
Fターム[5J084BB20]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学要素 (2,698) | その他の光学フィルタ (168)
Fターム[5J084BB20]に分類される特許
81 - 100 / 168
ビーム照射装置およびレーザレーダ

【課題】位置検出信号に対するレーザ光(外乱光)の影響を抑制し、位置検出精度を高めることができるビーム照射装置およびレーザレーダを提供する。
【解決手段】PSD308からの出力信号に基づいてサーボ光の受光位置に応じた信号を生成するPSD信号処理回路3と、PSD信号処理回路308からの信号に基づいてレーザ光の走査位置を検出するDSP8を備える。DSP8は、レーザ光の発光期間以外の期間(位置検出期間)においてレーザ光の走査位置の検出を行う。
(もっと読む)
移動体用照明装置

【課題】照明装置内部のスペースの問題や意匠上の問題等を解決する移動体の周辺情報を検出する手段を備えた移動体用照明装置を提供する。
【解決手段】移動体用照明装置は、光源と、ハウジングと、カバーと、情報検出手段と、反射板とを備える。ハウジングは光源の光を移動体周辺に照射するための開口部を有し、光源を収容する。カバーは、開口部を塞ぎ、光源の光を透過する。情報検出手段は、ハウジングの底面に埋設され、移動体周辺に所定波長の電磁波を出射することにより移動体の周辺情報を検出する。反射板は、カバーと光源との間に配設される。また、反射板は、電磁波がカバーを通じて移動体周辺に出射されるように電磁波を反射し、かつ、光源が照射する可視光を透過する。
(もっと読む)
船舶の航路上の物体の検知と画像化のシステム
高速船舶及び他の船舶の航路内の物体(16)の検知と画像化及び、航海安全にリスクとなる物体の警告システムであって、船舶は航行及び通信システム(28)を備え、物体のレーザ照明用の走査ユニット(10)、制御ユニット(11)、オペレータパネル(12)を有する。走査ユニットは、システムの視野の内にレーザビーム(33)を放出するように調整された目に安全な赤外レーザの光源(30)と、レーザビームの出力パワーの監視と、物体までの距離の測定用のトリガパルスの生成と、反射放射エネルギーを受信/検知し、物体との距離を放射光と反射光の時間差に基づいて計測し、パルスエネルギーとピーク効果を計測し、第1(19)と第2(20)の走査機構により、レーザビームと光学検知器(38)の瞬時の視野を問題の走査領域に亘って走査し、船舶に対する瞬時の放射方向に関する方向情報を獲得する。 (もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査制御を簡易かつ高精度に行い得るビーム照射装置を提供する。
【解決手段】ミラー113が中立位置にあるときに、サーボ光が透明体200の入射面と出射面に垂直に入射するよう、半導体レーザ303と透明体200を配置する。これにより、サーボ光の走査軌跡が直線に近くなる。サーボ光の走査軌跡間の間隔を広げるには、透明体200をミラー113に平行に配置すると良い。こうすると、PSD308による照射位置検出の分解能を高めることができ、検出信号の品質を高めることができる。
(もっと読む)
ビーム照射装置
【課題】位置検出信号に対するレーザ光(外乱光)の影響を抑制し、位置検出信号の精度を高めることができるビーム照射装置を提供する。
【解決手段】PSD308からの出力信号に基づいてサーボ光の受光位置に応じた信号を生成するPSD信号処理回路3を備える。PSD信号処理回路3は、目標領域に照射されるレーザ光の一部がPSD308に入射することにより生じる外乱信号をPSD308からの出力信号から除去する信号除去回路15、16、17、18を有する。
(もっと読む)
距離画像センサ
【課題】多種多様なアプリケーションに対して、それぞれ適切な検出距離範囲を実現することができる距離画像センサを提供する。
【解決手段】光量調節部7は、投光部2から対象空間に投光される光量を調節することにより、受光部3で受光される光量を調節する。距離画像センサ1には手動設定部8が設けられ、光量調節部7で調節される光量はこの手動設定部8の操作に応じて設定される。ここに、検出距離範囲を近距離側にシフトする場合には、受光部3の飽和を回避するように投光部2からの光量を減少させ、また、検出距離範囲を遠距離側にシフトする場合には、受光部3の感度不足を回避するように投光部2からの光量を増加させることで、距離画像センサ1の検出距離範囲を変化させることができる。
(もっと読む)
距離測定装置
【課題】測定対象物までの距離によらず、測定対象物までの距離を精度良く測定することができる、距離測定装置を提供する。
【解決手段】光源から一定間隔で光パルスLDsを射出し、測定対象物までの距離に要する応答時間T後に反射光パルスSinを受光する。反射光パルスの強度Sinは距離に応じた減衰をし、反ファイバ増幅器で増幅される。励起光源からのポンプ光LDpの光出力は、光パルスLDsの立ち上がり時間をスタートとして、時間経過に従って直線的に増加し、受光期間経過直後にゼロとなり、休止時間Trの期間ゼロを維持する。この鋸歯状のポンプ光LDpで光ファイバ増幅器を励振することで、光パルスLDsが射出されてからの時間経過に応じて光ファイバ増幅器の光増幅率Gainが増加する。これにより、増幅された反射光パルスの強度Soutは測定対象物までの距離に依存しない一定値となり、距離をより高い精度で測定することができる。
(もっと読む)
光学的空気データシステムおよび方法
【課題】改良された、遠隔で空気を検知する方法および光学的に空気データを検知するシステムを提供すること。
【解決手段】遠隔で空気を検知する方法であって、該方法は、同調可能なレーザによってレーザ放射を生成することと、該レーザ放射を投射される成分およびコントロール成分にスプリットすることと、 該コントロール成分を1つ以上の電子的コントロール信号に変換することと、 該投射される成分を空気に投射して、散乱放射を誘発することと、該散乱放射の一部分を後方散乱放射として受信することと、該後方散乱放射を1つ以上の電子的後方散乱放射信号に変換することとを包含する、方法。
(もっと読む)
測距装置
【課題】防振機能付き測距装置の低コスト化を図ること。
【解決手段】測距装置1は、目標物体に向けレーザ光L1を投射する送信光学系10と、目標物体で反射した反射レーザ光L2を受光素子34により受光する受信光学系30とを備える。手ブレなどで光軸2,4が傾いたとき、送信光学系10に配設された防振レンズ14を駆動機構42によりM1のように変位させて光線を偏向する。駆動機構42に連動して受信光学系30に配設された防振レンズ32を駆動機構43によりM2のように変位させるが,M2はM1よりもラフな動作とする。
(もっと読む)
距離測定センサ及びそれを備えた立体カラーイメージセンサ
【課題】基板に垂直に形成されたフォトゲートを備えて光受光領域を拡張した距離測定センサ及びそれを備える立体カラーイメージセンサを提供する。
【解決手段】基板に第1不純物をドーピングして形成され、光を受けて光電荷を発生する光電変換領域と、前記基板に第2不純物をドーピングし、前記光電変換領域を挟んで互いに対向するように離隔して形成され、前記光電荷を集め保存する第1及び第2電荷保存領域と、前記第1及び第2電荷保存領域にそれぞれ対応して前記基板に所定の深さで形成される第1及び第2トレンチと、前記第1及び第2トレンチ内にそれぞれ形成される第1及び第2垂直フォトゲートとを有する。
(もっと読む)
センサーユニットを備え自立走行可能な床用集塵装置及び対象
【課題】この種の装置及び対象を光学的な三角計測システムを用いて障害物からの距離計測に関して遠方領域でも正確な距離計測ができるように、改良すること。
【解決手段】本発明は、電動モータ駆動の走行ローラ(3)、装置筺体、集塵コンテナ、及び装置カバー(6)を備えた自立走行可能な床用集塵装置(1)であって、床用集塵装置(1)が障害物検出ユニットを有し、障害物検出ユニットが光源(10、10’)と、反射光用の受光レンズ(12)状の光学素子及び光検出素子(11)を有する受光ユニット(E)とを有する三角計測システム(T)である床用集塵装置に関する。課題を解決するために、光ビームが受光ユニット(E)内で、受光レンズ(12)によって集光(コリメート)された後に、障害物(13、13’)までの実際の距離の大きさに応じて、光検出素子(11)上に入射する光ビームの変位が大きくなるように、割り振られるように制御される。
(もっと読む)
方位測定方法及び方位測定装置
【課題】光の放射角を走査することなく、対象物の方位を高速度で検出する
【解決手段】所定波長帯域光を波長に依存して放射角が異なるように分散させて、放射する照射装置と、照射装置により放射された光の対象物からの反射光を受光する受光装置と、受光装置による受光結果から対象物の方位を決定する方位決定装置とを有する。また、照射装置は、スーパーコンティニュアム光を放射する装置である。パルス光を放射する時刻から、反射光の受光時までの遅延時間を測定し、遅延時間から対象物までの距離を測定する距離測定装置を有する。これにより光の放射角を走査することなく、一度に、3次元空間における対象物の座標を測定することができる。
(もっと読む)
距離測定装置および距離測定方法
【課題】距離の測定にかかる時間を短縮すること。
【解決手段】本発明の距離測定装置は、光源10と、スプリッタ11と、観測面16と、参照光群生成手段17とを有している。光源10から放射された光は、スプリッタ11によって測定光と、第1参照光とに分割される。第1参照光は、光路長が互いに異なる複数の第2参照光に分割され、各第2参照光は、観測面16のそれぞれ異なる位置に到達する。したがって、観測面16上の位置と第2参照光の光路長が対応付けられる。また、測定光は、測定物13によって反射されたのち、観測面16に到達する。観測面16における干渉縞は、測定光の光路長と第2参照光の光路長が等しい場合に生じ、観測面16における干渉縞の位置は、第2参照光の光路長に対応しているので、干渉縞の位置から瞬時に測定物13までの距離を測定することができる。
(もっと読む)
ライダー装置及び対象物検出方法
【課題】
海上或いは非海上の対象物をより正確に把握することの可能なライダー装置及び対象物検出方法を提供すること。
【解決手段】
本発明に係るライダー装置1は、近・遠紫外パルスレーザー2を非スポット的に射出するレーザー射出部103と、前記レーザー射出部103からのレーザー2が対象物に照射されて返ってくる光を所定の波長幅ごとにフィルタリングするフィルタ107aと、前記フィルタ107aを通過した光を蛍光及び/又は水ラマン散乱光及び/又は弾性散乱光に分けてそれぞれを露光する受光機構106と、前記露光された蛍光及び/又は水ラマン散乱光及び/又は弾性散乱光をそれぞれの画像もしくは合成画像として表示する表示部101と、全体の機器制御を行う制御部101とを具備して構成される。
(もっと読む)
測距装置
【課題】背景光による測定誤差の少ない少数ロットのシステムを安価に組み立てられる測距装置を提供する。
【解決手段】発光ダイオード11から出力した検知光を測定対象A1に向かって射出し、検知光の反射光をレンズ13で収束してリニアセンサ14の検知面14aに収束スポットSPを形成させる。演算素子15は、リニアセンサ14からシリアルデータで出力される102個の受光素子18のそれぞれの受光量の数値データを用いて収束スポットSPの受光量ピークを識別して、測定対象A1までの距離を演算し、演算結果を出力端子OUT1〜OUT4を通じて4ビットのパラレルデータで出力する。
(もっと読む)
対物距離計測方法及び装置
本発明に係る方法は、計測対象物(20)までの距離(d)を計測する方法であり、発光器(12)からビーム光(18)を出射するステップと、計測対象物(20)で反射されたビーム光(24)を受光器(14)に入射するステップと、その出射(18)から入射(24)までのビーム光伝搬時間から距離(d)を求めるステップと、ビーム光(18)の出射に際し方形波変調信号(66,74)に従いそのビーム光(18)を振幅変調するステップと、を有する。使用する方形波変調信号(66,74)は、それぞれ複数個の方形パルス(68,68’)からなる複数個の方形パルス群(76,76’)を含む信号(66,74)である特に、本方法では、それら方形パルス群(76,76’)間の時間間隔(PA)を変動させると共に、それらの方形パルス群(76,76’)内の方形パルス(68,68’)の個数を変動させる。 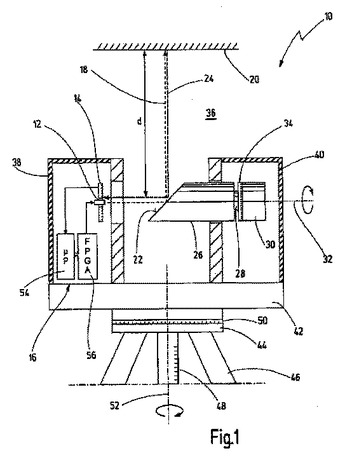 (もっと読む)
(もっと読む)
3次元形状測定器
【課題】レーザ光の照射位置における戻り光の正確な光量による計測が可能な形状測定装置を有する3次元形状測定器を提供すること。
【解決手段】レーザダイオード2と、第1光学系と、照射位置移動手段と、エンコーダ6aと、第2光学系と、CCDラインセンサ部13と、入射光量測定手段とを有し、検知手段から出力された検知信号により所定時間の間隔を有する複数のタイミング信号が生成され、タイミング信号によってCCDのリセットタイミングが制御されており、一のタイミング信号後に確認用レーザ光をレーザダイオード2から照射し、確認用レーザ光の光量を入射光量測定手段により測定し、入射光量測定手段により測定された確認用レーザ光の光量から測定用レーザ光の発光量が決定される。
(もっと読む)
改善された光学測距カメラ
【課題】一つの情景中の全ての画素から実質的に同時に深度情報を得る、改善された測距カメラを提供する。
【解決手段】情景中の被写体までの距離を示す画像を生成する装置であって、第1変調関数を有し、放射波を情景に向かわせる変調された放射波源と、検知変調器を含み、第2変調関数を有するとともに、検知アレイを有し、該アレイが複数の検知要素を含んでおり、情景内で複数の平行な間隔を有するセグメントから反射された放射を検知するとともに、上記検知された放射波に応じて、上記情景の領域までの距離に応答する信号を発生させる検知器と、間隔を有する複数のセグメントの少なくともいくつかを含むとともに上記装置から被写体までの距離を示す強度分布を有する画像を形成するプロセッサと、を含み、複数の間隔を有するセグメントの各々が上記装置に関して距離限界を有しており、該距離限界が上記検知変調器により決定され、複数の間隔を有するセグメントの少なくとも一つが少なくとも一つの他の間隔を有するセグメントの限界と異なる距離限界を有している。
(もっと読む)
物体を撮像する方法および物体を撮像するためのシステム
【課題】非縮退であって周波数エンタングルされた光子を用いて撮像を行なう。
【解決手段】少なくとも部分的に不明瞭であることが考えられる物体を撮像する。周波数エンタングルされた光子が生成される。これらの周波数エンタングルされた光子は、第1および第2の周波数を有する光子を含む。第1の周波数を有する光子は、遮蔽物を通過して物体を照らすことができる。物体により散乱した光子および第2の周波数を有する光子を用いて、到達時間の一致を考慮することにより、画像を形成する。
(もっと読む)
測距装置
【課題】目標物体周りの媒質の特性により計測された距離を補正することで目標物体までの距離を正確に測距可能な測距装置を提供すること。
【解決手段】目標物体に向け信号光を投射する送信光学系20と、前記目標物体で反射された前記信号光を受信する受信光学系30と、前記受信光学系における信号光の集光位置に配置された受光素子12と、前記目標物体までの媒質に応じた測距モードを選択するモード選択手段41と、選択された前記測距モードに対応する媒質の特性を用いて、前記信号光の送信時と受信時との時間差から前記目標物体までの距離を算出する制御装置100と、を有する測距装置150。
(もっと読む)
81 - 100 / 168
[ Back to top ]