
Fターム[5J084BA33]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 受光系に関するもの (1,335) | 受光素子の種類に関するもの (797) | PSD(入射位置検出器) (106)
Fターム[5J084BA33]に分類される特許
21 - 40 / 106
自動目標検出を有する座標測定装置
レーザ測定装置
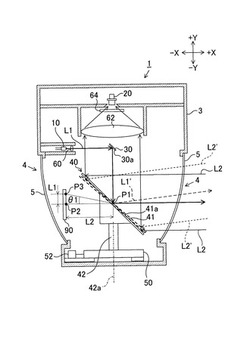
【課題】レーザ光の走査方向を様々な向きに変化させやすく設置場所に応じた多様なエリア設定が可能な構成をより小型且つ簡易に実現する。
【解決手段】レーザ測定装置1は、偏向部41を中心軸42aに対して相対的に変位させることで、空間に照射されるレーザ光L1の水平面に対する傾斜角度を変化させる傾斜角度変更部100を備え、更に、偏向部41からのレーザ光L1の走査経路上に配置される受光面91を備え、当該受光面91に入射するレーザ光L1の入射高さを検出する受光センサ90が設けられている。そして、レーザダイオード10にてレーザ光L1が発生してから当該レーザ光L1に応じた反射光がフォトダイオード20によって検出されるまでの経過時間を検出すると共に、その経過時間と受光センサ90によって検出された入射高さとに基づいて検出物体の位置を検出するように構成されている。
(もっと読む)
測距センサおよび電子機器

【課題】周辺光による誤測距または誤検知を回避することができる測距センサを提供する。
【解決手段】測距センサ1は、第1信号光Rf1を出射する第1発光素子11と、第2信号光Rf2を出射する第2発光素子12と、第1信号光Rf1または第2信号光Rf2を受光して受光信号を出力する受光素子部20とを備える。第1発光素子11および第2発光素子12は、受光素子部20の光軸20bと交差する平面上に配置され、第1発光素子11は、平面上で受光素子部20の光軸20bに対して第1方位に配置され、第2発光素子12は、平面上で受光素子部20の光軸20bに対して第1方位とは異なる第2方位に配置されている。これによって、周辺光による誤測距または誤検知を回避することができる。
(もっと読む)
干渉計
【課題】移動体までの距離を安全に測定することができる干渉計を提供すること。
【解決手段】干渉計1Aは、干渉計1Aから射出される光の光量を調整可能に構成された調光手段3Aと、受光手段47,49の受光量が所定の第1閾値以下か否かを判定する第1判定手段と、第1判定手段が、受光量が第1閾値以下と判定した場合、調光手段3Aに、干渉計1Aから射出される光の光量の低減を命じる低減信号を出力する低減信号出力手段とを備える。調光手段3Aは、低減信号が入力された場合、光源から射出される光の光量を低減させる。従って、干渉計1Aが反射体101を見失ってしまった場合、調光手段3Aが干渉計1Aから射出される光の光量を低減させることとなるので、干渉計1Aの周囲で作業する人に干渉計1Aから測定光が照射されてしまうことを防止でき、移動体2までの距離を安全に測定できる。
(もっと読む)
追尾式レーザ干渉測長計
【課題】回転機構の回転角度を適切に取得することができる追尾式レーザ干渉測長計の提供。
【解決手段】追尾式レーザ干渉測長計1は、第1の再帰反射体としての測定基準器2と、被測定物Wに取り付けられる第2の再帰反射体としてのターゲット3と、測定基準器2にレーザ光源から出射される光を導くとともに、測定基準器2にて反射された光を出射する本体部4と、測定基準器2を中心として本体部4を回転させる回転機構5と、回転機構5を制御する制御装置6とを備える。本体部4は、測定基準器2にて反射された光を受光し、受光した光の位置を検出する二次元PSDを備える。制御装置6は、回転機構5の回転角度を取得する角度取得部63と、二次元PSDにて検出される光の位置に基づいて、角度取得部63にて取得される回転機構5の回転角度を補正する角度補正部64とを備える。
(もっと読む)
レーザ照準機構
レーザトラッカまたはレーザスキャナとともに使用するための照準デバイスは、トラッカまたはスキャナ制御システムとトラッカまたはスキャナ装置とを含むとよい。トラッカ装置は、レーザを操作する機構へトルクを印加するように構成された複数のモータと、機構の角度位置についてのフィードバック情報をトラッカ制御システムへ送るように構成された複数の角度エンコーダとを含むとよい。トラッカまたはスキャナ制御システムは、照準デバイスが手動調節モードで作動している時にトラッカまたはスキャナ制御システムが複数のモータを制御してユーザにより引き起こされた移動の方向と反対に機構へトルクを付与するように構成されるとよい。 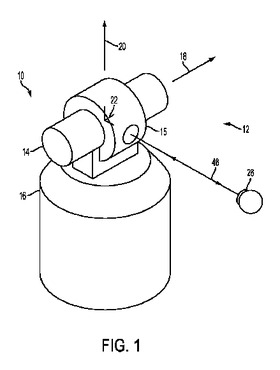 (もっと読む)
(もっと読む)
ビーム照射装置
【課題】シリンドリカルレンズ等のビーム整形用レンズを用いることなく、所望の形状のビームを目標領域に照射可能なビーム照射装置を提供する。
【解決手段】 レーザ光を出射するレーザ光源410と、レーザ光源410から出射されたレーザ光が入射される収束レンズ430と、収束レンズ430を透過したレーザ光を目標領域において走査させるためのミラーアクチュエータ100を備える。レーザ光源100は、レーザチップのpn接合面が鉛直方向に平行となるように配される。レーザ光源100の発光部の鉛直方向に平行な方向の長さによって、目標領域における前記レーザ光の鉛直方向の長さが設定される。
(もっと読む)
動体判別機能付き電子機器
【課題】 動体を正確に判別することができるコンパクトな電子機器を提供する。
【解決手段】 動体しきい値記憶手段104の動体しきい値を、測定対象物までの距離が遠い場合には大きく、測定対象物までの距離が近い場合には小さくなるように、測定距離範囲毎に予め設定する。動体判定手段106は、測距値の最大値と最小値の差が所定の動体しきい値よりも大きい場合に測定対象物が動体であると判定する。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】シリンドリカルレンズ等のビーム整形用レンズを用いることなく、安定したビームプロファイルにて、ビームを目標領域に照射可能なビーム照射装置を提供する。
【解決手段】レーザ光を出射するレーザ光源410と、レーザ光源410から出射されたレーザ光が入射される収束レンズ430と、収束レンズ430を透過したレーザ光を目標領域において走査させるためのミラーアクチュエータ100を備える。レーザ光源410は、レーザチップのpn接合面が鉛直方向に平行となるように配される。レーザ光源410の発光部の鉛直方向に平行な方向の長さによって、目標領域におけるレーザ光の鉛直方向の長さが設定される。また、レーザ光に対する収束レンズ430の波面収差が0.15λrms以下に設定されている。
(もっと読む)
ミラーアクチュエータおよびビーム照射装置
【課題】回動軸における摩擦や不要な制動力を抑制でき、ミラーの回動性能を高めることができるミラーアクチュエータおよびこのミラーアクチュエータを搭載したビーム照射装置を提供する。
【解決手段】ミラーアクチュエータ100は、マグネットユニット130と、マグネットユニット130に固定された支軸111と、支軸111に回動可能に軸支されたチルトユニット110と、チルトユニット110に固定され支軸111に垂直な支軸125と、支軸125に回動可能に軸支されたパンユニット120と、パンユニット120に装着されたミラー140とを備える。チルトユニット110とパンユニット120は、それぞれ、支軸111と支軸125を1ヵ所で軸受けする軸受部112と軸受部122を有する。
(もっと読む)
追跡方法、および、レーザートラッカを有する測定システム
反射器(17)が設けられた標的(9)が、レーザートラッカ(10)を含む測定システムにおいて追跡される。反射器(17)は、通常追跡モードにおいて追跡ユニット(11)により追跡され、特別追跡モードにおいて概観装置(13)により追跡される。追跡ユニット(11)の検出領域と概観装置(13)の検出領域との間にある検出領域を有する捕捉ユニット(12)も存在する。標的(9)を追跡ユニット(11)によっては検出できないが、捕捉ユニット(12)により検出可能である場合、追跡ユニット(11)の方向は、捕捉ユニット(12)による測定に従って制御される。そして、標的(9)を追跡ユニット(11)によっては検出可能である場合、通常追跡モードへの遷移が開始される。標的(9)を概観装置(13)のみにより検出可能である場合、追跡ユニット(11)の方向は、概観装置(13)の測定に従って制御される。  (もっと読む)
(もっと読む)
2次元及び3次元位置検出システム、及びそのセンサ
2次元及び3次元の位置検出システム、ならびにそのシステムで使用されるセンサが開示される。センサは、線形アレイセンサ、及び、光又は他の放射線がセンサの大部分の素子に到達するのを遮るための開口プレートを内包する。相対的な放射線源の方向が、各センサの内の放射されたセンサ素子に基づいて、決定される。センサは、放射線源の位置を推定可能とするために、システム内に組み合わされる。 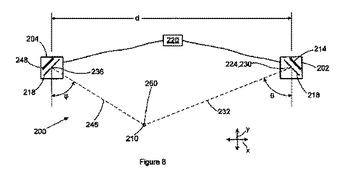 (もっと読む)
(もっと読む)
レーザ測距装置及びレーザ測距方法
【課題】ポインティングリファレンスを簡単な構成で走査範囲内に設置する。
【解決手段】レーザビームを第1及び第2のミラーで2次元に走査するレーザ測距装置において、前記レーザビームの送信側の前記第2のミラーは前記レーザビームを部分的に透過するミラーであり、前記第2のミラーを透過したリファレンス用レーザビームを当該第2のミラーに反射する第3のミラーと、前記第3のミラーで反射され、前記第2のミラーの裏面で反射された前記リファレンス用レーザビームを集光する集光光学系と、前記集光光学系で集光された前記リファレンス用レーザビームを検出する2次元アレイ状の検出器と、を更に備え、前記第1のミラー及び前記第2のミラーの角度情報と前記検出器の検出信号とに基づいて規定値からの変位量を計算し、前記変位量に基づいて前記第1のミラー及び前記第2のミラーの角度を校正する。
(もっと読む)
反射型光電センサ
【課題】不感帯を縮小することができる反射型光電センサを提供する。
【解決手段】反射型光電センサは、第1の投光素子2からの光を被検出対象(図示せず)に投光する投光レンズ1と、第1の投光素子2から出射され前記被検出対象により反射される光を受光する受光素子4と、第1の投光素子2と受光素子4との間に配置され前記被検出対象に投光する第2の投光素子7と、一面に第1の投光素子2からの光を外部に出射するための第1の窓部16aおよび前記被検出対象により反射される光を内部に入射させ受光レンズ3を介して受光素子4に入射させるための第2の窓部16bを有するセンサボディ6とを備える。受光レンズ3が、投光レンズ1の焦点距離よりも焦点距離が短く設定され且つ第1の投光素子2の光軸方向に沿った方向において投光レンズ1よりも受光素子4側に位置する。
(もっと読む)
追尾式レーザ干渉測長計
【課題】入射面のゴミの影響を受け難く、基準球の表面の傷に対してロバストであり、基準球の局所的な真球誤差の影響を受け難くする。
【解決手段】固定位置に配設された透明な基準球614と、移動体に配設された再帰逆反射体(620)と、基準球の中心を中心として回動するように設計されたキャリッジ630と、キャリッジに固定配設され、再帰逆反射体と基準球の間でレーザビーム(642)を往復させる光学系を含み、再帰逆反射体と基準球の間の距離を干渉測長する測長手段(640)と、キャリッジに固定配設され、再帰逆反射体の入射光と反射光の光軸のずれ量に応じた信号を出力する追尾用位置検出手段660と、光軸のずれ量がゼロとなるようにキャリッジの回動を制御する制御部670とを備えた追尾式レーザ干渉測長計において、基準球に入射されるレーザビームが、基準球の中心Oに焦点を結び、入射側と反対の内側球面で反射されるようにする。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を示す信号を精度良く検出することにより、レーザ光の走査精度を高め得るビーム照射装置を提供する。
【解決手段】S/H回路34は、サンプルタイミングごとに入力電圧信号をホールドし、ホールド電圧信号を減算器35に出力する。減算器35は、入力電圧信号から、ホールド電圧信号を減算した減算電圧信号を、端子32bおよび比較回路36に出力する。A/D変換回路38は、減算電圧信号を、S/H回路34におけるサンプルタイミングに同期してデジタル信号に変換し、PSD処理回路7に出力する。こうすると、A/D変換回路38の分解能が有効に活用されるため、A/D変換回路38から入力される信号に基づいて信号演算回路7bにて位置検出信号を生成することにより、位置検出信号の精度が高められ得る。
(もっと読む)
ビーム照射装置および位置検出装置
【課題】簡素な構成にて目標領域におけるレーザ光の走査位置を精度良く検出できるビーム照射装置を提供する。
【解決手段】レーザ光源から出射されたレーザ光は、ミラーに入射する。アクチュエータは、レーザ光が入射するミラーを回動させることにより、目標領域においてレーザ光を走査する。一方、半導体レーザ303から出射されたサーボ光は、ホログラム素子200に入射する。ホログラム素子200は、ミラーの回動に伴って回動し、出射面には、回折パターンが設定されている。光検出器309は、ホログラム素子200を透過したサーボ光を受光して、その受光位置に応じた信号を出力する。こうすると、光検出器309に入射するサーボ光の走査幅が広げられるため、光検出器309上におけるサーボ光の受光位置が精度良く検出される。結果、目標領域におけるレーザ光の走査位置も精度良く検出され得る。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】目標領域に対するレーザ光の照射精度を高く維持しながら、制御回路の処理負担を軽減できるビーム照射装置およびレーザレーダを提供する。
【解決手段】スキャン制御部1aは、Tilt方向におけるミラー制御の半分の頻度で、Pan方向におけるミラー制御を行う。また、スキャン制御部1aは、PSD308上に設定された目標軌道上のQn、Qn+1、…に対応する位置にサーボ用レーザ光の実測位置が到達したことに応じて、レーザ光源401をパルス状に発光させる。これにより、走査用レーザ光は、サーボ用レーザ光の実測位置がQn’、Qn+1’、…に到達したタイミングで、目標領域に照射される。こうすると、Pan方向におけるミラー制御をラフに行いながら、略一定振り角毎に、走査用レーザ光を目標領域に照射できる。
(もっと読む)
光学デバイス、この光学デバイスを用いた物体検出方法及び電子機器
【課題】検出対象物の近接を検出できる光学デバイス、これを用いた物体検出方法及び電子機器を提供する。
【解決手段】赤外LEDと、反射光の光量及びスポット位置を示す信号を出力するCMOSイメージセンサと、出力された信号をアンプするとともに信号処理を実施する信号処理部20と、反射率ごとの検出物距離と受光量との関係、第1基準値及び第2基準値を示すデータが格納されたデータベース記憶部30とを備えたものであり、信号処理部20は、スポット位置に基づいて検出物距離を算出する第1信号処理と、検出物距離及び反射光の光量を反射率ごとの検出物距離と受光量との関係と比較して検出物の反射率を求める第2信号処理と、当該反射率が第1基準値と一致するか判断する第3信号処理と、一致する場合に検出物距離が第2基準値と一致するか判断する第4信号処理と、一致する場合に検出対象物の近接を示す信号を出力する第5信号処理とを実施する。
(もっと読む)
光電センサ及び光通過時間原理により距離を測定する方法
【課題】光通過時間原理により、高い時間的精度で距離測定するための、コスト的に有利な可能性を提供する。
【解決手段】10MHzのマスターサイクルから、周波数f1=400MHzないし周波数f2=410MHzの分割サイクルをつくる。差分周期の任意の倍数をつくり出すために、時間ベースユニットが、周波数f2のn番目の周期及び周波数f1のm番目の周期から成るペアを選ぶ。各ペアの位置はマスターサイクルに対して固定されており、例えばn=2及びm=6が4/f2+6ΔTの時間インターバルに相当し、1/f2=41ΔTである。そこでは、100ns経過して同期が起きるたびにカウンタがリセットされ、ペアの番号付けが最初から始まる。二つの周波数f1及び周波数f2に基づいて、検知区分よりもはるかに細かい時間ベースを使用できる。
(もっと読む)
21 - 40 / 106
[ Back to top ]