出する。各WOEは、Soutを検出するための少なくとも1つの光センサーと、WOEの放出したSout−n光エネルギーの周波数および位相がTOFの放出したSout光エネルギーの周波数および位相に動的に同期されることを保証する内部フィードバックとを含む。PWOEユニットは内部フィードバックを必要としないが、PWOE放出の光エネルギーの周波数および位相とTOFシステムの一次光源によって放出されるものとを精密に一致させるようにTOFシステムによって較正される。PWOEが別個に使用される場合、PWOEとTOF一次光エネルギー光源との間の遅延差はソフトウェア補償することができる。  (もっと読む)
(もっと読む)
測距方法及びレーザ測距装置
【課題】演算部に対する負荷を抑えながら高精度の測距が可能な測距方法及びレーザ測距装置を提供することを目的とする。
【解決手段】本発明に係る測距方法及びレーザ測距装置は、合成光の強度をモニタして、所定の強度以上のピーク位置の前後における強度データの対称性を確認することで、被測定物の測定点と対応する反射点の位置情報を取得する。そして、その位置情報に基づいて被測定物までの距離もしくは被測定物の2つの測定点間の厚み方向の距離を測距する。従って、強度データに基づく演算量を低減することが可能となり、演算部に対する負荷を抑えながら、レーザ光の可干渉性を利用した高精度な測距を行うことができる。
(もっと読む)
小さいフォームファクタの距離センサ
本明細書に開示する主題は、モバイルデバイスからリモートオブジェクトまでの距離、またはリモートオブジェクトのサイズを決定することに関する。
本発明は、回転可能なマイクロリフレクタを回転させてエネルギーをリモート表面に向ける段階であって、前記回転可能なマイクロリフレクタがモバイルデバイス中に配置され、前記回転させることが前記モバイルデバイスに関係する段階と、前記向けられたエネルギーの結果として生じる前記リモート表面からの反射エネルギーに少なくとも部分的に基づいて距離を測定する段階とを含む。  (もっと読む)
(もっと読む)
光波距離計
【課題】温度位相ドリフトを低減するとともに誤差を小さくしながら遠距離測定できる光波距離計を提供する。
【解決手段】複数の主変調周波数F1、F2、F3で変調された第1の発光素子13と、前記各主変調周波数それぞれに近接した複数の傍変調周波数F1−Δf1、F2−ΔF2、F3−Δf3で変調された第2の発光素子14と、両発光素子から出射された光を受光する第1、第2の受光素子40、50と、第1の受光素子に接続された第1の周波数変換器群42、44、46と、第2の受光素子に接続された第2の周波数変換器群52、54、56とを備え、主変調周波数及び傍変調周波数は、それぞれの中で最も周波数の低いものF3、F3−Δf3と近接した周波数の主変調周波数F3−F4及び傍変調周波数F3−F4−Δf4に変更でき、近接法によって近接した2つの主変調周波数の差となる変調周波数F4を用いた場合の目標反射物22までの距離も算出する。
(もっと読む)
画像センサとその画像センサに用いられる受光装置
【課題】 距離画像データと部位判別画像データの双方を取得可能な画像センサを提供すること。
【解決手段】 画像センサ100は、照射装置20と撮像装置40と演算装置60を備えている。照射装置20は、第1波長光を照射する第1光源22と、第2波長光を照射する第2光源を有する。演算装置60は、少なくとも第1波長光が照射装置20から対象物で反射して撮像装置40に到達するまでの距離に基づいて距離画像データを演算する。演算装置60はさらに、対象物における第1波長光の第1反射光の反射特性と対象物における第2波長光の第2反射光の反射特性の差に基づいて部位判別画像データを演算する。
(もっと読む)
追跡方法、および、レーザートラッカを有する測定システム
反射器(17)が設けられた標的(9)が、レーザートラッカ(10)を含む測定システムにおいて追跡される。反射器(17)は、通常追跡モードにおいて追跡ユニット(11)により追跡され、特別追跡モードにおいて概観装置(13)により追跡される。追跡ユニット(11)の検出領域と概観装置(13)の検出領域との間にある検出領域を有する捕捉ユニット(12)も存在する。標的(9)を追跡ユニット(11)によっては検出できないが、捕捉ユニット(12)により検出可能である場合、追跡ユニット(11)の方向は、捕捉ユニット(12)による測定に従って制御される。そして、標的(9)を追跡ユニット(11)によっては検出可能である場合、通常追跡モードへの遷移が開始される。標的(9)を概観装置(13)のみにより検出可能である場合、追跡ユニット(11)の方向は、概観装置(13)の測定に従って制御される。  (もっと読む)
(もっと読む)
レーザ画像計測装置
【課題】小型で低コスト、かつ高い解像度で高速に対象物の3次、2次元画像を計測できるレーザ画像計測装置を得る。
【解決手段】CW変調信号を発生する発振器1と、レーザ光を発生するレーザ装置2と、変調信号に基づきレーザ光に強度変調をかける変調器3と、レーザ光を走査して照射し、走査角度を発生するレーザ光走査光学系4と、対象物からの反射光を集光する受信光学系5と、レーザ走査範囲における対象物の多点の反射光を受信することができる口径を持ち、反射光を電気信号に変換する受光器6と、前記変調信号の位相と受光器6で得られた反射光の電気信号の位相との位相差を検知する位相検波装置7と、この位相検波装置7によって得られた位相差から前記対象物までの距離を演算する距離演算装置8と、前記走査角度及び距離から2次、3次元画像を生成する画像処理装置9とを設けた。
(もっと読む)
距離画像撮影装置
【課題】正確な距離画像の撮影を可能とする距離画像撮影装置を提供する。
【解決手段】撮像空間内に向けて光波を照射し、当該光波を照射された当該撮像空間内の物体からの反射波の伝搬遅延時間に基づいて物体までの距離を示す距離画像を撮像する距離画像撮影装置であって、異なる波長帯の複数の光波を他の物体に向けて発光する光波照射手段と、複数の光波の反射波を波長帯毎に受光し、各反射波の受光量を検出する受光手段と、複数の光波各々の伝搬遅延時間を算出する遅延時間算出手段と、受光した反射波の受光量の大きさを各々比較して、当該受光量の大小を判定する受光量判定手段と、少なくとも、受光手段における受光量が最も大きい波長帯の光波の伝搬遅延時間に基づいて物体までの距離を算出する距離算出手段と、距離算出手段により算出された物体までの距離に基づいて距離画像を生成する距離画像生成手段とを備える、距離画像撮影装置。
(もっと読む)
光学距離センサー
【課題】 高い感度を備えると共に、反射に関して波長選択性を有する距離測定目標物であっても、正確に距離を測定することができる光学距離センサーを提供する。
【解決手段】 発光部11と、上記発光部から光を照射して距離測定目標物17で反射した光を受光する受光部12と、上記発光部からの発光信号及び上記受光部の受光信号の位相差に基づいて、距離測定目標物までの距離を演算する制御部13と、を含むタイムオブフライト方式の光学距離センサー10において、上記発光部が、互いに異なる複数の色の光を互いにタイミングをずらして発光し、上記受光部が、上記距離測定目標物からの反射光をそのまま受光して、積算するように、光学距離センサー10を構成する。
(もっと読む)
1 - 20 / 45
[ Back to top ]