
Fターム[5J084CA10]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 送信系に関するもの (1,298) | 変調方式、変調回路に関するもの (384) | パルス変調 (115)
Fターム[5J084CA10]に分類される特許
81 - 100 / 115
測距装置
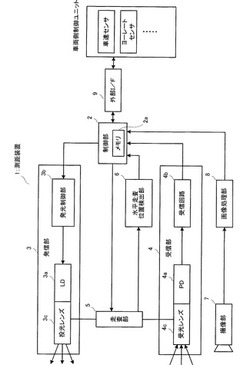
【課題】物体までの距離が短いか、長いかにかかわらず、当該物体までの距離の計測が精度よく行える測距装置を提供する。
【解決手段】測距装置1は、物体までの距離が長いときには、LD3aがレーザ光を発信してから、PD4aが反射光を受光するまでの経過時間を計測し、この経過時間に基づいてLD3aが発信したレーザ光を反射した物体までの距離を計測する。一方、物体までの距離が短いときには、画像処理部8から入力された、撮像画像における、撮像レンズの光軸位置と、LD3aから発信されたレーザ光の照射位置と、の相対的な位置関係から、物体までの距離を算出する。
(もっと読む)
レーザレーダ装置

【課題】音響光学素子からなる光変調部を用いたコヒーレントレーザレーダ装置では、単純な構成で十分なON/OFF消光比と時間変動のない安定した偏光状態の変調光を出力する光変調部を得ることが困難であった。
【解決手段】レーザレーダ装置に使用される光変調部3は、入出力光分離手段31と、音響光学素子324からなる光変調手段32と、基準光源1の出力レーザ光に対しほぼ全反射となる光全反射手段33とからなり、光変調手段は入出力光分離手段からの入力光と光全反射手段からの反射光が通過して2回変調されるように構成され、光全反射手段は出射光の偏光面が入射光の偏光面に対し直交回転している偏光面回転機能を有するようにして、十分なON/OFF消光比と時間変動のない安定した偏光状態の変調光が得られるようにした。
(もっと読む)
反射性対象に対する距離を求めるための方法及び装置
【課題】 温度及び外部光の影響が著しい場合であっても、距離ゼロからの距離測定が可能な、反射性対象に対する距離を求める方法及び装置の提供。
【解決手段】 送信信号の少なくとも1つの部分区間にわたって積分された送信信号(2.2)の結果としての電気的信号(2.5)が、夫々、少なくとも1つの時間的に隣接し少なくとも1つの部分区間にわたって積分された基準信号(2.1、2.3)の結果としての電気的基準信号と比較されること、比較器(1.19)の出力端(1.19c)に、送信信号(2.2)の及び/又は基準信号(2.1、2.3)の振幅値を調整するための制御値(1.29)が生成され、該制御値によって電気的信号(2.5)の振幅と電気的基準信号(2.4、2.6)の振幅は少なくとも比較器(1.19)の入力端(1.19a、1.19b)において実質的に同じ大きさであること、このように調整された状態において、クロック変化の際に生成し送信光源(1.8)から対象(1.26)及び受信器(1.10)への光伝搬時間に対応するクロック変化信号の振幅が、電気的信号(2.5)と電気的基準信号(2.4、2.6)の間及び/又は電気的基準信号(2.4、2.6)と電気的信号(2.5)の間で検出されること、及び更なる比較器(1.16)において、クロック変化信号(複数)の振幅(複数)が互いに対し比較されて又はクロック変化信号の振幅が当該光伝搬時間に依存しない振幅値と比較されて差値(1.27)として求められ、該差値が制御ユニット(1.2)によって消去ないし少なくとも最小にされることを特徴とする。
(もっと読む)
シーン(情景)の3D画像を捕捉する方法及びシステム
シーンの3D画像を捕捉するため、シーンは光供給装置の放出する被変調光で照射され、ロックイン画素センサセルのアレイに画像表示される。ロックイン画素センサセルは放出された光を、それがシーン内の物体又は生物により散乱又は反射された後、検出する。ロックイン画素センサで検出された光の変調位相が特定され、発光時の光の変調位相と既知の関係にある基準変調位相が用意される。基準変調位相と、ロックイン画素センサセルで検出された光の変調位相に基づいて、シーンに関する深さ情報が計算される。被変調光は光供給装置の、各々が被変調光の一部を放出するようにした個別発光素子複数により放出され、基準変調位相は発光素子の放出する被変調光の部分の変調位相の平均値として用意される。  (もっと読む)
(もっと読む)
走査式測距装置
【課題】簡単な構成の基準機構を走査部に設けることにより、安価で且つ高精度な測距を実現し得る走査式測距装置を提供する。
【解決手段】測定光を出力する投光部3と、前記測定光を測定対象空間に向けて走査する走査部4と、前記測定対象空間に存在する測定対象物からの反射光を検出する受光部5を備え、前記反射光に基づいて前記測定対象物までの距離を測定する走査式測距装置であって、前記走査部4は、前記測定光を前記測定対象空間に伝播させ且つ前記反射光を前記受光部5に導く反射部材9と、前記反射部材9を所定回転軸心で回転させる回転機構を備え、前記回転軸心と前記測定光の光軸とが平行となるように前記投光部3と前記走査部4が配置され、前記走査部4の特定回転位置で前記測定光の一部が基準光として前記受光部5に導かれるように構成される。
(もっと読む)
レーダ装置および距離測定方法
【課題】高速の回路を使用することなく、目標物までの距離を高精度に測定する。
【解決手段】送信信号生成部1は、略非周期性の疑似ランダム信号である送信信号を生成する。電磁波を送信信号で変調した送信波を送信部2から放射し、受信部3で反射波を受信する。位相限定相関演算部5は、送信信号と受信信号に1次元離散的フーリエ変換を施す第1のフーリエ変換部と、フーリエ送信信号とフーリエ受信信号を合成する合成処理部と、合成フーリエ信号の振幅を抑制する振幅抑制処理部と、振幅抑制処理後の合成フーリエ信号に1次元離散的フーリエ変換又は1次元離散的逆フーリエ変換を施す第2のフーリエ変換部と、相関信号のピーク位置に基づいて遅延時間を求める遅延時間検出部と、遅延時間を基に物体までの距離を算出する距離算出部とを備える。
(もっと読む)
測距装置
【課題】高精度に目標との距離を得ることができる測距装置を提供する。
【解決手段】光を受光し、光の強さに応じたレベルの信号を出力する受光手段と、受光手段に対し直接発光する第1の発光手段と、受光手段が目標からの反射光を受光可能なように、目標に対し発光する第2の発光手段と、受光手段が受光したタイミングを、受光手段が出力した信号に基づいて取得すると共に、第1の発光手段及び第2の発光手段の発光の開始及び停止の制御を行う制御手段と、を有し、制御手段は、第1の発光手段を所定時間発光させることにより受光手段が受光した第1のタイミングを取得し、第1の発光手段の発光を停止させた後に第2の発光手段を発光させることによる反射光を受光手段が受光した第2のタイミングを取得し、第1のタイミング、第2のタイミング及び所定時間に基づいて目標との距離を算出する。
(もっと読む)
電子光学距離計
本発明は、レーザ源としての台形のレーザ(1)と、パルスレーザ放射線を発生させるレーザ源コントローラ(6)、標的(ZI)によって反射された前記測定放射線(RS)を受光すると共に評価する評価ユニット(9)を有する検出器(8)、及び、受光システム(7)と、を備えた距離測定の用に供される電子光学距離計(4)に関する。この電子光学距離計(4)は、ガイドされた導波管(2)、及び、台形領域(3)に対する別々の供給部、及び、レーザ放射線を視準に合わせ、かつ、非点収差を補正する透過光学システム(5)を備えている。  (もっと読む)
(もっと読む)
改善された光学測距カメラ
【課題】一つの情景中の全ての画素から実質的に同時に深度情報を得る、改善された測距カメラを提供する。
【解決手段】別に得られた背景画像に重畳された目的の被写体を含む混合画像を生成するための方法であって、目的の被写体を含む情景の、該情景中の被写体までの距離を示す第1画像を形成すること、上記第1画像により示された、上記被写体までの距離を決定すること、少なくとも一つの被写体までの距離を含む距離領域を規定すること、フィルタされた画像を形成するために上記距離領域の外側にある被写体を第1画像から除去すること、上記フィルタされた画像を上記背景画像の上に重畳すること、を含む。
(もっと読む)
改善された光学測距カメラ
【課題】一つの情景中の全ての画素から実質的に同時に深度情報を得る、改善された測距カメラを提供する。
【解決手段】情景中の被写体までの距離を示す画像を生成するための装置であって、第1変調関数を有し、情景に向かって放射波を向きづける変調された放射波源と、上記情景から反射され、第2変調関数により変調された放射波を検知し、上記検知され変調された放射波に応じて、上記情景の領域までの距離に対応する信号を発生する第1検知器と、上記情景から反射され、上記第2変調関数により変調されない放射波を検知するとともに、上記検知された放射波に応じて上記情景の領域から反射された光の強度に応じた信号を発生する、上記第1検知器とボアサイトされた第2検知器と、上記第1および第2検知器から信号を受信するとともに、上記装置からの被写体の距離を示す強度分布を有する、上記信号に基づいて画像を形成するプロセッサと、を含む。
(もっと読む)
移動時間原理による光電式非接触距離測定の方法および装置
本発明は、伝搬時間原理に従って非接触様式で距離を光電式に測定する方法において、センサユニットからの物体の距離が、開始信号と、物体によって反射された光測定パルスから得られるエコー信号との時間差から求められる方法に関する。時間差を求めるために、次の、a)開始信号およびエコー信号をデジタルクロックと比較することにより、デジタル未処理値が得られるステップと、b)開始信号とデジタル未処理信号の始まりとの初期時間差、およびエコー信号とデジタル未処理信号の終わりとの最終時間差が、少なくとも2つの細密補間回路を用いて求められるステップと、c)アナログ信号に対応する初期差または最終時間差が、細密補間回路に導入されて、デジタル初期時間差またはデジタル最終時間差に変換されるステップとが実施される。前記方法は、細密補間回路を自動的に較正するために、ステップa)〜c)に従って複数回の測定が実施され、また特定の値間隔内で初期時間差および最終時間差について値が測定される可能性に対して均一な分布であると考えることによって、細密補間回路の特性線の非直線性および/またはドリフトの補正が計算されることを特徴とする。本発明は、伝搬時間原理に従って非接触様式で距離を光電式に測定するための装置にも関する。  (もっと読む)
(もっと読む)
レーザ光照射測定装置
【課題】
照射レーザ光のみをガルバノミラーによって走査し反射光をそのまま受光器で受光する装置の場合でも、レーザ光の強度制御において制御に遅れが発生せず、又は外乱光の影響を受けにくく、測定精度の高いレーザ光照射測定装置を提供することにある。
【解決手段】
受光器の受光面から反射する受光面反射光を集光する集光レンズと、集光レンズにより集光された受光面反射光の受光量を検出するフォトセンサと、フォトセンサによって検出された受光量に応じてレーザ光照射器から対象物に照射されるレーザ光の光量を補正するレーザ光量補正手段とを備えることを特徴とする。
(もっと読む)
物体反射型センサ装置およびこれを具備した照明装置
【課題】物体検出精度が高く、物体誤検出に基づく誤動作を防止または低減することができる物体反射型センサ装置およびこれを具備した照明装置を提供する。
【解決手段】赤外線を発光する発光器2と;この発光器で周期的に発光する赤外線の発光時間デューティ比を周期毎に制御して複数周期で所要の発光パターンを形成する発光信号パルス幅制御手段3と;赤外線を受光する受光器5と;この受光器で受光した赤外線の上記複数周期での発光パターンが発光信号パルス幅制御手段により形成された発光パターンと一致するか否かを判定し、その発光パターンが一致したときに、物体検出信号を出力する受光信号パルス幅判定手段11と;この受光信号パルス幅判定手段から物体検出信号を受けたときに、負荷の駆動を制御する制御信号を出力する出力手段12と;を具備している。
(もっと読む)
波形観測方法と波形観測装置
【課題】同期検波用遅延器を使用せずに測定対象からの反射波を観測することのできる波形観測装置を提供する。
【解決手段】進行波を所定の周期で繰り返し送出する送信器102と、測定対象Mで反射する反射波を受波する受信器103と、反射波の振幅値をその反射波を受波する毎に記憶していく反射波形観測手段104とを移動体に設けた波形観測装置であって、前記移動体と測定対象Mとの相対速度を検出する相対速度検出手段106と、測定対象Mと受信器103との間の伝播経路の経路変化量を、前記相対速度度に基づいて受信器103が反射波を受波する毎に算出する経路変化量算出手段107と、この経路変化量算出手段107が算出する経路変化量に基づいて、前記反射波のサンプリング点間隔を算出するサンプリング周期算出手段108とを備え、このサンプリング周期算出手段108が算出したサンプリング点間隔と、このサンプリング点間隔に対応する前記振幅値とから反射波の波形を観測する。
(もっと読む)
光学式測距装置
【課題】背景光が強い環境下であり信号光量が微小な場合でも精度の高い測距を行う。
【解決手段】スイッチ21a,21bに、タイミング回路14から第1,第3開閉信号が入力されると、各奇数番目の蓄積部22a,22bに2つの受光部20a,20bからの受光信号の電荷が蓄積される一方、第2,第4開閉信号が入力されると、各偶数番目の蓄積部22a,22bに2つの受光部20a,20bからの受光信号の電荷が蓄積される。差動演算部23a,23bは、奇数番目の蓄積部22a,22bからの信号と偶数番目の蓄積部22a,22bからの信号との差動演算を行う。こうして、背景光等のノイズ成分を適宜除去して距離計算に必要な信号成分のみを抽出する。その際に、1つの蓄積部22a,22bに2つの受光部20a,20bからの受光信号の電荷を蓄積して、各差動演算部23a,23bによる上記差動演算の精度を高くする。
(もっと読む)
光学式反射型センサ用受光回路
【課題】本発明は、光学式反射型センサの小型化、低消費電力化及び低コスト化を可能にする光学式反射型センサ用受光回路を提供することにある。
【解決手段】FET1のドレイン(D)を直流電源(図示せず)の+側(Vcc)に接続し、ソース(S)を受光素子2のカソードに接続し、受光素子2のアノードを直流電源の−側(GND)に接続する。そして、FET1のソース(S)と受光素子2のカソードとの接続部を容量素子3の一方の電極とヒステリシス特性を有するインバータ4の入力端子に接続し、容量素子3の他方の電極をGNDに接続し、インバータ4の出力端子は外部に対する出力信号の供給端子となっている。
(もっと読む)
固体撮像素子を用いた三次元画像取得方法
【課題】従来より知られた固体撮像素子を用いてコスト高を招来することなく、十分に実用になる三次元画像を取得する。
【解決手段】画素が所定の方向と上記所定の方向とは直交する方向とに沿って2次元マトリクス状に配置された固体撮像素子により、被写体に照射された光の上記被写体からの反射光を受光して上記被写体の三次元画像を取得する固体撮像素子を用いた三次元画像取得方法において、被写体に対して第1の所定時間間隔でパルス状に光を照射し、上記被写体からの反射光を所定の方向に沿った画素群毎に、上記所定の方向とは直交する方向に沿って第2の所定時間間隔を開けて順次に受光してストライプ状の三次元画像を取得する。
(もっと読む)
光波距離計
【課題】変調信号を変更することなく、高精度化を図ること。
【解決手段】発光素子10Aから変調信号F1、F2、F3で変調された測距光が発光され、その反射光が受光素子18で受光されると、受光素子18からは測距信号f1、f2、f3とともに、測距信号f1×nが出力され、各測距信号が混合器20〜26でローカル信号L1×n、L1、L2、L3と混合されると、各混合器20〜26から中間周波数の測距信号(IF信号)Δfが出力され、演算器36で各測距信号と参照信号Δfとが比較され、両者の位相差を基に測点までの距離が演算される。このとき、測距信号f1、f2、f3から測距信号(IF信号)を生成する他に、測距信号f1の高調波成分である測距信号f1×nから測距信号(IF信号)を生成しているので、変調信号を変更することなく、計測情報の増加に伴って高精度化を図ることが可能になる。
(もっと読む)
レーザ距離測定方法
【課題】従来のレーザ距離測定にあっては、測定の高精度化と高速化の両立を図ることが困難であった。
【解決手段】送信レーザ光LTのパルス信号を所定周期で変化させてこれを低周波周期信号とし、目標Tに照射した送信レーザ光LTの低周波周期信号と目標Tで反射した受信レーザ光LRの低周波周期信号に基いて概略的な一次距離データを得ると共に、送信レーザ光LTのパルス信号と受信レーザ光LRのパルス信号に基いて詳細な二次距離データを得た後、一次距離データと二次距離データを合成して目標Tまでの距離を算出するレーザ距離測定方法とし、測定の高精度化及び高速化の両方を実現し得るものとした。
(もっと読む)
一体型レーザ/赤外線前方監視光学装置
【課題】FLIR/レーザーに基づく目標化および撮像システムにおいて、IRのLOSとレーザーのLOSとの固定された整合誤差およびダイナミック整合誤差を低減することにより、当該エリア内の目標を認識する能力を大幅に改善する。
【解決手段】IRのLOSとレーザーのLOSの間の固定された整合誤差は、改善された内部ボアサイトモジュール(図10)および対応するボアサイト方法により低減される。ダイナミック整合誤差はレーザーエネルギーおよびIRエネルギーの双方に対する単一ピッチ(405)ベアリングおよび共通ピッチ/ヨーアフォーカル(401)を使用する光電気サブシステムによって低減される。
(もっと読む)
81 - 100 / 115
[ Back to top ]