
Fターム[5J084CA31]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | コンピュータ処理 (337)
Fターム[5J084CA31]に分類される特許
321 - 337 / 337
風速・風向測定システム

【課題】 測定範囲内における風速・風向を、効率よく、容易かつ簡単に測定することができる風速・風向測定システムを提供すること。
【解決手段】 レーザ光を測定箇所に出射する出射部と、その測定箇所で散乱された戻レーザ光を受光する受光部と、この出射部と受光部を駆動制御する制御部30と、を備えて、その制御部のCPU31は、測定箇所を細かく変動させて近傍3箇所における風速測定を行うことにより、その測定箇所における風速・風向を測定するとともに、その測定箇所を3次元的に変化させる。
(もっと読む)
風速測定システムおよび風速測定方法

【課題】 ドップラーシフトにより変化したレーザ光の周波数を簡易に導くことを実現して、測定箇所における風速や風向を容易かつ簡単に測定可能な風速測定システムを提供すること。
【解決手段】 出射レーザ光L1を出射するレーザ光生成器11と、出射レーザ光L1の戻レーザ光L2を分光するハーフミラー24と、ハーフミラーを透過する第1分光戻レーザ光L21の光強度を測定する第1光強度測定器27と、ハーフミラーにより反射された第2分光戻レーザ光L22をその周波数に応じて減衰させる光フィルタ26と、光フィルタにより減衰された第2分光戻レーザ光L22の光強度を測定する第2光強度測定器28と、光フィルタによる光強度の減衰量から戻レーザ光の周波数を算出して出射レーザ光の周波数と共に代入することにより測定箇所における風速・風向を算出する制御部と、を備える。
(もっと読む)
レーザ出力の周波数変調を用いて速度を測定するためのシステム及び方法
本発明は速度を測定するためのシステムに関する。本発明の一態様において、システムは、レーザ発光装置(230)と、光学素子アセンブリ(240)と、結合器(230)と、信号プロセッサ(270)とを備える。レーザ発光装置(230)は、周波数変調されたレーザ信号を発生する。光学素子アセンブリ(240)は、周波数変調された信号を、複数のレーザ信号に分割し、分割された信号をターゲット(250)に向け、ターゲット(250)から反射された少なくとも1つの信号を受信する。結合器(230)は、1つの信号経路を介して送信された分割信号の1つと、もう1つの信号経路を介して送信された少なくとも1つの反射された信号とを受信し、それら受信信号を乗算する。信号プロセッサ(270)は、乗算された信号から速度情報を抽出する。  (もっと読む)
(もっと読む)
測距装置
【課題】 視準光学系の倍率を変更した場合でも、レーザ光が照射される範囲を観察者が正しく認識することができる測距装置を提供する。
【解決手段】 目標物体を視準するための視準光学系の透過型液晶表示パネル7に表示される視準領域22の大きさを倍率に応じて変える。視準領域22の大きさのパターンを複数用意し、倍率に応じて選択し、透過型液晶表示パネル7に表示する。
(もっと読む)
距離センサ
【課題】 検出対象物7が未知であることに制約されることなく検出対象物7までの距離を正確に計測すること。
【解決手段】 診断素子3から受光素子5に診断光を異なる光量で投射し、受光素子5から出力される受光信号のピークレベルPx毎の補正時間Txを事前にサンプリングする。補正時間Txとは診断光を投光してから受光信号が基準信号に到達するまでの所要時間を称し、ピークレベルPxとは受光信号のピーク値を称するものであり、検出対象物7までの距離を測定するときには投光素子2が投光開始してから受光信号が基準信号に到達するまでの受光時間および受光信号のピーク値を測定する。そして、サンプリングデータからピーク値の測定結果に応じたピークレベルPxを取得し、ピークレベルPxの取得結果に応じた補正時間Txを取得し、受光時間Tの測定結果を補正時間Txの取得結果に基いて補正する。
(もっと読む)
移動再帰反射器を測定する絶対距離計
増分干渉計を使用することなく、移動外部再帰反射器またはそのほかの移動目標表面の1またはそれを超える次元の絶対距離測定および/または表面走査および/または座標測定が可能なレーザ・デバイスおよび方法。  (もっと読む)
(もっと読む)
オブジェクトを認識しかつ追跡するための方法
本発明は、センサの検出領域において、特にはレーザ・スキャナである少なくとも1つの電磁放射線用センサにより一定時間捉えられた、少なくとも1つのオブジェクトの画素を含む深度分解像を基礎としてオブジェクトを検出しかつ追跡するための方法に関する。この方法によれば、次のステップが連続サイクルにて実行される。現行画像の画素から少なくとも1つのカレント・オブジェクト輪郭が形成されるステップと、先行サイクルにおけるオブジェクトのために、先行サイクルにおける対応するオブジェクトに割り当てられた個々のオブジェクト輪郭から開始される現行サイクルにおいて、少なくとも1つのオブジェクト輪郭が予測されるステップと、前記オブジェクトのうちの少なくとも1つのために、前記カレント・オブジェクト輪郭から現在位置が決定され、及び/または、前記カレント・オブジェクト輪郭及び先行サイクルにおける前記オブジェクト輪郭からオブジェクトの速度が決定されるステップ。  (もっと読む)
(もっと読む)
非接触型検出装置及び制御装置
【課題】 演算の負担が少なく、確実に検出対象の状態を検出することができる非接触型検出装置、及びその検出結果に基づいて好適な制御を行うことができる制御装置を提供すること。
【解決手段】 ステップ100では、高輝度の赤外線を照射する。ステップ110では、PINに受信信号S1が入力したかを判定する。ステップ130では、中程度の輝度の赤外線を照射する。ステップ140では、PINに受信信号S2が入力したか否かを判定する。ステップ160では、低輝度の赤外線を照射する。ステップ170では、PINに受信信号S3が入力したかを判定する。ステップ190では、メモリに記憶した受信信号の状態に応じて制御の内容を設定する。例えば受信信号S1、S2が記憶されている場合には、第2領域に手が進入したとみなしてドームランプ1を点灯し、受信信号S1〜S3が記憶されている場合には、第3領域に手が進入したとみなしてドームランプ1を点灯する制御を実施しない。
(もっと読む)
測距装置
【課題】 本発明は、測定分解能を変更することのできる測距装置を提供することを目的とする。
【解決手段】本発明の測距装置は、測距対象物に向けて所定の測定用信号を発信する発信部(110)と、前記測距対象物の方向から戻る信号を受信する受信部(120)と、前記発信部及び前記受信部を駆動する測定処理を実行し、前記受信部で受信された信号に基づいて前記測定用信号の発信から受信までの時間を検知すると共に、前記受信部が信号を受信する際の分解能を可変にする制御部(100’)とを備えたことを特徴とする。
(もっと読む)
発熱物体の位置検出装置
【課題】発熱物体の位置検出の高精度化を実現することができるうえに、装置全体の簡略化及び小型化を図ることができる発熱物体の位置検出装置を提供する。
【解決手段】光送信部2と、発熱物体Aが発する赤外線IR及び発熱物体Aで反射した反射光LRを集光する集光レンズ3と、赤外線IR及び反射光LRを分光する分光手段4と、分光手段4を経た赤外線IRを検出する赤外線センサ5と、分光手段4を経た反射光LRを検出する光受信部6と、赤外線センサ5及び光受信部6からのデータに基づいて発熱物体Aまでの距離を測定する信号処理手段7を備えた位置検出装置とし、赤外線画像で捕捉した発熱物体Aの方位及び距離を検出する。
(もっと読む)
光波測距装置
【課題】 安価なAD変換器を用いてAM方式光波測距装置を提供すること。
【解決手段】 光波測距装置は、主発振器11、第1PLL回路12、第2PLL回路13、レーザ駆動回路14およびLASER15からなる光源部10と、APD21および増幅器22からなる受光部20と、第1AD変換器31および第2AD変換器32からなるAD変換手段30と、位相差演算回路41からなる位相差検出手段40と、CPU51からなる距離検出手段50で構成されている。主発振器11から発振された基準電気信号が、互いに異なり、かつ択一的に選択される2種の周波数f1、f2を有し、サンプリング信号が、基準電気信号に対してn回に一度同期し、かつ、サンプリング信号の周波数fSが、基準電気信号の2種の周波数f1、f2に対して平均値を成し、AD変換手段が、サンプリング信号に基づいて、基準電気信号の一周期につき少なくとも一回のAD変換を行なう。
(もっと読む)
サインに基づく人間−機械相互作用
コミュニケーションは、人間−ロボット相互作用における重要な問題である。サインは、ユーザの命令又はコマンドを提供することにより機械との相互作用に用いられる。本発明の一実施形態は、人間の検出、人間のボディパーツ検出、手形状分析、軌道分析、向き決定、ジェスチャマッチング等を含む。形状及びジェスチャの多くの型が、コンピュータビジョンに基づく煩わしくない様式で認識される。多くのアプリケーションが、家電の遠隔制御、コンピュータ制御装置のマウスレス(及びタッチレス)操作、ゲーミング及び他方に命令を与えるための人間−ロボットコミュニケーションを含むこのサイン理解技術により実現可能となる。動的な検出ハードウェアが、ビデオレートでの深度画像のストリームを取得するために用いられ、深度画像のストリームは、情報抽出のために順次分析される。 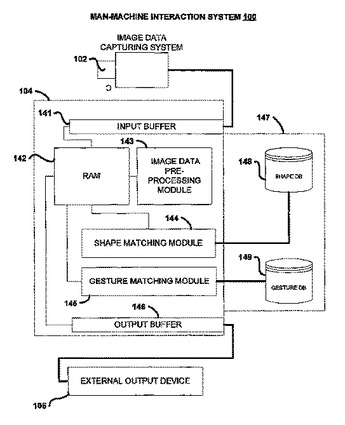 (もっと読む)
(もっと読む)
移動制御システム
本発明は、車両またはロボットアームなど移動プラットフォームの制御に使用できる移動制御システムに関する。本発明は特に車両用の運転支援、車両用のセルフパーキング支援システムに利用できる。3次元カメラ(12)がプラットフォーム、例えば車(102)上に置かれ、プラットフォームまわりの環境を撮像する(114)ように配置される。プロセッサ(7)が3次元情報を用いて環境モデルを生成し、このモデルを利用して移動制御信号を生成する。好ましくは、プラットフォームは環境に対して移動し、様々な位置からの環境の複数の画像を取得する。 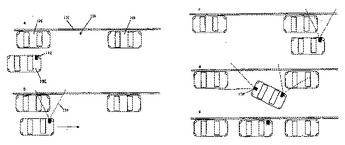 (もっと読む)
(もっと読む)
位置判定及びモーショントラッキング
プロセッサベースのシステム(301)において使用される位置判定及びモーショントラッキングのためのシステム及び方法。実施形態は、固定点(132)を中心として少なくとも1つの方向に動く方向転換器(130)と、サーチビーム(131)を位置ビーム(141)として反射する対象物(101)と、方向転換器の向きから少なくとも1つの角度位置を判定する論理回路(160)と、固定点(132)からの対象物の距離(104)を判定する論理回路(161)とを含む場合がある。  (もっと読む)
(もっと読む)
離れている2つの送信機および受信機を持つ周辺検出システム
本発明は、電磁波の2つの送信機および送信された電磁波の反射を受信するため適当に向けられる2つの受信機を備えた周辺検出システムに関し、第1の送信機が第1の受信機と共に、第1の目標領域に向けられ、第2の受信機が第2の受信機と共に、第2の目標領域に向けられている。第3の目標領域を検出するため、少なくとも第1の送信機の前に、この送信機から送信される電磁波の少なくとも一部を第3の目標領域へ少なくとも一時的に向ける光学手段が設けられ、少なくとも第2の受信機の前に、第1の送信機から第3の目標領域へ送られる電磁波の反射を少なくとも一時的に第2の受信機へ向ける光学手段が設けられていることが、提案される。光学手段は、なるべく常に設けられ、それぞれ1つの送信機のみが動作するので、それぞれ1つの受信機がそれぞれ妨げられることなく第3の目標領域を検出する。それにより、例えば自動車において、走行方向において車両の右側および左側に設けられる送−受信機対により、走行方向において全正面範囲が検出可能である。  (もっと読む)
(もっと読む)
標識設置方法
【課題】 車両の前方を監視するセンサの取付角度を調整する基準点をなす標識を設置する標識設置方法において、センサを車両に取付る角度の調整が、その前方に広大な空間を必要とすることなく、狭い空間であっても簡易かつ正確に実施できる標識設置によるセンサの取付角度調整方法を実現することを課題とする。
【解決手段】 紐23の一端をトランクカバー12に固定し、トランクカバー12を開いた状態で、紐23を車両10に付された基準点上を通過するように車両前方に延ばし、車両前方に延ばされた紐23を基準にして標識21を設置することを特徴とする。
(もっと読む)
量子効率変調を用いたCMOSコンパチブルの三次元イメージセンシングのためのシステム
高周波成分をS1=cos(ω・t)と理想化できる変調された周期的波形を有する光エネルギーを放射してターゲットを照射することにより、距離及び/または輝度を測る、好ましくはCMOSで実施可能な方法とシステム。放射された光エネルギーの一部分は、ターゲットにより反射され、複数の半導体光検出器のうち少なくとも一つにより検出される。光検出器の量子効率は、検出した信号を処理してターゲットと光検出器を隔てる距離zに比例するデータを作り出すために変調されている。検出は、放射された光エネルギーと反射された光エネルギーの一部分の間の位相変化の測定することを含む。量子効率は固定位相法または可変位相法により変調でき、高められた光電荷収集、差動変調、空間的マルチプレクシング及び時間的マルチプレクシングを用いて高めることができる。光検出器の容量と動作周波数において共振するインダクターを使って、本システムの必要電力条件を削減することもできる。本システムはチップ上の光検出器、関連エレクトロニクス、処理を含む。 (もっと読む)
321 - 337 / 337
[ Back to top ]