
Fターム[5J084CA10]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 送信系に関するもの (1,298) | 変調方式、変調回路に関するもの (384) | パルス変調 (115)
Fターム[5J084CA10]に分類される特許
21 - 40 / 115
距離計測装置、距離計測方法、及びプログラム

【課題】簡易な構成で計測対象物までの距離を高精度に計測すること。
【解決手段】
距離計測装置1は、第1クロック信号に基づく第1PN符号信号に応じて計測対象物に対して光送信波を送出し、その反射波を受信し、その反射波と第1クロック信号の周波数に近い周波数の第2クロック信号に基づく第2PN符号信号と、を乗算して第1相関信号を生成し、第1PN符号信号と第2PN符号信号とを乗算して第2相関信号を生成し、第1及び第2相関信号の周波数帯を低下させた第1及び第2補正信号を生成し、第1及び第2補正信号に基づいて充放電を行う第1及び第2コンデンサの静電容量の比に基づいて、計測対象物までの距離を演算する。
(もっと読む)
光測距装置

【課題】バイアス電圧を印加することにより増倍作用を持つ受光素子を備えた光測距装置において、素子温度の変化に対して個々の受光素子の増倍率を精度良く一定に保持できるようにする。
【解決手段】光測距装置1は、2次元走査ミラー2、レーザ投光部3、アバランシェフォトダイオードAPDからなる受光素子4bを備えたレーザ受光部4、投受光分離器5を含んで構成される。また、レーザ光走査領域SAの下端に沿って走査領域SAに重なるように、短冊状の反射板21をカバーガラス7に取り付けてある。そして、反射板21からの反射光を受光したときの受光素子4bの出力が目標値(所定の設定値)になるように、受光素子4bに印加するバイアス電圧を変更する。
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
【課題】距離計、画像マッピング、三次元画像キャプチャ、及び人間の色感覚によって限定されない色感覚での画像のキャプチャを含み得る三次元応用例に適したCMOS実装可能な画像センサ、及び、そのような検出器の検出特性を改善する。
【解決手段】オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
【課題】距離計、画像マッピング、三次元画像キャプチャ、及び人間の色感覚によって限定されない色感覚での画像のキャプチャを含み得る三次元応用例に適したCMOS実装可能な画像センサ、及び、そのような検出器の検出特性を改善する。
【解決手段】オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。
(もっと読む)
レーザ距離測定装置
【課題】従来のレーザ距離測定装置では、測定性能や装置構造のさらなる改善が望まれていた。
【解決手段】送信レーザ光LTと目標で反射した受信レーザ光LRの時間的なずれに基づいて目標までの距離を測定するレーザ距離測定装置F1であって、送信レーザ光LTの発光部1と、受信レーザ光LRの受光部2と、垂直軸回りに回転駆動される回転体3を備えると共に、回転体3に、回転しながら発光部1からの送信レーザ光LTを外部の所定角度範囲に走査する送信光学系4と、回転しながら外部の所定角度範囲からの受信レーザ光LRを受光部2に導く受信光学系5を設けたことにより、一つの回転体3に、送信光学系4及び受信光学系5をコンパクトに搭載すると共に、全方位分の送信レーザ光LTを有効に使用するようにして、走査性能や測定性能のさらなる向上、及び装置構造のさらなる小型軽量化を実現した。
(もっと読む)
送受信信号相関検出装置及び距離測定装置
【課題】カットオフ周波数を適切に設定して、受信信号の2値化の際のコード認識率の低下を抑制して、高い相関値のピークを得る。
【解決手段】PNコード発生回路22で発生したPNコードに応じてレーザ光源26を駆動して光パルスを射出し、目標対象物で反射した反射光パルスをフォトダイオード32で受光して受信信号を出力する。バンドパスフィルタ34を通過した受信信号はマイナス方向へシフトされ、エンコーダ36で2値化され、信号処理部40で、相関値がピークとなるPNコードと受信信号との位相差に基づいて、目標対象物までの距離を算出する。バンドパスフィルタ34のローカットオフ周波数の下限を、受信信号が定常状態となるまでの時間が受信信号の1周期より小さくなる周波数とし、上限を、受信信号のピーク値からパルスひずみの相対量を減算した値が、エンコーダ36の閾値と雑音成分の信号レベルとの和より大きくなる周波数とする。
(もっと読む)
水中距離測定用レーザー送受信システム、レーザースティック及び水中における距離測定方法
【課題】地球上のダイナミックな海底の挙動を測定する水中距離測定用レーザー送受信システムと、レーザースティックと、水中における距離測定方法とを提供する。
【解決手段】少なくとも二以上の送受信装置10を海底に間隔をあけて設置する。一つの送受信装置10が、海水を介して他の送受信装置10に対してレーザー光を照射する送信手段11と、他の送受信装置10から照射されたレーザー光を受信する受信手段12と、送信手段11におけるレーザー光の送信方向、受信手段12におけるレーザー光の受信方向の何れか一方又は双方を制御する制御手段13と、送信手段11、受信手段12の何れか又は双方を用いて他の送受信装置10とレーザー光を送受信して他の送受信装置10との距離を測定する距離測定手段14と、距離測定手段14により収集したデータを格納するデータ格納手段15と、を備える。
(もっと読む)
時間計測装置およびセンサ装置
【課題】計測時間の計測精度の低下を抑制し得る時間計測装置およびセンサ装置を提供する。
【解決手段】レーザレーダ装置1に採用される制御回路70の時間計測回路71では、計測時間Tが、デジタル値D1およびデジタル値D2の比率と基準時間Toとに基づいて求められる。さらに、比率演算時の時間分解能Tr1が、比率演算時の演算誤差e1に等しくなるように設定されて、リング遅延パルス発生回路81の遅延素子(ゲートディレイ)の時間分解能よりも細かく設定される。
(もっと読む)
異物検出装置
【課題】ターゲットに照射して戻ってくる散乱光の偏波成分によらず異物の3次元形状を高精度に検出できる異物検出装置を得る。
【解決手段】連続波信号で変調されたレーザ光を出力する光源6と、レーザ光を用いてターゲットの捜索範囲を走査するスキャナ10と、ターゲット表面で散乱される散乱光を偏波成分ごとに分離する偏波ビームスプリッタ12と、散乱光の各偏波成分をそれぞれ受光する受信レンズ13a、13b、及び光受信機14a、14bで構成される受光手段と、レーザ光と散乱光の各偏波成分との位相差及び散乱光の各偏波成分の受信強度を検出する位相検波器15a、15bと、これらの検出結果に基づいて散乱光の偏波解消度を算出すると共に、偏波解消度の算出結果に応じて異物との離間距離を算出し異物の3次元形状を出力するパソコン3と、を備えたものである。
(もっと読む)
物体検出装置および情報取得装置
【課題】簡素な構成にて目標領域の情報を精度よく取得できる情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長830nm程度のレーザ光を出射するレーザ光源111と、レーザ光を前記目標領域に向けて投射する投射光学系10と、前記目標領域からの反射光を受光して信号を出力するCMOSイメージセンサ125とを有する。レーザ光が出射されたときにCMOSイメージセンサ125から出力される第1の撮像データから、レーザ光が出射されていないときにCMOSイメージセンサ125から出力される第2の撮像データが減算され、減算結果が、メモリ25に記憶される。3次元距離演算部21cは、メモリ25に記憶された減算結果に基づいて、3次元距離情報を演算し取得する。
(もっと読む)
センサー、その動作方法、及びセンサーを含むデータ処理システム
【課題】光信号の復調過程で発生する光電子の損失を補償して距離情報を正確に測定するセンサーの動作方法を提供する。
【解決手段】第1区間T1と第2区間T2とをそれぞれ有する複数のパケットP〜NPの各第1区間において、光源から出力された変調された光信号を復調するために、相異なる位相を有する複数のオシレーション信号Pa、Pbのそれぞれを複数のフォトゲートのそれぞれに供給する段階と、前記複数のパケットの各第2区間において、前記光源をディセーブルさせ、DC電圧を前記複数のフォトゲートのそれぞれに供給する段階と、を含む。
(もっと読む)
放射線透視装置
【課題】運動する被検査物の内部を簡単に透視できる放射線透視装置を提供することを目的とする。
【解決手段】放射線透視装置が、放射線照射部から離間した被検査物に放射線を照射して被検査物の内部を透視する放射線透視装置であって、被検査物の位置を検出する位置検出手段と、該位置検出手段が、検出した被検査物の位置に向けて放射線を照射するように放射線照射部を制御する制御手段とを具備する。
(もっと読む)
光走査装置、レーザレーダ装置、及び光走査方法
【課題】広角度の視野領域の全範囲において感度を一定に保持することができる光走査装置、レーザレーダ装置、及び光走査方法を提供する。
【解決手段】水平方向に対して予め定めた傾斜角度で交差するように配置された透明平板を通してレーザ光を走査する場合に、光源から射出されたレーザ光を水平方向に走査すると共に、光源から射出されたレーザ光の偏光面を透明平板の傾斜角度及び水平方向の方位角に応じて回転させて、偏向されたレーザ光を透明平板側に出力し、透明平板を通してレーザ光を走査する。
(もっと読む)
距離センサ及び距離画像センサ
【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1BK及び光入射面1BKとは逆側の表面1FTを有する半導体基板1A、フォトゲート電極PG、第1及び第2ゲート電極TX1,TX2、第1及び第2半導体領域FD1,FD2、並びに第3半導体領域SR1を備える。フォトゲート電極PGは、表面1FT上に設けられる。第1及び第2ゲート電極TX1,TX2は、フォトゲート電極PGに隣接して設けられる。第1及び第2半導体領域FD1,FD2は、各ゲート電極TX1,TX2の直下の領域に流れ込む電荷を蓄積する。第3半導体領域SR1は、第1及び第2半導体領域FD1,FD2から光入射面1BK側に離れて設けられ、第1及び第2半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
小さいフォームファクタの距離センサ
本明細書に開示する主題は、モバイルデバイスからリモートオブジェクトまでの距離、またはリモートオブジェクトのサイズを決定することに関する。
本発明は、回転可能なマイクロリフレクタを回転させてエネルギーをリモート表面に向ける段階であって、前記回転可能なマイクロリフレクタがモバイルデバイス中に配置され、前記回転させることが前記モバイルデバイスに関係する段階と、前記向けられたエネルギーの結果として生じる前記リモート表面からの反射エネルギーに少なくとも部分的に基づいて距離を測定する段階とを含む。 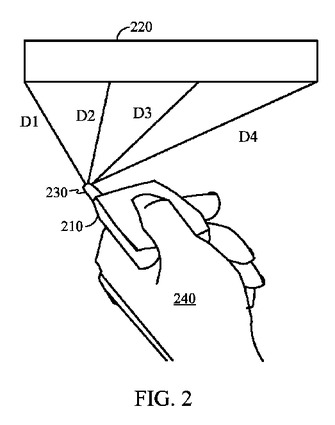 (もっと読む)
(もっと読む)
レーザ測距装置
【課題】小型化が容易であるとともに、測距対象物を見失った場合において、レーザ光の照射軸方向を迅速に変位し、効率よく測距対象物を捜索可能なレーザ測距装置を提供する。
【解決手段】測距対象物に照射したパルスレーザ光の反射光を受光した時間に基づいて測距対象物までの距離情報を取得するレーザ測距装置であって、Qスイッチ2を用いてパルスレーザ光を生成するレーザ共振器と、レーザ共振器により生成されたパルスレーザ光の進行方向を所定の方向に屈折させるQスイッチ5,6と、Qスイッチ2に高周波電力をパルス状に印加してパルス状のレーザ光を生じさせるとともに、Qスイッチ5,6の各々のオン/オフを制御するQスイッチドライバ7と、Qスイッチ2とQスイッチ5,6の各々とが同期するようにQスイッチドライバ7を制御することにより、レーザ共振器から出射されたパルスレーザ光の進行方向を1パルス毎に制御する制御部11とを備える。
(もっと読む)
SMIセンサを動作させる方法および対応のセンサ装置
本発明は、自己混合干渉センサを動作させる方法、および対応の自己混合干渉センサ装置に関するものである。この方法では、レーザーが周期的にレーザーパルスを発し、そのレーザーパルスの後に、そのレーザーパルスよりも低い振幅を有するレーザー放射の放射期間が後続するよう、装置のレーザー1が制御される。対象物3で反射された後のパルスが、低い振幅を有するレーザー放射の放射期間中においてレーザー1に再入射するよう、レーザーパルスのパルス幅が選択される。対応のSMI信号は、増強させられた信号対雑音比を有する。  (もっと読む)
(もっと読む)
空間情報検出装置
【課題】環境光や周囲光の影響を受けることなく物体までの距離が測定可能範囲外であるときに検出した空間情報を無効にすることで誤検出を防止する。
【解決手段】発光源1が対象空間に投光し、受光センサ2では規定の受光期間の電荷を集積し、さらに受光期間よりも長い蓄積期間に亘って蓄積した電荷を取り出す。発光源1の光出力は、2値の信号値の継続期間がそれぞれ単位期間の整数倍の期間となるように蓄積期間において乱数的に発生させた方形波信号で変調される。受光センサ2の受光期間は、変調信号に基づいて生成されたタイミング信号で規定される。距離演算部6は、タイミング信号に対応する電荷量を用いて物体までの距離を算出する。正誤判断部7は、2種類のタイミング信号を用いて得られる2種類の電荷量の差分を評価値に用い、評価値を用いて物体までの距離が測定可能範囲外と判断したときに空間情報を無効にする。
(もっと読む)
距離計測装置とその距離計測装置に用いられる受光装置
【課題】 対象物までの距離を正確に計測することができる距離測定装置、及びその距離測定装置で用いられる受光装置を提供する。
【解決手段】 距離計測装置10は、照射部4と受光装置50を備える。照射部4は、対象物30に向けて照射光20を照射する。受光装置50は、受光部60と演算部70を備える。受光部60は、対象物30で反射した反射光40を受光して電気信号に変換する。演算部70は、照射光20と反射光40に基づいて対象物30までの距離を演算する。演算部70は、計時器2と光量測定器12と距離データ計算器16を備える。計時器2は、照射された照射光20が対象物30で反射して受光部60に至るまでの時間を計測する。光量測定器12は、反射光40の光量を測定する。距離データ計算器16は、計時器2で計測された時間と光量測定器12で測定された光量を利用して、対象物30までの距離データを出力する。
(もっと読む)
画像センサとその画像センサに用いられる受光装置
【課題】 距離画像データと部位判別画像データの双方を取得可能な画像センサを提供すること。
【解決手段】 画像センサ100は、照射装置20と撮像装置40と演算装置60を備えている。照射装置20は、第1波長光を照射する第1光源22と、第2波長光を照射する第2光源を有する。演算装置60は、少なくとも第1波長光が照射装置20から対象物で反射して撮像装置40に到達するまでの距離に基づいて距離画像データを演算する。演算装置60はさらに、対象物における第1波長光の第1反射光の反射特性と対象物における第2波長光の第2反射光の反射特性の差に基づいて部位判別画像データを演算する。
(もっと読む)
21 - 40 / 115
[ Back to top ]