
Fターム[5J084CA31]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | コンピュータ処理 (337)
Fターム[5J084CA31]に分類される特許
161 - 180 / 337
物体認識装置
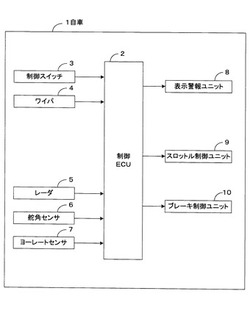
【課題】レーダのスキャン結果からの頭上看板等の誤検出を精度よく判定する。
【解決手段】制御ECU2により、先行車を検出している状態でレーダ5の反射ビームから先行車より前方に検出した静止物体を頭上看板等の誤検出物体と判定し、静止した車両等を頭上看板等と誤って判定することなく、頭上看板等の誤検出を精度良く判定する。
(もっと読む)
ビーム照射装置およびレーザレーダ

【課題】目標領域に対するレーザ光の照射精度を高く維持しながら、制御回路の処理負担を軽減できるビーム照射装置およびレーザレーダを提供する。
【解決手段】スキャン制御部1aは、Tilt方向におけるミラー制御の半分の頻度で、Pan方向におけるミラー制御を行う。また、スキャン制御部1aは、PSD308上に設定された目標軌道上のQn、Qn+1、…に対応する位置にサーボ用レーザ光の実測位置が到達したことに応じて、レーザ光源401をパルス状に発光させる。これにより、走査用レーザ光は、サーボ用レーザ光の実測位置がQn’、Qn+1’、…に到達したタイミングで、目標領域に照射される。こうすると、Pan方向におけるミラー制御をラフに行いながら、略一定振り角毎に、走査用レーザ光を目標領域に照射できる。
(もっと読む)
レーザードップラー速度計
【課題】被検体の速度を安定して精度良く測定するレーザードップラー速度計を提供する。
【解決手段】レーザードップラー速度計100は、被検体Dの表面で干渉及び反射された散乱光を受光する複数の受光素子120を含む光学センサ110と信号処理ユニット130とを有し、信号処理ユニット130は、複数の受光素子120の出力のうち信号レベルが許容値以上であるかどうかを判断することによってその一つ選択するための選択信号を生成するCPU138と、選択信号に基づいて信号S1を信号S2に切り替える選択切換部146と、信号S1と信号S2の位相差に対応する時間差だけ信号S2の立ち上がり及び立ち下がりを遅延させて信号S1と重ねることによってパルス信号を生成する差分遅延処理部148と、を有する。
(もっと読む)
距離画像処理装置および撮影装置
【課題】距離画像内で、位置を限定することなく、所望の抽出条件に適合する対象物を特定、抽出する。
【解決手段】距離画像内で、距離値を用いて検出対象となる対象物の候補を抽出する。距離画像内で、近接する距離値が所定以上連続する画素群を対象物候補として抽出する。抽出した対象物候補は、さらにパターンマッチング、速度制限などを用い、絞り込む。得られた対象物候補の中から抽出条件に適合するものを対象物として抽出する。また、抽出条件として、先に抽出したものと同じものを抽出するよう構成してもよい。
(もっと読む)
距離計測装置及び距離計測方法
【課題】距離や反射率の異なる物体の距離を高い精度で計測する。
【解決手段】
次数の異なる照射角度の関数で表現される2種類の照度パタンの照射光を第1ライト21及び第2ライト22に照射させる照射制御機能と、カメラシステム30に各照射光の反射光の撮像データを取得させる撮像制御機能と、得られた各撮像データから種類の輝度パタンを取得させる輝度パタン取得機能と、この2種類の輝度パタンから各画素の指標値を算出する指標値算出機能と、指標値の連続性に基づいて観測領域を識別する観測領域識別機能と、各観測領域の指標値に基づいて、その観測領域を照射する照射光の照射角度を算出する照射角算出機能と、算出された照射角度と、観測領域の撮像角度と、第1ライト21及び第2ライト22とカメラシステム30との位置関係に基づいて、物体までの距離を算出する距離算出機能を実現させる制御装置10を備える。
(もっと読む)
ゲート3Dカメラ
場面までの距離を判定するカメラ。このカメラは、特性スペクトルを有する光のパルス列で場面を照明するように制御可能なVCSELと、感光面と、場面によって光パルスから反射された光を感光面上に撮像する光学素子と、スペクトルにおける光に対して、感光面を選択的にオンおよびオフにゲートするように動作可能なシャッターとを備えている。 (もっと読む)
センサ校正装置、及び、センサ校正方法
【課題】距離画像センサ等の測距センサを適正に且つ簡便に校正する。
【解決手段】センサ校正ECU1は、車両VCの状態及びVC車両が位置している路面SRの状態の少なくとも一方に基づいて、距離画像センサ2が校正可能状態であるか否かを判定する校正可否判定部12、及び、校正可否判定部12によって校正可能状態であると判定された場合に、距離画像センサ2と該車両VCが位置している路面SRとの予め求められた距離(=基準距離)に基づいて、距離画像センサ2を校正する校正実行部13、を備える。
(もっと読む)
人体存在検知装置及び人体存在検知方法
【課題】低コストで実現可能であると共に、人体が存在するか否かの検知を、操作者である人体が操作する電子機器等の制御に適合しやすい人体存在検知装置を、提供する。
【解決手段】基準位置から一定距離内に、人体が存在するか否かの判断を行う機能を備えた人体存在検知装置1を、基準位置から一定方向に存在する人体または物の存在位置に対する基準位置からの離間距離を一定時間経過毎に測定する離間距離測定手段2、該測定された離間距離に基づき一定距離内外判定結果と動静判定結果とを形成する判定結果形成手段3、該一定距離内外判定結果と、該動静判定結果とで構成される検知状態情報を形成する検知状態情報形成手段4、該検知状態情報に基づき状態遷移パターンを形成する状態遷移パターン形成手段5、及び、該状態遷移パターンに基づき、基準位置から一定距離内に、人体が存在するか否かを判断する判断手段6で構成する。
(もっと読む)
光波レーダ装置
【課題】本発明は、望遠鏡の交換をすることなく、視線方向への計測可能範囲を比較的広くすることができるとともに、計測作業の円滑化を図ることができる光波レーダ装置を提供する。
【解決手段】第1及び第2コリメータ光学系106A,106Bは、第1及び第2送信光A4,A5のそれぞれを略平行化する。また、第1及び第2コリメータ光学系106A,106Bは、第1及び第2送信光A4,A5のそれぞれのビーム径及び集光距離を調整可能となっている。第1コリメータ光学系106A及び第2コリメータ光学系106Bを経た第1送信光A4及び第2送信光A5は、偏光合成分離手段108によって、互いの直交偏光成分が合成される。直交2偏光の送信光は、送受信同軸の望遠鏡109によって、大気中の所望の目標へ向けて照射される。
(もっと読む)
距離計測装置及びプログラム
【課題】対象物の3次元位置を精度よく計測することができるようにする。
【解決手段】第1撮像部20及び第2撮像部22によって、撮像対象物を各々異なる位置から撮像して、複数の撮像画像データを出力し、3次元距離算出部24によって、出力された複数の撮像画像データに基づいて、撮像対象物を表わす領域内の各画素に対応する3次元位置までの距離を算出して距離画像を生成する。レーザレーダ14によって、レーザの走査方向に並んだ各2次元位置までの距離を計測する。座標変換部32によって、レーザレーダ14によって距離が計測された2次元位置を、距離画像の画素座標に変換する。補正領域抽出部34によって、変換された画素座標に基づいて、位置距離画像から補正対象領域を抽出し、3次元距離補正部36によって、補正対象領域内の各画素に対応する3次元位置までの距離を、レーザレーダ14によって計測された距離に補正する。
(もっと読む)
三次元及び距離の面間推定を与えるための方法及びシステム
本発明は、シーン内の1又は複数の被写体の3−A(三次元の)被写体外形の面間推定及び/又は距離の面間推定を行うシステム、装置及び方法に関する。方法は、(a)特徴タイプを生じさせる、各特徴タイプが固有の二次元構造により識別可能である所定の明確な特徴タイプの有限セットを準備すること、(b)特徴タイプの多数の外観を含む符号化光パターンを準備すること、(c)軸方向に変化する強度を有する符号化光パターンを、第1の面を生じさせまた第2の面を生じさせる少なくとも2つの面を有するシーン内の1又は複数の被写体に投射すること、(d)被写体に投射された投射符号化光パターンを有する被写体の2−D(二次元の)画像を捕捉し、これにより、反射された特徴タイプを含む、捕捉された2−D画像を生じさせること、(e)2−D捕捉画像の強度値を決定し、決定された強度値を生じさせること、及び(f)決定された強度値に基づいてシーン内の1又は複数の被写体の3−D被写体外形面間推定及び/又は距離の面間推定を行うことを含む。 (もっと読む)
反射型光電センサおよび物体検出方法
【課題】誤判定の可能性を低減し、物体を安定的に検出する。
【解決手段】反射型光電センサは、光を放射する投光器1と、投光器1から放射された光の戻り光を受光する受光器2と、戻り光に基づいて投光器1の光放射方向に物体が存在するか否かを判定する判定部3と、投光器1から放射される光の光路上の位置で、かつ物体が出現すると想定される所よりも遠方の位置に配置されたモスアイ構造の反射防止板5とを備える。
(もっと読む)
車両用距離画像データ生成装置及び方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供すること。
【解決手段】 投光器5と、反射光を撮像するイメージインテンシファイア7b及び高速度カメラ8と、撮像タイミングを制御するタイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、低視程要因の距離画像データへの影響を抑制するステップS3,S4の処理を備えた。
(もっと読む)
物体検出装置
【課題】複数の物体が近接している場合であっても各物体を精度良く検出することができる物体検出装置を提供する。
【解決手段】歩行者検出装置1は、レーザレーダ2、カメラ3、運転支援ECU4及び制動部5を備える。歩行者検出装置1は、第1の歩行者候補点群L1に対し、第1の歩行者候補点群L1の分布幅より小さい幅を有する第1の検出領域Tを設定し、第1の検出領域T内に位置する検出点P1〜P3を抽出することにより、歩行者M1の検出を行う。第1の検出領域T内に位置しない検出点P4〜P9は、第2、第3の歩行者候補点群L2,L3として順次抽出され、第1の歩行者候補点群L1と同様な処理が行われる。これにより、複数の歩行者が近接している場合であっても各歩行者を精度良く検出できる。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】位置検出信号に対するレーザ光(外乱光)の影響を抑制し、位置検出精度を高めることができるビーム照射装置およびレーザレーダを提供する。
【解決手段】PSD308からの出力信号に基づいてサーボ光の受光位置に応じた信号を生成するPSD信号処理回路3と、PSD信号処理回路308からの信号に基づいてレーザ光の走査位置を検出するDSP8を備える。DSP8は、レーザ光の発光期間以外の期間(位置検出期間)においてレーザ光の走査位置の検出を行う。
(もっと読む)
光スキャン装置
【課題】指示した動きと実際の動きとの差を小さくして高精度な光走査を行うことができる光スキャン装置を提供すること。
【解決手段】レーザダイオードから出射されるレーザ光の方向をレンズが搭載された可動部を移動させることによって変化させる光スキャン装置において、レーザ光の走査を行うための往路の期間801で発生させる加速度の大きさよりも、レンズの位置を戻すための復路の期間802で発生させる加速度の大きさを大きくする。
(もっと読む)
物体検出装置
【課題】処理負荷を抑えながら、高精度に線模様を検出する物体検出装置を提供する。
【解決手段】処理部12は、処理部22で白線を検出した場合に、当該白線の画像特徴量(彩度、色相)を算出する。さらに、処理部12は、画像全体において、算出した白線の画像特徴量に一致する画像特徴量を有する位置を検出する。そして、レーザレーダ装置2の処理部22で検出した白線の位置における画像とカメラで抽出した遠方の白線の画像とを合成する。
(もっと読む)
船舶の航路上の物体の検知と画像化のシステム
高速船舶及び他の船舶の航路内の物体(16)の検知と画像化及び、航海安全にリスクとなる物体の警告システムであって、船舶は航行及び通信システム(28)を備え、物体のレーザ照明用の走査ユニット(10)、制御ユニット(11)、オペレータパネル(12)を有する。走査ユニットは、システムの視野の内にレーザビーム(33)を放出するように調整された目に安全な赤外レーザの光源(30)と、レーザビームの出力パワーの監視と、物体までの距離の測定用のトリガパルスの生成と、反射放射エネルギーを受信/検知し、物体との距離を放射光と反射光の時間差に基づいて計測し、パルスエネルギーとピーク効果を計測し、第1(19)と第2(20)の走査機構により、レーザビームと光学検知器(38)の瞬時の視野を問題の走査領域に亘って走査し、船舶に対する瞬時の放射方向に関する方向情報を獲得する。 (もっと読む)
路面監視装置,サスペンション制御装置
【課題】車両の姿勢に関わらず路面状況を正確に検出可能な監視装置、及びその監視結果を利用するサスペンション制御装置を提供する。
【解決手段】レーザー光で路面をスキャンした測定結果から、レーザー光を反射した地点をセンサ座標で表した検出位置情報(XL,YL,ZL)を生成し、各種センサの検出結果から車両の移動距離D,路面傾斜角θx,θyを算出する(S110〜S140)。これら算出結果から、車両の移動距離,移動方向を表す移動ベクトル(ΔX,ΔY,ΔZ)を求めると共に、検出位置情報を、車両基準座標の原点からの相対的な位置関係を示す相対位置ベクトル(XP,YP,ZP)に変換し、これら移動ベクトル及び相対位置ベクトルを、前回の監視タイミングにおける車両基準座標系の原点を絶対座標系で表した位置(Xr,Yr,Zr)に加算することで、レーザー光の反射地点の位置を絶対座標系で示した反射地点情報(X,Y,Z)を算出する(S150〜S170)。
(もっと読む)
光測距装置
【課題】測定値のばらつきによる影響を抑制し、測定精度を高めることが可能な光測距装置を提供する。
【解決手段】障害物センサ31は、2つの異なる周波数の変調光を交互に出射するように投光素子36を制御する出力制御部41と、受光素子37において受光された変調光に基づいて被投射体Tまでの測定距離を演算する距離演算部42と、2回の第1周波数の変調光によって演算された測定距離の差が、第1所定範囲内にあるかを判定する第1判定部43と、2回の第2周波数の変調光によって演算された測定距離の差が、第2所定範囲内にあるかを判定する第2判定部44と、第1判定部43と第2判定部44との判定結果に基づいて距離演算部42によって演算された測定距離の正誤を判定する総合判定部46とを備えている。
(もっと読む)
161 - 180 / 337
[ Back to top ]